

Содержание
Предыдущий § Следующий
11.2. Методы и средства контроля параметров и характеристик электрических машин малой мощности для систем автоматики
Методы и средства контроля параметров и характеристик ЭМММ при изготовлении, поставке, на входном контроле у потребителя и в условиях эксплуатации регламентируются общими техническими условиями, техническими условиями на конкретные изделия, нормативными документами по их выбору, применению и эксплуатации.
Все проверки и испытания, которые могут производиться у потребителя, можно разделить на две группы: общие для всех
видов ЭМММ и видовые, присущие определенным функциональным группам ЭМММ.
11.2.1. Методы проверки и контроля
параметров, общие для всех электрических
машин малой мощности
Общими для всех ЭМММ являются контроль сопротивления и электрической прочности изоляции токоведущих цепей и обмоток машин, контроль нагрева обмоток или других частей машин, оценка возникающих при работе машин шумов и вибраций, а также радиопомех.
Проверку сопротивления изоляции токоведущих цепей и обмоток машин относительно корпусов и относительно друг друга проводят мегаомметром с напряжением 100 В для машин с напряжением питания не более 60 В и мегаомметром с напряжением 500 В для машин с напряжением питания более 60 В. Проверку электрической прочности изоляции машин проводят на испытательной установке переменного синусоидального тока частотой 50 Гц и мощностью на стороне высокого напряжения не менее 0,5 кВ-А. Испытанию подвергают каждую электрически раздельную цепь. Начальное испытательное напряжение не должно превышать '/з полного его значения.
В зависимости от напряжения питания ЭМММ устанавливаются различные значения испытательного напряжения:
Проверку электрической прочности изоляции проводят в нерабочем состоянии ЭМММ. Испытательное напряжение при проверке электрической прочности изоляции в условиях воздействия повышенной влажности должно быть в 2 раза меньше, чем в нормальных условиях.
Оценку теплового состояния ЭМММ производят, как правило, посредством измерения температуры обмоток машин методом сопротивления или, если это затруднено или невозможно, температуры других частей машин (щеткодержателей, корпуса и т. д.) с
помощью термоэлектрических преобразователей.
Сопротивление обмоток определяют при помощи измерительного моста, омметра или методом амперметра — вольтметра. Сопротивление обмоток в рабочем состоянии ЭМММ измеряют после достижения практически установившейся температуры, при отключенном напряжении питания. Если измерение сопротивления обмоток можно осуществить за время, не превышающее 3 с после отключения напряжения, сопротивление следует определять по результатам одного измерения. Температуру обмотки, °С, вычисляют по формуле
где гх — сопротивление обмотки в практически холодном состоянии при температуре окружающей среды 7^, Ом; гг — сопротивление обмотки постоянному току при практически установившейся температуре ЭМММ, Ом; К — коэффициент, равный 235 для обмоток из медных проводов и 245 из алюминиевых проводов.
Для контроля собственной вибрации и акустического шума ЭМММ нормируют, как правило, среднеквадратичный уровень звука и виброскорости. Для измерения этих параметров используют преобразователи звукового давления и вибрационного ускорения в электрический сигнал — микрофон и пьезо-датчи'ки. Сигнал, пропорциональный вибрационному ускорению, интегрируют для получения напряжения, пропорционального виброскорости, сигнал усиливают, детектируют и подают на измеритель среднеквадратичного значения напряжения. При измерении уровня звука LA показывающий прибор шумомера градуируют в децибелах относительно условного нулевого уровня звукового давления ро = 2-10~5 Па:
LA = 20\g(pA/p0).
Это уравнение принято для оценки уровня звука, как наилучшим образом моделирующее восприятие органом слуха человека звукового давления рА, при этом ро характеризует порог слышимости на частоте 1000 Гц. Измерение уровня звука производят в специальных звукоизоляционных камерах, обеспечивающих уровень фона не более 20 — 30 дБ. Большое значение имеет расположение микрофона относительно контролируемой машины и способ его подвески.
Для двигателей малой мощности изме-
рение LA производят, как правило, в нескольких точках на расстоянии 1 м от контура, установленного на растяжках двигателя. За уровень звука принимают наибольшее из полученных значений.
При измерении виброскорости пьезодат-чики устанавливают на корпусе двигателя в точках, где предположительно вибрационные процессы проявляются в большей степени.
По наибольшему уровню виброскорости двигатель относят к одному из восьми классов вибрации, установленных стандартами ГОСТ 16921-83 и 20832-75, соответствующих значениям виброскорости от 0,28 до 7 мм/с.
Для более детального анализа виброакустической активности двигателя производят измерения октавных и третьеоктавных уровней звука, а иногда и амплитудно-частотного спектра звука или вибрации. Это возможно осуществить при помощи соответствующих фильтров и анализаторов спектра электрического сигнала.
Отечественной промышленностью выпускается ряд приборов, соответствующим набором которых можно создать метрологическое обеспечение для оценки виброакустической активности двигателей и других устройств.
К числу таких приборов относятся:
измерительные микрофоны М-101, М-201 с предусилителями ПМ-1, ПМ-2; пьезоэлектрические преобразователи виброускорения ИС-312, ИС-313А, ДН-3, ДН-4; электрические фильтры ФЭ-1, ФЭ-2, ФЭ-3; измерители шума Ш-63, «Шум-1»; измерители вибрации и шума ИШВ-1, ПИ-1, СИ-1, ВШВ-003; измерители нескольких параметров вибраций СИ-2, У В-15-66, ИВПШ, ВИА-2; анализаторы спектра С4-48, СК4-56; вычислительные многоканальные анализаторы спектра СК4-72, СК4-71.
При работе коллекторных машин постоянного тока в результате коммутации, а также скачкообразного изменения токов в обмотках и подводящих проводах бесконтактных двигателей постоянного тока, шаговых и других машин возникают помехи по цепям питания и электромагнитные помехи в окружающем пространстве, которые мешают нормальной работе радиоприемных устройств.
Ориентировочные уровни радиопомех, возникающих при работе коллекторных и бесконтактных двигателей постоянного тока, представлены в табл. 11.1 и 11.2.
