Содержание
Предыдущий § Следующий
7.7. Работа двигателя при пульсирующем токе якоря
Современные способы регулирования частоты вращения двигателей путем ншания их от выпрямителя или импульсного преобразователя перспективны, так как исключают потери в реостатах, позволяют производить рекуперативное торможение почти до полной
остановки, сравнительно легко поддаются автоматизации и т. д. Однако эти методы имеют и существенный недостаток двигатель работает при напряжении на якоре, содержащем переменную составляющую, что вызывает появление переменной составляющей тока якоря, т. е. ток якоря становится пульсирующим.
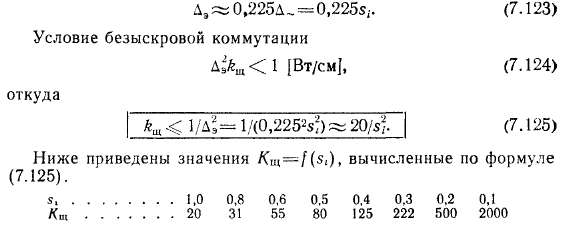
Пульсации напряжения и тока якоря. В неуправляемых выпрямителях, где выпрямляющими элементами являются диоды, а выпрямленное напряжение Uа жестко связано с переменным напряжением £2, подводимым к выпрямителю, амплитуда пульсаций напряжения и их частота определяются числом тактов выпрямления за период. Например, в однофазном мостовом выпрямителе (рис. 7.35, а) в каждом периоде изменения сетевого напряжения имеется два одинаковых такта выпрямления (рис. 7.35, б), поэтому частота пульсаций выпрямленного напряжения, а следовательно, и ча-гтота переменной составляющей Рис. 7.35. Схема мостового од- выпрямленного напряжения в 2 ра-
за выше частоты сети. Эта переменная составляющая несинусоидальна (рис. 7.35, в). Однако с достаточной точностью она может быть заменена синусоидальной кривой — первой
гармоникой разложения в ряд Фурье, изменяющейся с частотой,
в 2 раза большей частоты сети:
где м = 4л/о — угловая частота переменной составляющей выпрямленного напряжения.
Пренебрежение высшими гармониками напряжения тем более допустимо, что амплитуды токов, ими создаваемых, малы из-за большого индуктивного сопротивления обмоток двигателя.
Рис. 7.35. Схема мостового однофазного выпрямителя (а), кривая выпрямленного напряжения (б), переменная составляющая напряжения (в) и кривая выпрямленного тока (г)
При других схемах выпрямления также пренебрегают высшими гармониками.
Пульсации выпрямленного напряжения характеризуется коэффициентом пульсации
где т — число тактов выпрямления за период сетевого напряжения. В табл. 7.1 приведены частоты переменных составляющих выпрямленного напряжения и коэффициенты пульсации для наиболее распространенных схем выпрямления. Таблица 7.1
|
Наименование |
Однофазная двухполупериодная |
Трехфазная с нулевой точкой |
Трехфазная мостовая |
|
Число тактов т |
2 |
3 |
в |
|
Частота / |
2/с |
3/с |
6/с |
|
Коэффициент пульсации q |
0,67 |
0,25 |
0,057 |
Из табл. 7.1 видно, что даже в неуправляемых выпрямителях бывают значительные пульсации выходного напряжения. Пульсации тока якоря меньше пульсаций напряжения, хотя могут быть довольно большими (рис. 7.35, г).
