Содержание
Предыдущий § Следующий
11.3. Применение и эксплуатация электрических машин малой мощности для систем автоматики
Правильность выбора и применения ЭМММ является важным условием, обеспечивающим требуемые технические и эксплуатационные характеристики систем автоматики и прежде всего такие, как точность, чувствительность, быстродействие, надежность и др.
11.3.1. Выбор электродвигателя для систем автоматики
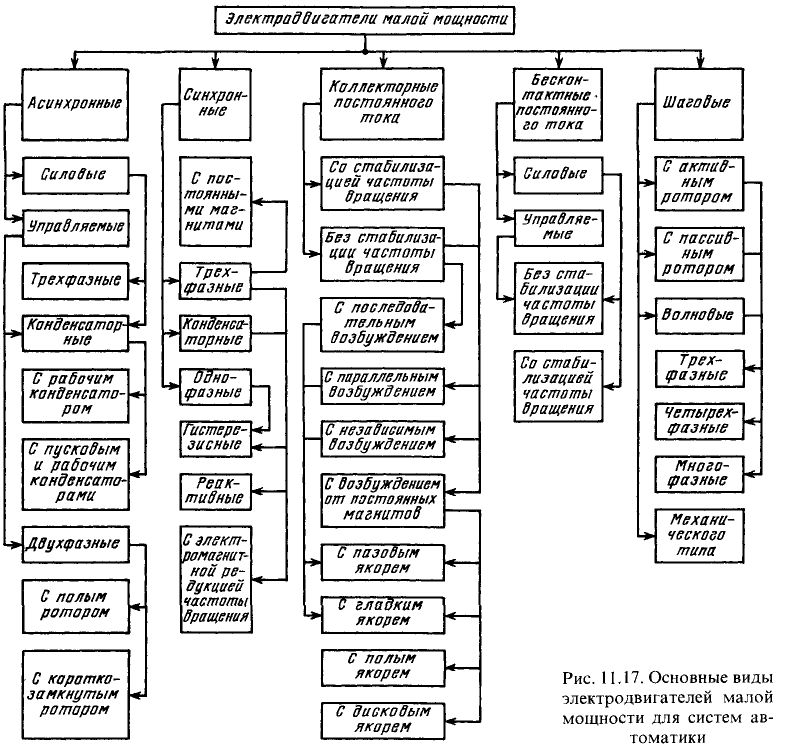
При выборе электродвигателей (рис. 11.17) на основании анализа требований, предъявляемых к аппаратуре, составляется перечень требований к их основным электромеханическим и эксплуатационным параметрам: напряжению питания и допускаемому его отклонению, полезной мощности и моменту на валу, частоте вращения и ее стабильности, пусковому моменту, быстродействию, напряжению трогания, КПД, режиму работы, долговечности и сохраняемости, массе и габаритным размерам, стойкости к воздействию механических нагрузок и климатических факторов.
В тех случаях, когда выбранный электродвигатель не обладает устойчивостью ко всем эксплуатационным факторам, характерным для данной аппаратуры, необходимо предусмотреть технические меры защиты от воздействующего фактора (амортизацию, герметизацию, дополнительный теплоотвод, экранирование, токовую защиту и т. п.).
Основными вопросами, которые необходимо решить при выборе электродвигателя для аппаратуры, являются выбор типа двигателя с электромеханическими свойствами, отвечающими характеру нагрузки, и определение номинальной мощности электродвигателя. Мощность электродвигателя выбирают, исходя из необходимости обеспечить выполнение заданной работы электропривода при соблюдении нормального теплового режима и допустимой механической перегрузки двигателя. При этом следует учитывать нагрузку привода не только в установившемся режиме работы, но и во время переходных режимов. Важное значение имеет также цикличность работы привода, которая характеризуется графиком частоты вращения при заданном графике статического момента приводимого механизма. По графику частоты вращения определяют ускорение для любого момента времени, затем момент инерции всех вращающихся частей механизма, приведенный к валу двигателя, и вычисляют значения динамических моментов. Алгебраическое сложение статических и динамических моментов нагрузки позволяет получить график полного момента, по которому и рассчитывают мощность двигателя.