Напряжение радиопомех и напряженность поля радиопомех проверяются по ме-
Таблица 11 1. Уровень радиопомех коллекторных двигателей
|
Частота, мГц |
0,15 |
0,5 |
2,5 |
20 |
60 |
150 |
|
Уровень помех по цепям питания, мВ |
1000 |
300 |
60 |
0,3 |
0,2 |
0,01 |
|
Уровень помех по полю, мкВ |
До 1000 1-2 м |
мкВ на расстоянии от двигателя |
||||
Таблица 11.2. Уровень радиопомех бесконтактных двигателей постоянного тока
|
Частота, мГц |
0,15 |
0,5 |
1,0 |
3,0 |
30 |
100 |
|
Уровень помех по цепям питания, мкВ |
600 |
150 |
100 |
20 |
20 |
10 |
|
Уровень помех по полю, мкВ |
20 |
20 |
10 |
10 |
5 |
5 |
тодике, соответствующей требованиям ГОСТ 16842-82 и общесоюзных норм допускаемых индустриальных радиопомех (нормы 11 — 76) Государственной комиссии по радиочастотам СССР.
11.2.2. Методы контроля параметров
электродвигателей малой мощности,
электровентиляторов и муфт
Силовые и управляемые электродвигатели плавного вращения (в отличие от шаговых) имеют много общих параметров и характеристик, так как они близки по назначению. Для этих электродвигателей дается общая система основных параметров с указанием специфичных параметров, определяющих функциональное назначение отдельных видов электродвигателей (табл. 11.3).
Для измерения частоты вращения используют в основном два способа: способ непосредственного соединения измерительного устройства частоты вращения (тахометра, тахогенератора, таходатчика) с валом электродвигателя и стробоскопический способ, основанный на использовании стробо-эффекта ламп с пульсирующим световым
потоком. Приборы для измерения частоты вращения на основе стробоскопического эффекта (стробоскопы, строботахометры) обеспечивают точность измерения, определяемую стабильностью частоты генератора световых импульсов.
Для электродвигателей с электронными регуляторами, имеющих высокую стабильность частоты вращения, измерение этого параметра целесообразно проводить с помощью цифровых частотомеров (типа 43-32, 43-29 и др.).
Электромеханическую постоянную времени электродвигателей определяют, как правило, на холостом ходу при номинальном напряжении питания. Существует ряд методов измерения электромеханической постоянной времени, заключающихся в осцилло-графировании изменения ускорения, частоты напряжения или тока различных датчиков, сочлененных с валом электродвигателя.
Наиболее простым и приемлемым по точности является метод, основанный на регистрации напряжения тахогенератора, сочлененного с валом испытуемого электродвигателя. Электромеханическая постоянная в этом случае определяется как 7з времени от момента включения двигателя до достижения им 95 % установившейся частоты вращения. При необходимости полученное значение электромеханической постоянной может быть уточнено посредством учета момента инерции ротора тахогенератора.
Напряжение трогания проверяют на холостом ходу в нескольких различных положениях якоря (ротора) электродвигателя, плавно изменяя напряжение питания от нуля до значения, при котором вал электродвигателя начинает равномерно вращаться. Для исполнительных электродвигателей напряжение трогания определяют, плавно изменяя напряжение на обмотке управления, при но-
В А С
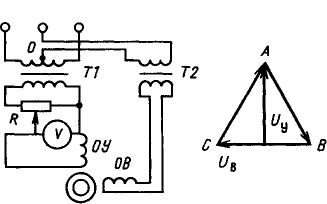
Рис. 11.3. Схема и векторная диаграмма преобразования трехфазной системы напряжений в двухфазную со сдвигом по фазе 90° • ОУ, ОБ — обмотки управления и возбуждения двигателя
Таблица 11.3. Система основных параметров электродвигателей переменного
и постоянного тока
|
Зид электродвигателя |
||||||
|
БДПТ |
||||||
|
Параметр |
АД |
АДУ |
сд |
кдпт |
силовые |
управ- |
|
ляемые |
||||||
|
Напряжение питания U, В |
+ |
+ |
+ |
+ |
+ |
+ |
|
Напряжение управления Uy, В |
— |
+ |
— |
+ |
— |
+ |
|
Напряжение возбуждения UB, В |
— |
— |
— |
+ |
— |
— |
|
Частота напряжения /, Гц |
+ |
+ |
+ |
— |
— |
— |
|
Потребляемый ток: |
||||||
|
при холостом ходе Iq, A |
+ |
+ |
+ |
+ |
+ |
+ |
|
в номинальном режиме /НОМ' А |
+ |
+ |
+ |
+ |
+ |
+ |
|
Начальный пусковой момент Ми, |
+ |
+ |
+ |
+ |
+ |
— |
|
Нм |
||||||
|
Начальный пусковой ток /п, А |
+ |
+ |
+ |
+ |
+ |
— |
|
Кратность пускового момента км, |
+ |
— |
+ |
+ |
+ |
— |
|
отн. ед. |
||||||
|
Кратность пускового тока к/, |
+ |
— |
+ |
+ |
+ |
— |
|
отн. ед. |
||||||
|
Напряжение трогания [7тр, В или |
— |
+ |
— |
+ |
— |
+ |
|
мВ |
||||||
|
Вращающий момент номиналь- |
+ |
+ |
+ |
+ |
+ |
+ |
|
ный М1ЮМ, Н ■ м |
||||||
|
Момент входа в синхронизм Л/Вх, |
— |
— |
+ |
— |
— |
— |
|
Нм |
||||||
|
Максимальный синхронизирую- |
- |
- |
+ |
- |
- |
- |
|
щий момент Мсшяч, Н • м |
||||||
|
Частота вращения: |
||||||
|
при холостом ходе щ, об/мин |
+ |
+ |
— |
+ |
+ |
+ |
|
в номинальном режиме ином, |
+ |
+ |
— |
+ |
+ |
+ |
|
об/мин |
||||||
|
синхронная ис, об/мин |
- |
- |
+ |
- |
- |
- |
|
Точность стабилизации частоты |
— |
— |
+ |
+ |
— |
+ |
|
вращения 6„, % |
||||||
|
Полезная мощность номинальная |
+ |
+ |
+ |
+ |
+ |
+ |
|
/'гном, Вт |
||||||
|
Потребляемая мощность в номи- |
+ |
+ |
+ |
+ |
+ |
+ |
|
нальном режиме Pihom, Вт |
||||||
|
Коэффициент полезного действия |
+ |
+ |
+ |
+ |
+ |
+ |
|
л. % |
||||||
|
Коэффициент мощности cos(p |
+ |
+ |
+ |
— |
— |
— |
|
Электромеханическая постоянная |
+ |
+ |
+ |
+ |
+ |
+ |
|
времени тм, с |
||||||
|
Время разгона tp, с |
+ |
+ |
— |
+ |
+ |
+ |
|
Время вхождения в синхронизм |
— |
— |
+ |
— |
— |
— |
|
?с, С |
||||||
Примечания: 1 Знаком «+» отмечены параметры, характеризующие данный вид изделий.