Так, например, при однофазных выпрямителях */ = 0,67 и на электровозах переменного тока, где установлены такие выпрямители, пульсации тока якоря очень велики. Амплитуда переменной составляющей тока двигателя ограничивается практически только индуктивными сопротивлениями обмоток в цепи якоря
^ = 0,2 ...0,3 при больших токах нагрузки, s, = 0,4 ... 0,5 — при малых. Это объясняется тем, что амплитуда переменной составляющей тока зависит только от индуктивности реактора и двигателя и меняется сравнительно мало. Для уменьшения пульсации тока якоря можно было бы увеличить индуктивность реактора, однако это экономически нецелесообразно, так как сильно повышает массу и стоимость реактора, а также потери в нем, которые сейчас снижают КПД установки на 2% (их увеличение в 2...3 раза совершенно недопустимо). Большие потери в реакторе вызваны тем, что через его

обмотку проходит весь ток Наличие постоянной составляющей тока заставляет делать реактор с разомкнутой магнитной системой, в связи с чем он имеет большое число витков и сравнительно большое активное сопротивление
В трехфазных выпрямителях пульсация тока значительно меньше, так как меньше коэффициенты пульсации напряжения и выше частоты переменной составляющей
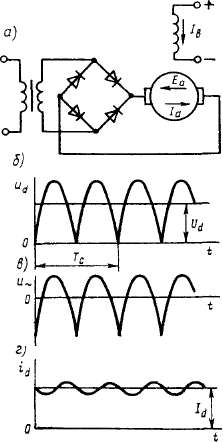
Рис 7 36 Схема однофазного мостового управляемого выпрямите ля (а) и кривая выпрямленного напряжения (б)
При трехфазной мостовой схеме пульсация напряжения менее 6%, а частота первой гармоники 300 Гц (при fc = 50 Гц), поэтому пульсации тока двигателя невелики и работа двигателя от такого выпрямителя практически не отличается от работы при питании от генератора постоянного тока
Однако при питании от управляемого выпрямителя пульсации тока и напряжения резко возрастают Управляемый выпрямитель (рис 7 36, а) имеет вместо диодов тиристоры, моментами включения которых можно управлять, подавая на их управляющий электрод импульс напряжения
Выпрямленное напряжение зависит от того, в какой момент времени подается импульс управления Обозначив через а угол, отсчитываемый от момента появления на тиристоре положительного напряжения до момента его включения, получим значение выпрямленного напряжения при непрерывном токе в двигателе
Ud=Uducoba. (7.96)
Кривая выпрямленного напряжения (рис 7 36, б) имеет значительно большие пульсации, чем при отсутствии регулирования, так как в течение времени, соответствующего углу а, на нагрузке напряжение отрицательно (ток продолжает проходить под действием ЭДС самоиндукции)
В управляемых выпрямителях коэффициент пульсации определяется по формуле
Высшие гармоники в управляемых выпрямителях больше, чем в неуправляемых.
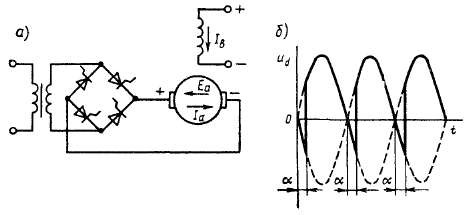
Из рис. 7.37 видно, что даже в трехфазном мостовом выпрямителе коэффициент пульсации достигает q=0,4, не говоря уже о двух-
Рис. 7.37. Зависимости q=f(a) для однофазного и трехфазного мостового выпрямителей
Рис. 7.38. Пульсация напряжения и тока (а) в импульсном регуляторе, зависимость коэффициента пульсации от заполнения (б)
фазном выпрямителе, где коэффициент пульсации может превышать значение ц=\,Ъ.
Следовательно, в двигателе, питаемом от управляемого выпрямителя, могут быть сильные пульсации тока якоря, особенно при больших углах регулирования.
При импульсном рр-улировании пульсация напряжения зависит от режима и принимает значения от максимального до нуля. Тактовая частота импульсного регулятора обычно очень велика: от 200 до 5000 Гц. Поэтому можно приближенно считать, что ток в цепи якоря изменяется прямолинейно (рис. 7.38, а) и за проводящий отрезок времени получает приращение

При s, = O,l и менее потери практически такие же, как при постоянном токе. Однако при s,>0,2 влияние пульсаций тока становится заметным и быстро возрастает с их ростом.
Потери можно представить и в другом виде, раскрыв скобки в (7 99):
Другими словами, кроме потерь от постоянного тока /ср существуют 'потери, возникающие из-за гпльсации:
Кроме пульсационных потерь появляются потери от вытеснения тока (потери от вихревых токов в проводниках), которые учитываются умножением пульсационных потерь на коэффициент Фильда:
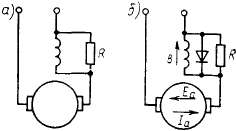
Рис. 7.39. Схема двигателя последовательного возбуждения, работающего при пульсирующем токе якоря
обычно £ф =1,05... 1,1; определение &ф рассмотрено в гл. 9 (при расчете добавочных потерь).