Графики частоты вращения и момента, развиваемого двигателем, полностью определяют его нагрузку. По этим данным могут быть построены графики потребляемого двигателем тока, полезной и потребляемой мощности, потерь и т. д. На рис. 11.18 приведен пример нагрузочной диаграммы привода.
Для лучшего использования двигателя принимают номинальный момент, близкий к среднему. Учитывая, что двигатели имеют определенную перегрузочную способность, необходимо предусмотреть проверку их на перегрузку. При этом должно выполняться следующее условие: Мтах sg /сД0ПМН0М, где кЛ0П — коэффициент допустимой перегрузки; Мном — номинальный момент двигателя.
У коллекторных двигателей постоянного тока перегрузочная способность ограничивается условиями коммутации, а значения максимального момента двигателей обычно в 3 — 4 раза выше номинального.
Двигатели постоянного тока могут нормально функционировать при условии обеспечения необходимого качества подаваемой электроэнергии, которое определяется стабильностью напряжения питания во времени и пульсацией мгновенного значения амплитуды питающего напряжения. Существующие электродвигатели работают нормально при изменении напряжения питания в среднем на ±(10 — 25)% номинального значения (более
точные данные на каждый тип электродвигателя указаны в технической документации); коэффициент пульсации напряжения источника питания, т. е. отношение дей-
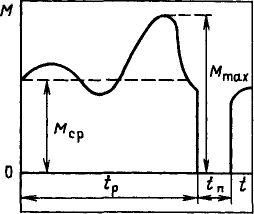
Рис. 11.18. Вариант нагрузочной диаграммы
привода:
Мср, Мтах - среднее и максимальное значения
нагрузочного момента; lp, tn — время работы и
паузы
ствующего значения всех гармонических составляющих выпрямленного напряжения к номинальному значению не должен быть более 5%.
На значения параметров асинхронных двигателей (АД) существенное влияние оказывают отклонения от номинальных значений параметров электроэнергии (амплитуды, фазы, частоты) и для конденсаторных АД — емкости конденсатора.
При изменении амплитуды и частоты напряжения питания оценка изменения основных параметров АД может быть произведена по приближенным уравнениям. Относительное изменение электромагнитного вращающего момента
т= м 2bHOM(k2u/k?)
Л/„ом sKp/(kfs) + fe/s/sKp '
где Ьном - кратность максимального момента при номинальных значениях напряжения
Как правило, двигатели приводят в движение исполнительный механизм через систему механических передач (редукторы, муфты), обладающую собственными потерями энергии на трение. При этом КПД редукторов может изменяться в зависимости от их качества, передаваемого момента и передаточного отношения в пределах от 50 до 99 %, поэтому при определении мощности приводного двигателя необходимо учитывать КПД системы передач.
В ряде случаев выбор мощности двигателя производят по нагреву, а затем его проверяют по перегрузочной способности. При этом следует иметь в виду, что превышение температуры электродвигателя не должно быть выше допустимой температуры.
При выборе электродвигателей для аппаратуры, работающей в условиях глубокого вакуума, в контакте с газообразными или жидкими агрессивными и взрывоопасными средами и для аппаратуры, критичной к воздействию электромагнитных радиопомех и помех по цепям питания, а также для аппаратуры с длительными сроками службы следует отдавать предпочтение бесконтактным электродвигателям постоянного тока.
При монтаже электродвигателей в аппаратуре крепление их должно производиться по посадочному месту. Наиболее распространенными видами крепления являются: фланцевое, за корпус и на лапах.
Крепление электродвигателей фланцевого исполнения выполняется стяжными винтами или накладками, крепящими фланец к корпусу объекта.
Крепление за корпус должно производиться за наружную поверхность корпуса электродвигателя с помощью охватывающих его металлических деталей (хомутиков, лент, стаканов и т. п.). Не допускается производить крепление деталями из неметаллических материалов. Крепежные детали электродвигателей, корпус которых выполнен из магнитотвердых материалов (постоянный магнит), должны выполняться без применения ферромагнитных материалов.
Для механического соединения вала электродвигателя с рабочим механизмом в единую кинематическую схему применяются шестерни или муфты, насаживаемые на выходной конец вала. Форма конца вала может быть цилиндрическая гладкая, цилиндрическая с резьбой под гайку. Детали, укрепляемые на валу, должны быть динамически отбалансированы. Допустимая остаточная неуравновешенность деталей и момент инер-
ции нагрузки, приведенный к валу электродвигателя, указываются в технической документации.