2. В таблице приняты обозначения: АД — асинхронный электродвигатель; АДУ — асинхронный управляемый электродвигатель, СД — синхронный электродвигатель; КДПТ — коллекторный электродвигатель постоянного тока; БДПТ — бесконтактный электродвигатель постоянного тока.
минальном напряжении на обмотке возбуждения. За напряжение трогания принимают максимальное значение измеряемой величины.
При испытании некоторых типов управляемых асинхронных двигателей требуется наличие системы двух напряжений, сдвинутых по фазе на 90°. Для этого применяется схема, построенная на трансформаторах 77 и Т2 (рис. 11.3). Схема преобразует трехфазное напряжение сети в двухфазное со сдвигом по фазе 90°, при этом
uy = kTluAC; uB = kl2uCB,
где fcTi и /сТ2 — коэффициенты трансформации; Uу и UB — напряжения управления и возбуждения.
Пусковой момент электродвигателей измеряют, как правило, при минимально допустимом напряжении питания в ненагретом состоянии машины. Все способы измерения пусковых моментов основаны на сравнении электромеханических моментов электродвигателей малой мощности, которые могут быть получены при частоте вращения, равной нулю, с механическими моментами, создаваемыми нагрузочными устройствами. В качестве последних могут использоваться шкивы, коромысла и рычаги вместе с пружинными динамометрами и весами или определенными значениями грузов. Во избежание перегрева обмоток время нахождения электродвигателя под током при измерении пускового момента должно быть не более 1 — 3 с.
Крутизну механической характеристики Км проверяют измерением частоты вращения при холостом ходе и нагрузочном моменте, равном номинальному вращающему моменту. Значение Км рассчитывают по формуле
Кы = ("о ~ "ном)/-МНОм>
где по — частота вращения при холостом ходе, об/мин; лном — частота вращения, об/мин, при нагрузочном моменте, равном номинальному вращающему моменту Мном. Асимметрию частоты вращения двигателей определяют измерением частоты вращения при правом и левом направлениях вращения при номинальных напряжениях питания и номинальном моменте нагрузки. Значение асимметрии частоты вращения, %, находят по формуле
где ипр, «лев — частота вращения соответственно при правом и левом направлениях вращения, об/мин.
Нелинейность регулировочной характеристики JV управляемых электродвигателей проверяют в определенном диапазоне напряжений управления при номинальном нагрузочном моменте. Значение N, %, рассчитывают по формуле
гДе "изм ~~ "р ~ наибольшая разность между фактической частотой вращения, измеренной при некотором значении напряжения управления, и частотой вращения для этого напряжения, рассчитанной по уравнению прямой линии, проходящей через точки регулировочной характеристики, соответствующие граничным значениям диапазона напряжений управления.
Потребляемый ток, потребляемую мощность и максимальный статический синхронизирующий момент шаговых двигателей (ШД) проверяют в режиме фиксированной стоянки под током. При этом ток и мощность проверяются при максимальном напряжении питания не позднее чем через 3 с после включения напряжения, статический момент Мст — в установившемся тепловом режиме при номинальном напряжении. На роторе ШД создают с помощью шкива и груза момент, равный Мот, при этом ротор не должен проворачиваться.
При проверке шага а и статической погрешности отработки шагов 5а одно из устойчивых положений ротора принимают за начало отсчета, относительно которого определяют разность между измеренным и расчетным углами поворота ротора. Измерения проводят при всех устойчивых положениях ротора в пределах оборота при холостом ходе.
Статическую погрешность 6Я, %, определяют по формуле
где + 5, — наибольшая положительная разность между измеренным и расчетным углами поворота ротора; — 8, — наибольшая отрицательная разность между измеренным и расчетным углами поворота ротора.
Номинальную приемистость ШД /Пр7„ом при пуске из состояния фиксированной стоянки под током проверяют при включении двигателя по схеме рис. 11.4. При отсутствии пропуска шагов и выбега ротор ШД должен последовательно занимать все фиксированные положения, отличающиеся друг от друга на один шаг. Контроль правильности работы ШД осуществляют путем

Нелинейность механической характеристики вычисляют но формуле
Рис. 11.4. Схема включения ШД для проверки приемистости:
НУ — нагрузочное устройство, БУ — блок управления, ЗИ — задатчик импульсов, ЗГ — задающий генератор
сравнения числа управляющих импульсов и числа отработанных шагов. Проверку максимальной приемистости ШД проводят аналогично, но без создания момента нагрузки тормозом. Статический фиксирующий момент проверяют в обесточенном состоянии с помощью моментомера или груза, подвешенного на шкив определенного диаметра.
Полная проверка аэродинамических параметров электровентиляторов (ЭВ) требует наличия сложного специального оборудования. Методы заводских аэродинамических испытаний ЭВ и методика расчета аэродинамических характеристик изложены в ГОСТ 10921-74. У потребителя целесообразно контролировать частоту вращения и потребляемый ток ЭВ обычными методами, применяемыми для контроля частоты вращения и тока электродвигателя.
Проверку максимального передаваемого момента приводных муфт проводят при заторможенном ведущем и свободном ведомом валах при помощи шкива с нитью и грузом на ведомом валу муфты. Проверку крутизны, гистерезиса и нелинейности статической характеристики проводят при максимальной частоте вращения ведущего вала и частоте вращения ведомого вала, равной нулю. Ток в обмотке управления изменяют равными ступенями от нуля до значения, равного току приЛ максимальном напряжении управления. При каждом значении тока фиксируют значения моментов. По полученным данным строят статические характеристики М„=/(/у).
Проверку нелинейности механической характеристики индукционных муфт выполняют при максимальной частоте вращения ведущего вала. На обмотку управления подают ток, соответствующий номинальному передаваемому моменту. Ведомый вал муфты нагружают моментами от нуля до значения, при котором частота вращения ведомого вала равна нулю. Для каждого значения момента нагрузки с помощью строботахо-метра измеряют частоту вращения ведомого вала п2. На основе полученных данных строят зависимость М = f(n2).
где А — значение максимального отклонения момента от прямой, соединяющей точки максимального момента Мтах и максимальной частоты вращения птах.
Проверку скольжения индукционных муфт проводят при максимальной частоте вращения ведущего вала. На обмотку подают максимальное напряжение управления, а ведомый вал нагружают номинальным моментом. С помощью строботахометра измеряют частоту вращения ведущего и ведомого валов и вычисляют скольжение ,s.