Из-за увеличения потерь в обмотках их температура (например, в тяговых двигателях выпрямительных электровозов) при пульсирующем токе якоря возрастает на 1О...2О°С по сравнению с температурой в режиме постоянного тока.
Потери в стали двигателя. При пульсирующем токе потери возрастают сравнительно мало, так как магнитный поток пульсирует незначительно. В двигателях с параллельным возбуждением обмотка возбуждения получает питание от источника, напряжение которого сглажено, т. е. двигатель фактически имеет независимое возбуждение. В двигателях последовательного возбуждения обмотка возбуждения шунтируется активным сопротивлением (рис. 7.39, а), через который и замыкается, в основном, переменная составляющая тока. Часто параллельно сопротивлению включается полупроводниковый диод (рис. 7.39, б), что еще сильнее сглаживает ток в обмотке возбуждения. Обычно пульсация тока в обмотке возбуждения менее 3%, а пульсация потока возбуждения еще меньше. Потери от вихревых токов в массивных частях магнитопровода, которые были бы очень велики при пульсациях тока возбуждения и магнитного потока, минимальны.
Пульсирует только МДС якоря, значит, переменную составляющую имеет поток якоря, который замыкается через шихтованные участки магнитной цепи: сердечник якоря, зубцы и сердечники главных полюсов. Наибольшая индукция В~ от переменной составляющей магнитного потока — в зубцах якоря. Ориентировочное зна-
чение В~ можно получить, сравнив МДС переменной составляющей якоря Fa~ с МДС главных полюсов. Учитывая, что амплитуда переменной составляющей тока якоря Im\=SiIa, можно считать Fa ~ =s,Faq и, следовательно,
где &ном — коэффициент устойчивости в номинальном режиме.
Так как knoK = 2...3, амплитуда переменной составляющей МДС якоря невелика и малы дополнительные потери в стали, пропорциональные квадрату магнитной индукции. Например, если s,=0,3 и ^ноч=2, то s,2/k2uoyi=0,0225, т. е. потери в стали зубцов под краем полюса, вызванные пульсациями потока якоря,
где f ~—частота пульсаций МДС якоря (при однофазном выпрямлении ^ = 100 Гц); Apz — потери в стали зубцов от основного потока.
В среднем потери в зубцах значительно меньше, чем под краем полюса, где МДС якоря максимальна:
Обычно при расчете дополнительные потери в стали, возникающие из-за пульсации МДС якоря, не учитываются.
Потенциальные условия на коллекторе. Из-за пульсации тока якоря они ухудшаются. В соответствии с пульсацией тока якоря пульсирует МДС якоря, а следовательно, и коэффициент устойчивости
в связи с чем возникают пульсации напряжения между смежными пластинами и максимальное kn значение возрастает. Например, у машины с равномерным зазором в режиме максимального ослабления поля коэффициент искажения поля возрастет со значения
При типичных значениях kf=2 (коэффициент устойчивости k=\) и s,=0,3 максимальное напряжение между смежными пластинами возрастает примерно на 20%. Таким образом, при пульсирующем токе якоря более вероятно возникновение вспышки между смежными коллекторными пластинами. Для перерастания вспышки
в круговой огонь требуется определенное время, чтобы успел нара сти ток в дуге между пластинами и чтобы ионизировалось пространство над коллектором. Опыты по изучению кругового огня показали (гл. 3), что вспышка от момента возникновения до перерастания в мощную дугу перемещается вместе с коллектором на 5 ... 10 см, чему соответствует время около (2...5)10~3 с при линейной скорости на поверхности коллектора и„ол~20 м/с.
При частоте пульсаций от 100 до 300 Гц длительность полупериода, за который максимальное напряжение между пластинами увеличивается, составляет от 5 до 1,6 мс — время, вполне достаточное для перерастания вспышки в круговой огонь.