Проверку напряжения (тока) включения и отключения фрикционных муфт осуществляют при максимальной частоте вращения ведущего вала. При этом ведомый вал нагружают номинальным моментом и плавно повышают напряжение на обмотке управления до начала вращения ведомого вала.
Напряжение (ток) отключения вычисляют по показанию вольтметра (амперметра) в момент остановки ведомого вала при плавном уменьшении напряжения (тока).
Проверку электромагнитной постоянной времени муфт проводят осциллографирова-пием процесса нарастания тока в обмотке после включения напряжения управления. Постоянную времени определяют в точке осциллограммы переходного процесса, в которой ток управления составляет 0,63 установившегося значения.
11.2.3. Методы и средства контроля параметров информационных электрических машин
В устройствах автоматики и вычислительной техники широкий круг функциональных преобразований информации, представляемой в виде электрических и механических величин, осуществляется с использованием информационных электрических машин (ИЭМ). В основе системы параметров ИЭМ лежит комплекс параметров, определяющих точностные возможности ИЭМ с учетом основных и дополнительных погрешностей (табл. 11.4). Наряду с параметрами, определяющими качество функциональных преобразований, система параметров ИЭМ содержит также совокупность показателей, определяющих возможность их сопряжения между собой и с другими элементами аппаратуры.
Основными методами контроля параметров ИЭМ являются методы непосредственного и косвенного измерения, а для
|
Параметр |
Вид ИЭМ |
||||||
|
ВТ |
Сельсины |
ФВ |
ДУ |
тгп |
ТГА |
ГОН |
|
|
Напряжение возбуждения UB, В |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
Частота напряжения возбуждения f\ |
+ |
+ |
+ |
+ |
— |
+ |
— |
|
Гц, кГц |
|||||||
|
Напряжение выходное £/вых, В |
+ |
— |
+ |
+ |
— |
— |
+ |
|
Частота выходного напряжения /вых, |
— |
— |
— |
— |
— |
— |
+ |
|
Гц |
|||||||
|
Мощность выходная Рпых, Вт |
— |
— |
— |
— |
_ |
— |
+ |
|
Частота вращения, об/мин |
|||||||
|
номинальная имом |
— |
- |
— |
— |
+ |
+ |
+ |
|
допустимая паоп |
+ |
+ |
+ |
— |
— |
— |
— |
|
предельная ппр |
— |
— |
— |
+ |
— |
+ |
— |
|
Крутизна выходного напряжения S, |
+ |
+ |
- |
+ |
+ |
+ |
|
|
В/угл. град, (В-мин)/об |
|||||||
|
Коэффициент трансформации К, |
+ |
- |
+ |
+ |
— |
- |
— |
|
отн. ед. |
|||||||
|
Сдвиг фазы (7„ых относительно £/„ |
+ |
— |
— |
+ |
- |
+ |
— |
|
ф, угл. град |
|||||||
|
Момент трения статический А/Тр, |
+ |
+ |
+ |
- |
+ |
— |
— |
|
Н см |
|||||||
|
Максимальный синхронизирующий |
— |
+ |
— |
— |
- |
— |
|
|
момент Мтах, Н • см |
|||||||
|
Максимальное напряжение синхро- |
+ |
— |
— |
— |
— |
— |
|
|
низации Ucnnn, В |
|||||||
|
Время успокоения робота tycn, с |
- |
+ |
— |
— |
— |
— |
— |
|
Сопротивление нагрузки Л,„ ZH, Ом, |
— |
— |
+ |
+ |
+ |
+ |
|
|
кОм |
|||||||
|
Полное входное сопротивление хо- |
+ |
— |
+ |
— |
— |
— |
— |
|
лостого хода Zq\, Ом |
|||||||
|
Полное сопротивление обмоток |
- |
— |
+ |
+ |
— |
+ |
— |
|
2ВЫХ, Ом |
|||||||
|
Момент инерции ротора 7р, кг • м2 |
— |
- |
- |
— |
+ |
+ |
+ |
|
Сопротивление обмотки постоян- |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
ному току R, Ом |
|||||||
|
Зона нечувствительности «„,„„ |
— |
— |
— |
— |
+ |
— |
— |
|
об/мин |
|||||||
|
Коэффициент пульсации кпул, % |
— |
— |
— |
— |
+ |
— |
— |
|
Переходное сопротивление контакт- |
+ |
- |
— |
+ |
— |
— |
— |
|
ного узла Rnep, Ом |
|||||||
|
Номинальный угол поворота а, |
— |
— |
+ |
— |
— |
— |
|
|
угл. град |
|||||||
|
Ток возбуждения потребляемый /, |
— |
+ |
+ |
+ |
+ |
— |
— |
|
А |
|||||||
|
Электрическая постоянная времени |
— |
— |
— |
- |
+ |
— |
— |
|
х„ с |
|||||||
|
Погрешность отображения синус- |
+ |
— |
— |
— |
— |
— |
— |
|
ной (косинусной) зависимости е, %, |
|||||||
|
угл. град |
|||||||
|
Погрешность отображения линей- |
+ |
— |
+ |
— |
— |
— |
|
|
ной зависимости ел, % |
|||||||
|
Нелинейность выходной характери- |
— |
_ |
_ |
_ |
+ |
+ |
_ |
|
стики AU, % |
|||||||
|
Асимметрия нулевых положений ро- |
+ |
+ |
— |
— |
— |
— |
— |
|
гора Да, угл. мин |
|||||||
Таблица 11.4. Система основных параметров ИЭМ
Продолжение табл. 11.4
|
Параметр |
Вид ИЭМ |
||||||
|
ВТ |
Сельсины |
ФВ |
ДУ |
тгп |
ТГА |
ГОН |
|
|
Асимметрия выходного напряжения |
_ |
_ |
_ |
_ |
+ |
_ |
— |
|
лт,, % |
|||||||
|
ЭДС квадратурной обмотки ет, % |
+ |
— |
— |
— |
— |
— |
— |
|
Отношение переменной составляю- |
— |
— |
- |
— |
— |
+ |
- |
|
щей остаточной ЭДС к крутизне |
|||||||
|
Ле0СТгП, об/мин |
|||||||
|
Остаточная ЭДС еост, %, мВ |
+ |
— |
— |
— |
— |
— |
— |
|
Разность коэффициентов транс- |
+ |
— |
— |
— |
- |
- |
- |
|
формации ДА", % |
|||||||
|
Погрешность следования в ТДП |
+ |
+ |
— |
— |
— |
— |
- |
|
Д9, угл. мин |
|||||||
|
Фазовая погрешность Дер, угл. мин |
— |
— |
+ |
+ |
— |
+ |
— |
|
Коэффициент несинусоидальности |
— |
— |
- |
- |
— |
— |
+ |
|
TJ V °/ ивыхл-н с» /о |
|||||||
|
Электрическая асимметрия обмоток |
— |
— |
— |
— |
— |
— |
+ |
|
ГОН Да, угл. мин |
|||||||
|
Изменение коэффициента транс- |
+ |
— |
- |
— |
— |
— |
— |
|
формации при изменении напря- |
|||||||
|
жения возбуждения ЪКц, % |
|||||||
|
Изменение нулевого положения |
+ |
— |
— |
— |
— |
— |
— |
|
ротора при изменении напряжения |
|||||||
|
возбуждения Да^, угл. мин или |
|||||||
|
угл. с |
|||||||
|
Фазовая погрешность при измене- |
+ |
— |
+ |
— |
— |
— |
— |
|
нии напряжения возбуждения Д(р(/, |
|||||||
|
угл. град или угл. мин |
|||||||
|
Фазовая погрешность при измене- |
+ |
— |
— |
— . |
— |
— |
— |
|
нии частоты возбуждения Дф/, |
|||||||
|
угл. град или угл. мин |
|||||||
|
Изменение коэффициента транс- |
+ |
— |
— |
+ |
- |
— |
— |
|
формации при изменении темпе- |
|||||||
|
ратуры окружающей среды 5ЛГ„ % |
|||||||
|
Изменение нулевого положения |
+ |
— |
— |
— |
— |
— |
— |
|
ротора при изменении темпера- |
|||||||
|
туры окружающей среды Да,, |
|||||||
|
угл. мин или угл. с |
|||||||
|
Изменение положения согласова- |
+ |
+ |
— |
— |
— |
— |
— |
|
ния ТДП при изменении темпера- |
|||||||
|
туры окружающей среды Д9„- |
|||||||
|
угл. мин или угл. с |
|||||||
|
Фазовая погрешность при измене- |
+ |
— |
+ |
+ |
— |
— |
— |
|
нии температуры окружающей |
|||||||
|
среды Дф„ град |
|||||||
|
Температурный коэффициент выход- |
— |
— |
— |
— |
+ |
+ |
— |
|
ного напряжения Ы//АТ, %/°С |
|||||||
|
Температурный коэффициент фазы |
— |
— |
— |
— |
— |
+ |
— |
|
выходного напряжения 5(р/Д Г, |
|||||||
|
%/°с |
|||||||
|
Изменение выходного напряжения |
- |
— |
— |
+ |
— |
— |
— |
|
при изменении температуры ок- |
|||||||
|
ружающей среды AU,, % |
|||||||
Продолжение табл. 11.4
Примечания: 1. Знаком « + » отмечены параметры, характеризующие данный вид изделий.
2. В таблице приняты обозначения: ВТ — вращающийся трансформатор, ФВ — фазовращатель, ДУ — датчик угла, ТГП — тахогенератор постоянного тока, ТГА — тахогенератор переменного тока асинхронный, ГОН — генератор опорного напряжения, ТДП — трансформаторная дистанционная передача.
точностных параметров — методы компенсации и сравнения. В этих целях используются оптико-механические угломерные и делительные устройства для задания и отсчета углов поворота роторов, электроизмерительные приборы и электронные устройства для измерения параметров и характеристик, точные делители напряжения и другое испытательное оборудование.
Измерение питающих напряжений, потребляемых токов и сопротивлений обмоток производят, как правило, с использованием стандартных измерительных приборов и методов измерений, которые не требуют дополнительных пояснений.
Контроль параметров ВТ. Изменение переходного сопротивления контактного узла ВТ проверяется с помощью моста постоянного тока или другого измерителя сопро-
~ О О ~ О
Рис. 11.5. Схемы проверки сопротивления
холостого хода: а-СКВТ, МВТ; 6 - ЛВТ
тивлений с погрешностью не более 5 %. За изменение переходного сопротивления принимается полуразность наибольшего и наименьшего значений измеренных сопротивлений при повороте ротора на 360°.
Полное входное сопротивление холостого хода синусно-косинусного ВТ (СКВТ), масштабного ВТ (МВТ) и ВТ для дистанционных передач (ВТДП) проверяется по схеме рис. 11.5, а, а линейного ВТ (ЛВТ)— по схеме рис. 11.5,6. Измерения должны проводиться приборами класса не хуже 1,5. Входное сопротивление вольтметра должно быть не менее 2 кОм/В.
Аналогично можно проверить полное входное сопротивление холостого хода квадратурных обмоток СКВТ и МВТ.
При проверке ZBX ЛВТ его ротор поворачивают на угол 60 + 3° от нулевого положения. За полное ZBX холостого хода принимают отношение напряжения возбуждения ие к току /в.
Электродвижущая сила квадратурной обмотки проверяется по схеме рис. 11.6. За ЭДС квадратурной обмотки принимают наибольшее напряжение по вольтметру U2 при повороте ротора ВТ на 360°.
Для проверки асимметрии нулевых точек и остаточных ЭДС в нулевых точках СКВТ включают по схеме, приведенной на рис. 11.7. После подачи напряжения возбуждения (при замкнутой квадратурной обмотке), поворачивая ротор, находим в зоне совмещения нулевых отметок минимальное показание по шкале узкополосного вольтметра U2 (или анализатора гармоник), которое соответствует остаточной ЭДС. При этом показание по шкале угломерного устройства фиксируют как «нулевое». Развернув ротор ВТ примерно
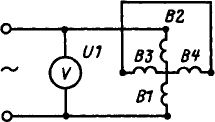
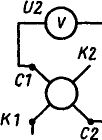
Рис. 11.6. Схема проверки ЭДС квадратурной обмотки СКВТ
Рис. 11.7. Схема проверки асимметрии нулевых точек и остаточной ЭДС в нулевых точках СКВТ и ВТДП
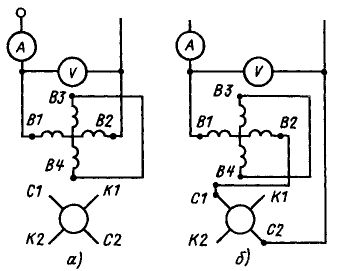
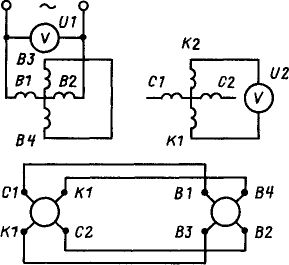
Рис. 11.8. Схема проверки следования ВТДП в дистанционной передаче
на 180°, доворачивают его до положения, при котором показание вольтметра снова будет минимальным и фиксируют вторую нулевую точку. Аналогичным образом определяют третью и четвертую нулевые точки, переключая вольтметр на косинусную обмотку. Последующие четыре нулевые точки (всего у СКВТ их должно быть восемь) определяют при подаче номинального напряжения питания на квадратурную обмотку (обмотка возбуждения должна быть замкнута).