При пульсирующем токе якоря нужно принимать меры к некоторому снижению максимального напряжения между смежными коллекторными пластинами: увеличивать минимальный коэффициент устойчивости, снижать напряжение на коллекторе и т. п.
Коммутация при пульсирующем токе якоря. Двигатель, питающийся от выпрямителя, имеет пульсирующий ток якоря, дополнительных полюсов и компенсационной обмотки, но постоянный магнитный поток. Поэтому коммутация в двигателях пульсирующего тока протекает легче, чем в коллекторных двигателях переменного тока, где переменные и ток якоря, и ток возбуждения, следовательно, и магнитный поток. Переменный магнитный поток индуцирует в короткозамкнутой секции, находящейся в процессе коммутации, трансформаторную ЭДС et, амплитуда которой
и которая вызывает ток, замыкающийся через щетки Добавочный ток, разрываемый щеткой, вызывает искрение, тем более интенсивное, чем больше eim.
В двигателях пульсирующего тока трансформаторная ЭДС также может возникнуть и влиять на коммутацию, хотя принципиально можно ее избежать. Например, в двигателе с последовательным возбуждением обмотка возбуждения зашунтирована сопротивлением Rm (рис. 7.39) и на нем возникает переменная составляющая напряжения, амплитуда которого
Так как это же напряжение приложено и к обмотке возбуждения, в ней индуцируется ЭДС Ев~ , уравновешивающая приложенное напряжение. Амплитуда ЭДС одного витка возбуждения приблизительно равна трансформаторной ЭДС в короткозамкнутой секции, поскольку они сцеплены практически с одним и тем же потоком:
etm = eBm = UmJ(2pwB)=slIaRJ(2pwB). (7.118)
Опыт проектирования и эксплуатации двигателей переменного тока показывает, что при e<m^3,0 В искрение становится недопу-
Опыт проектирования и эксплуатации двигателей переменного тока показывает, что при e<m^3,0 В искрение становится недопу-
стимо сильным. Для мощных двигателей пульсирующего тока обычно выбирают Rm таким, чтобы выполнялось условие etm^0,5 В. При этом неблагоприятное воздействие трансформаторной ЭДС мало. Иногда пытаются использовать индуктивность обмотки последовательного возбуждения для уменьшения пульсации тока и не шунтируют ее активным сопротивлением. Это нецелесообразно, так как можно расстроить коммутацию двигателя из-за появления
большой трансформаторной ЭДС, не говоря уже о резком увеличении потерь в ярме двигателя.
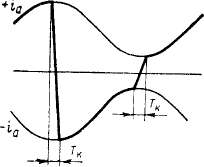
Изменение тока в короткозамкну-той секции в процессе коммутации при пульсирующем гоке якоря показано на рис. 7.40. Обычно период коммутации Гк = 6щ/уКОл«(1,0.. .0,1) Ю-3 с при скорости коллектора иКол —20 м/с и более и ширине щетки &щ=1,0... 2,0 см, т. е. на порядок меньше периода пульсаций тока при их частоте 100. ..300 Гц.
Поэтому можно считать, что за период коммутации ток в параллельной ветви не меняется и реактивная ЭДС
Рис. 7.40. Изменение тока в секции в процессе коммутации, при пульсирующем токе якоря
По обмотке дополнительных полюсов замыкается пульсирующий ток и поэтому МДС FH.n имеет переменную составляющую, пропорциональную ер^ . Если бы поток в зоне коммутации изменялся пропорционально изменению МДС Fa.n, то компенсация переменной составляющей реактивной ЭДС происходила бы автоматически. Однако поток дополнительных полюсов Фк замыкается по массивному ярму и сердечникам дополнительных полюсов, т. е. по магнитной
где 1а — число параллельных ветвей обмотки якоря.
Таким образом, реактивная ЭДС имеет переменную составляющую, совпадающую по фазе с переменной составляющей тока якоря.