В каждой нулевой точке по шкале угломерного устройства фиксируют отклонение от угла, кратного 90°, и по показанию вольтметра определяют остаточную ЭДС.
Для проверки погрешности следования ВТДП их устанавливают в угломерных устройствах, обеспечивающих поворот роторов с требуемой точностью, и включают по схеме, приведенной на рис. 11.8. После включения напряжения возбуждения роторы ВТ-датчика и ВТ-приемника устанавливают в согласованное положение, чему соответствует минимальное показание вольтметра U2- Затем ротор ВТ-датчика поворачивают по часовой стрелке через 10° в диапазоне углов 0 — 360°, а ротор ВТ-приемника поворачивают в каждой фиксированной точке до положения согласования.
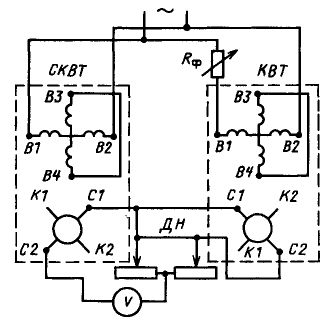
Рис. 11.9. Схема проверки погрешности отображения синусной зависимости СКВТ
Проверка погрешности отображения синусной, зависимости сводится к сравнению фактического выходного напряжения ВТ с идеальным (расчетным) напряжением, соответствующим заданному углу поворота ротора (рис. 11.9). Сравнение напряжений осуществляется компенсационным методом.
Допустимые погрешности угломерного устройства, в которое устанавливается ВТ, и делителя напряжения должны быть не более значений, приведенных в табл. 11.5.
Поворачивая ротор испытуемого ВТ в зоне совмещения нулевых отметок, добиваются минимального значения напряжения по шкале вольтметра V (остаточная ЭДС) и фиксируют показание по шкале угломерного устройства, принимая его за «нулевое». Компенсация схемы производится поворотом ротора компенсирующего ВТ (КВТ) и изменением сопротивления фазирующего резистора Яф. При каждой новой установке переключателей делителя напряжения ДН поворотом ротора испытуемого СКВТ устанавливают минимальное значение напряжения по шкале вольтметра К и по шкале угломерного устройства фиксируют отклонение фактического угла. Погрешность, %, в каждой фиксированной точке определяется из соотно-
Таблица 11.5. Допустимые погрешности элементов схемы
|
Элемент схемы |
Допустимая погрешность при классе точности ВТ |
||||||
|
0,005 |
0,01 |
0,02 |
0,05 |
0,1 |
0,2 |
0,3 |
|
|
Угломерное устройство, утл. с, не более Делитель напряжения. % |
2 0,01 |
5 0,01 |
10 0,002 |
10 0,015 |
10 0,01 |
60 0,02 |
60 0,02 |
в = (&UBbJUBblxmax) ■ 100 sin Да • 100,
где Да — погрешность, рад.
По окончании измерений проверяют соответствие нуля шкалы угломерного устройства нулю испытуемого ВТ.
Проверка погрешности отображения линейной зависимости принципиально не отличается от рассмотренной ранее проверки погрешности отображения синусной зависимости. Эту проверку и проверку остаточной ЭДС ЛВТ осуществляют по схеме, приведенной на рис. 11.10. Допустимые погрешности угломерного устройства и делителя напряжения аналогичны приведенным в табл. 11.5.
Квадратурная составляющая выходного напряжения ЛВТ компенсируется специальным компенсирующим устройством, включающим в себя фазовращатели ВТ1 с фазо-сдвигающим RC-контуром и В Т2. Параметры на все элементы схемы измерения устанавливаются стандартами на отдельные типы ЛВТ.
Контроль параметров сельсинов. Проверка изменения переходного сопротивления контактов сельсинов выполняется так же, как и у ВТ.
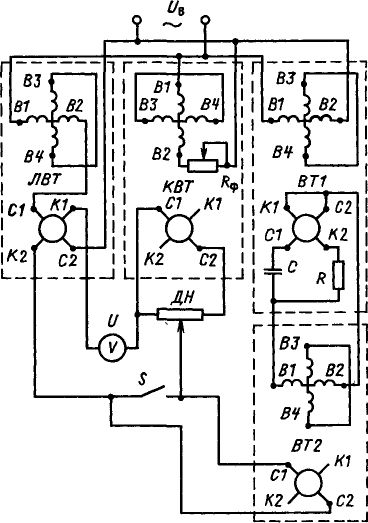
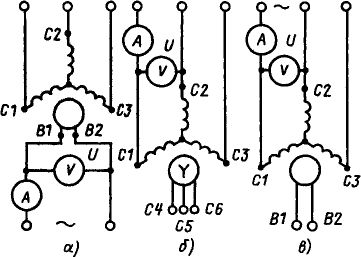
Рис. 11.11. Схема проверки потребляемого
тока (потребляемой мощности) сельсинов:
« - СД и СПИ; б-СДД и СПДИ; в - СПТ
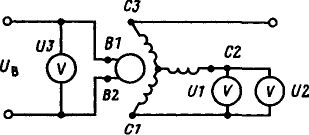
Рис. 11.10. Схема для проверки погрешности отображения линейной зависимости ЛВТ
Рис. 11.12. Схема проверки максимальных значений напряжения синхронизации сельсинов (СД и СПИ)
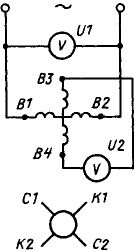
Потребляемый ток (потребляемую мощность) сельсинов следует проверять: сельсинов-датчиков (СД) и сельсинов-приемников индикаторных (СПИ) — по схеме рис, 11.11,а; сельсинов-датчиков дифференциальных (СДД) и сельсинов-приемников дифференциальных индикаторных (СПДИ) — посхемерис. 11.11,6; сельсинов-приемников трансформаторных (СПТ) — по схеме рис. 11.11, в при таком положении ротора, когда потребляемый ток наибольший.
Проверку максимальных значений напряжения синхронизации (рис. 11.12) осуществляют при номинальном напряжении питания для СД и СПИ и при напряжении возбуждения, равном максимальному выходному напряжению для СПТ. Максимальное значение напряжения синхронизации определяют по формуле
Uсинхрвгах = 2L/2 — U\ .
Другое максимальное значение напряжения синхронизации находят после поворота ротора на 180°. Также поступаю-»- при измерении максимальных значений напряжений синхронизации на клеммах (выводах) С2, СЗ и С/, СЗ вторичной обмотки.
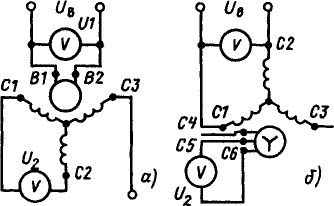
Рис. 11.13. Схема проверки асимметрии нулевых точек и остаточной ЭДС в нулевых
точках: а-СД и СПТ; б - СДД
Проверку максимальных значений напряжений синхронизации допускается производить и одним вольтметром, при этом его входное сопротивление должно быть не менее 2-103 Ом/В.
Для проверки асимметрии нулевых точек и остаточных ЭДС в нулевых точках сельсинов их включают по схемам, приведенным на рис. 11.13. На обмотку возбуждения СД и СПТ подают соответственно напряжение, равное номинальному напряжению питания для СД и максимальному вторичному напряжению для СПТ. Поворачивая ротор сельсина, установленного в угломерное устройство (погрешность которого должна быть не более 10"), в зоне совмещения нулевых отметок находят такое его положение, при котором показание вольтметра U2 будет минимальным (остаточная ЭДС). Показание по шкале угломерного устройства фиксируют как «нулевое» и, развернув ротор примерно на 180° от первой нулевой точки, доворачивают его до положения, когда показание вольтметра снова будет минимальным (вторая нулевая точка). Подключая вольтметр поочередно к выводам С2, СЗ; СЗ, С1,
аналогично определяют остальные четыре нулевые точки. В каждой нулевой точке по шкале угломерного устройства определяют отклонение от угла, кратного 60°. Одновременно- по вольтметру определяют остаточную ЭДС.
Таким же образом производится контроль асимметрии нулевых точек и остаточных ЭДС в нулевых точках СДД. Восемнадцать нулевых точек СДД контролируются поочередной подачей максимального напряжения синхронизации на выводы С1,С2; С2, СЗ и С1, СЗ первичной обмотки.
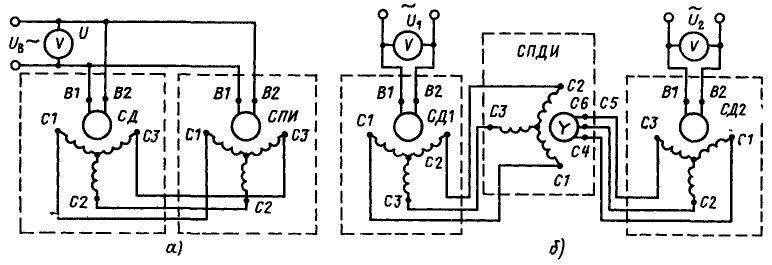
Погрешность следования СПИ в индикаторной дистанционной передаче и амплитуду колебания стрелки на его валу следует проверять по схеме, показанной на рис. 11.14, а. Сельсин-датчик устанавливают в угломерном устройстве, обеспечивающем отсчитывание с погрешностью не более 2'. Сельсин-приемник индикаторный устанавливают в центре диска диаметром 250 — 300 мм, имеющего круговую шкалу с ценой деления 30'. На оси СПИ укрепляют сбалансированную стрелку с нониусом, позволяющим производить отсчитывание по шкале с погрешностью не более 6' (0,Г).
На обмотки сельсинов подают напряжение возбуждения и ротор СД поворачивают до тех пор, пока стрелка СПИ не установится в нулевое положение по шкале. Ротор СД поворачивают сначала вправо, а затем влево в пределах 0—360° ступенями по 10°. При каждом фиксированном положении ротора СД по шкале СПИ определяют угол поворота его ротора. При этом одно и то же угловое положение необходимо оценивать одинаково как при правом, так и при левом направлении вращения ротора, т. е. если получено показание 10°30' при повороте вправо и влево, то в обоих случаях погрешность будет —30'.
Рис. 11.14. Схемы проверки погрешности следования сельсинов в индикаторной дистанционной передаче: я-СПИ; 6-СПДИ
При каждом установленном положении ротора СД одновременно измеряют амплитуду колебаний стрелки на валу СПИ.
За погрешность следования в индикаторной дистанционной передаче принимают полусумму абсолютных значений наибольших отклонений разных знаков угла поворота ротора СПИ от углов поворота ротора СД.
Погрешность следования СПДИ в индикаторной дистанционной передаче следует проверять по схеме, указанной на рис. 11.14,6. Проверку проводят аналогично проверке погрешности следования СД и СПИ. При проверке определяют отклонение угла поворота ротора СПДИ от угла поворота (через 10°) ротора СД1 или СД2 при заторможенном роторе СД2 или СД1 соответственно. Отклонение угла поворота ротора СПДИ может быть также проверено и относительно суммы углов поворота одновременно роторов СД1 и СД2. За погрешность следования принимают погрешность, рассчитанную, как это указано для СД и СПИ.
Контроль параметров датчиков угла. Контроль изменения переходного сопротивления контактов датчика угла (ДУ) проводится так же, как и у ВТ. Ток возбуждения следует проверять по схеме рис. 11.15 при номинальном напряжении возбуждения.
Амперметр А и вольтметр VI должны быть класса не ниже 1,5. По этой же схеме проверяется остаточное напряжение ДУ. При этом датчик устанавливают в угломерном устройстве, позволяющем осуществить поворот ротора датчика на любой угол с погрешностью не более 10" для классов 0,05 — 0,2 и Г для классов 0,3 — 1,5. На обмотку возбуждения подают номинальное напряжение. Поворотом ротора датчика в зоне совмещения нулевых отметок находят такое положение, при котором значение напряжения \}г будет наименьшим — остаточное напряжение. Показание на шкале угломерного устройства фиксируют как нулевое.