Для безыскровой коммутации при постоянном токе должно соблюдаться условие £р.Ср + ек.ср=0. При пульсирующем токе это условие приобретет вид |ер + ек|ср—0, т. е. должны компенсироваться за период коммутации секции паза ЭДС ер.Ср и ер^ , обусловленные постоянной и переменной составляющими тока соответственно. Будем считать, что коммутация при постоянном токе налажена и тогда вопрос сводится к компенсации переменной составляющей реактивной ЭДС
цепи, которая плохо проводит переменный магнитный поток из-за возникновения в стали вихревых токов.
Эксперименты показали, что переменная составляющая потока в зоне коммутации Ф~ мала и часто имеет фазу, почти противоположную фазе МДС /гд.п~ . Рассмотрим качественную сторону явления (рис. 7.41).
При постоянном токе Фк= (^д.п—Fa)/Rt и <£><,=Fn.n/Ra, где Ф„— поток рассеяния добавочного полюса; Rb и /?„ — соответственно сопротивления зазора под добавочным полюсом и потоков рассеяния.
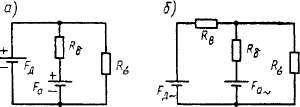

Рис. 7.41. Схема замещения для МДС и потоков дополнительного полюса при постоянном (а) и переменном (б) токе
Рис. 7.42. Шихтованная вставка для улучшения коммутации при пульсирующем токе
При переменном токе (рис. 7.41, б)
где RB — эквивалентное сопротивление, вносимое наличием вихревых токов; а=1—/?в/(Rn + Ra)•
Чем больше /?„, тем меньше переменная составляющая потока в зоне коммутации; при условии а/д.п</га~ переменная составляющая Фк~ «опрокидывается», т. е. уже не улучшает, а ухудшает коммутацию.
Предпринимались попытки улучшить коммутацию путем установки шихтованных вставок и шихтованных сердечников добавочных полюсов (рис. 7.42), которые уменьшают действие вихревых токов, благодаря чему возрастает магнитный поток в зоне коммутации. Кроме того, шихтованная магнитная система улучшает качество переходных процессов в двигателях при резких изменениях тока нагрузки и питающего напряжения.
Однако шихтованная магнитная система не полностью устраняет возможность искрения из-за пульсации тока якоря, так как вихревые токи в ярме и полюсе все же возникают, хотя и существенно ослабляются. Кроме того, фаза потока Фк~ не соответствует фазе ■Рд.п~ и, следовательно, не полностью компенсируется переменная составляющая реактивной ЭДС.
Если для работы при пульсирующем токе якоря выбирается двигатель обычной конструкции — с массивными ярмом и сердечниками добавочных полюсов, то он должен иметь достаточный «запас по коммутации».
Считая, что поток в зоне коммутации постоянен и переменная составляющая реактивной ЭДС ер~. ничем не компенсируется, можно рассматривать эту составляющую как периодическое нарушение коммутации
Из этих данных видно, что опасность искрения пропорциональна квадрату коэффициента пульсации и практически при коэффициенте пульсации s, = 0,4 и более опасное искрение под щеткой неизбежно. С другой стороны, пульсация тока менее 10% незначительно сказывается на коммутации машины.
В большинстве случаев коммутация является нормальной, если коэффициент пульсации тока якоря в мощных двигателях не превышает значения s, = 0,2. Сгладить ток до такого значения не представляет труда ни в трехфазных выпрямителях, ни в импульсных регуляторах, где частота пульсаций высокая. Исключение представляют однофазные выпрямители, где нужно применять очень надежные с точки зрения коммутации двигатели.
При малых частотах вращения, когда реактивная ЭДС мала (и мал Кщ), можно допустить повышенную пульсацию тока согласно формуле (7.125). Это довольно хорошо согласуется со свойствами управляемых выпрямителей, у которых пульсации максимальны при глубоком регулировании, т. е. при малом выпрямленном напряжении. Учитывая данное положение, можно предотвратить установку сглаживающих реакторов излишних габаритов и стоимости.
Взяв отношение периода коммутации Т„ к периоду пульсации тока Тъ , определим, является это нарушение кратковременным или длительным. Например, при Т^ =0,01 с и Гпда1,10~3 с Тп/Т~, =0,1 и нарушение нужно считать длительным, т. е. не учитывать демпфирующее влияние коммутируемых секций соседних пазов. Тогда эффективная погрешность по (4.83)