Для измерения максимального выходно-
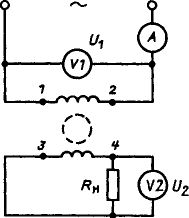
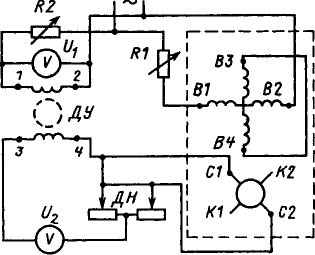
Рис. 11.15. Схема проверки тока возбуждения датчиков угла
Рис. 11.16. Схема проверки отображения линейной зависимости датчиков угла
го напряжения ротор ДУ поворачивают от нулевого положения на максимальный угол в пределах диапазона линейности характеристики конкретного типа ДУ и снимают показание вольтметра V2.
Проверку погрешности отображения линейной зависимости ДУ выполняют по схеме рис. 11.16. Датчик устанавливают в угломерное устройство. Подают напряжение на обмотки возбуждения ДУ и компенсирующего вращающегося трансформатора ВТ1 (квадратурная обмотка закорочена). Поворотом ротора датчика находят нулевое положение угломерного устройства по минимуму напряжения. Переключатели делителя ДН устанавливают в положения, указанные в стандартах технических условий на конкретные типы ДУ, ротор ДУ поворачивают на угол, заданный в тех же стандартах. Поворотом ротора ВТ1 и изменением сопротивления фазирующих резисторов RJ, R2 добиваются наименьшего показания вольтметра V2 (компенсация схемы). Эту операцию повторяют для каждой новой установки переключателей делителя ДН и отсчитывают отклонение угла поворота ротора по шкале угломерного устройства от расчетных значений и определяют погрешность по формулам, указанным в стандартах на конкретные типы ДУ.
Погрешность делителя напряжения не должна превышать 0,001 % при проверке датчика класса 0,05 и 0,01% для класса 0,1; 0,2; 0,3; 0,5; 1 и 1,5.
Контроль параметров фазовращателей. Проверка надежности контактирования между щетками и контактными кольцами фазовращателей (ФВ) проверяется с помощью осциллографа. При вращении ротора с частотой не более 10 об/мин не должно быть пропадания или разрыва синусоиды на экране осциллографа.
|
Таблица 11.6. Рекомендации |
по выбору методов проверки фазовой |
погрешности ФВ |
||||||
|
Метод |
диапазоне частот напряжения возбуждения |
классе точности ФВ* |
||||||
|
0,4-400 |
0,4-1 |
1,0-10 |
10-120 |
0,1, 0,2; |
2; 3; 5; |
60, 120; |
||
|
кГц |
МГц |
МГц |
МГц |
0,5; 1; 2 |
10; 20 |
30 |
300; 600 |
|
|
Фазометра |
+ |
+ |
+ |
+ |
— |
_ |
+ |
+ |
|
Фазовой конс- |
+ |
+ |
+ |
— |
+ |
+ |
+ |
— |
|
танты |
||||||||
|
Измерение ко- |
+ |
+ |
+ |
+ |
— |
+ |
+ |
+ |
|
эффициента |
||||||||
|
амплитудной |
||||||||
|
модуляции |
||||||||
|
^вых |
||||||||
|
Сравнения с |
+ |
+ |
- |
- |
+ |
+ |
+ |
+ |
|
эталонным ФВ |
||||||||
|
цифровых ин- |
||||||||
|
тервалов вре- |
||||||||
|
мени |
||||||||
* Класс точности ФВ численно равен полусумме значений наибольших положительной и отрицательной фазовых погрешностей, выраженных в минутах.
Примечание. Знак « + » указывает, что метод применим, знак « —» — что метод применять не следует
Для проверки фазовой погрешности ФВ применяют несколько методов, которые выбирают в зависимости от диапазона частот напряжения возбуждения и классов точности ФВ (табл. 11.6).
При проверке фазовой погрешности методом фазометра ФВ устанавливают в угломерное устройство, обеспечивающее установленную точность измерения. Выводы ФВ подключают к измерительным выводам фазометра. На ФВ подают напряжение возбуждения и производят настройку фазосдвигаю-щего контура способами, указанными в стандартах на конкретные типы ФВ.
Ротор ФВ поворачивают на углы, значение которых также устанавливается в стандартах на конкретные типы ФВ. При каждом угле поворота ротора определяют фазовую погрешность как разность показаний фазометра и угломерного устройства.
Контроль параметров тахогенераторов. Крутизну выходного напряжения тахогенераторов постоянного тока (ТГП) вычисляют как отношение выходного напряжения, мВ, измеренного при номинальной частоте вращения, к номинальной частоте вращения, об/мин. Значения крутизны определяют при правом и левом вращениях и принимают наименьшее значение.
Асимметрию выходного напряжения, %, вычисляют как отношение разности выходных напряжений при правом и левом вра-
щениях с номинальной частотой к полусумме этих напряжений.
Нелинейность выходного напряжения, %, вычисляют как отношение разности выходного напряжения, измеренного при данной частоте вращения и напряжения, рассчитанного по крутизне при этой же частоте вращения, к напряжению при номинальной частоте вращения.
Для проверки крутизны выходного напряжения тахогенератора переменного тока ротор тахогенератора приводят во вращение с частотой, указанной в стандартах на отдельные типы тахогенераторов. Измеряют выходное напряжение вольтметром класса не ниже 2,5 с входным сопротивлением не менее 0,5 мОм. Затем крутизну выходного напряжения вычисляют так же, как для ТГП.
Проверку остаточной ЭДС и переменной составляющей остаточной ЭДС тахогенератора переменного тока проводят по основной гармонике. Обмотка возбуждения тахогенератора переменного тока не должна иметь гальванической связи с источником питания, а корпус тахогенератора должен быть заземлен. При медленном (не более 1 об/мин) повороте ротора в пределах одного оборота измеряют максимальное и минимальное значения остаточной ЭДС. Переменную составляющую остаточной ЭДС определяют как разность между максимальным и минимальным значениями.
Проверку пульсаций выходного напряжения ТГП проводят с помощью магнитоэлектрического осциллографа (например, Н-Ю5). По осциллограмме определяют максимальное, минимальное и среднее значения выходного напряжения. Пульсацию выходного напряжения вычисляют как отношение разности максимального и минимального значений выходного напряжения к удвоенному среднему значению.
Проверку сопротивления обмоток ТГП и тахогенератора переменного тока постоянному току проводят мостом постоянного тока класса не ниже 1. У ТГП измеряют сопротивление цепи якоря со щетками.
Проверку нелинейности выходного напряжения тахогенератора переменного тока, фазовой погрешности при изменении частоты вращения, амплитудной погрешности и фазовой погрешности от собственного нагрева проводят компенсационным методом.