Подключение электродвигателей к источнику питания должно осуществляться в строгом соответствии с маркировкой выводных концов и указаниями технических условий, инструкции по эксплуатации илл паспорта. Для маркировки выводных концов применяются цветные провода, буквы, цифры и знаки полярности на клеммной колодке. Особое внимание следует обратить на соблюдение полярности подаваемого напряжения, так как у электродвигателей с электронными регуляторами частоты вращения и коммутаторами обратная полярность питающего напряжения приводит к выходу из строя транзисторов.
Выводные концы электродвигателей присоединяются к сети питания с помощью пайки. Во избежание обрыва или повреждения изоляции выводных концов не следует допускать их резких перегибов и скручивания.
11.3.2. Выбор электровентиляторов для охлаждения аппаратуры
Для охлаждения аппаратуры применяются в основном осевые и центробежные электровентиляторы (ЭВ). Аэродинамическая характеристика осевых ЭВ Н = f(Q) имеет провал на начальном участке — зону неустойчивой работы. Поэтому осевые ЭВ имеют относительно большую производительность Q при малых напорах Н и могут применяться в аппаратуре большого объема с малым аэродинамическим сопротивлением, а также для локального охлаждения наиболее нагретых элементов аппаратуры.
Центробежные ЭВ характеризуются большим давлением при относительно малых расходах воздуха. Они применимы в системах с большим аэродинамическим сопротивлением сети.
Общая потеря давления в простом воздухопроводе определяется суммой потерь давления на всех его участках. Характеристика сложной сети может быть получена сложением характеристик отдельных участков и ответвлений. Характеристика последовательно соединенных участков представляет собой сумму ординат Н, а параллельно соединенных — сумму абсцисс Q. Характеристику строят по точкам, получаемым в результате расчета при различных расходах <2, или снимают опытным путем при продувке макета воздухопровода.
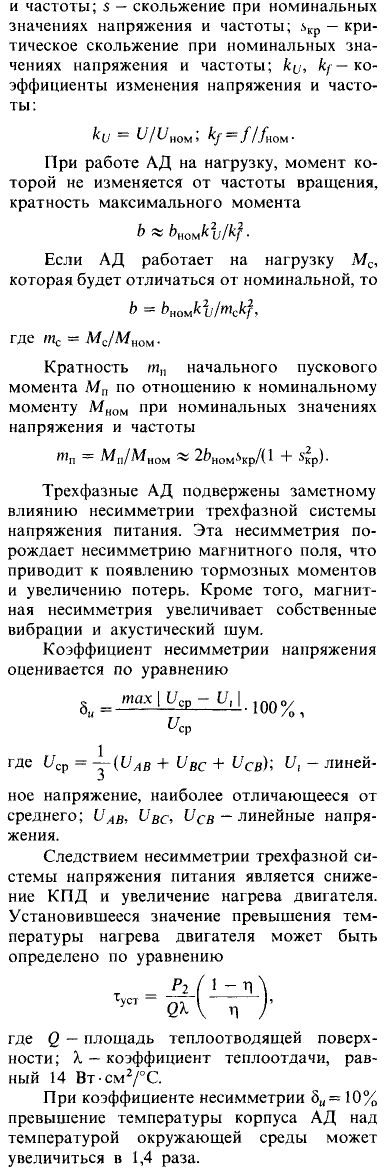
По характеристике сети анализируют совместную работу ЭВ и сети. Для этого на характеристику ЭВ, построенную при постоянной угловой частоте вращения в координатах Н — Q, следует наложить характеристику сети (рис. 11.19). Точка пересечения двух кривых (рабочая точка) определит давление Ht и производительность Ql ЭВ при его работе в данной аэродинамической сети. Рабочей точке соответствует условие, когда производительность равна расходу воздуха, проходящего через сеть, а давление, создаваемое ЭВ, — потере давления в сети при этом расходе.
Зная производительность ЭВ, по его полной характеристике можно определить значения мощности и КПД г| (рис. П.20). Для этого через рабочую точку следует провести вертикальную прямую до пересечения ее с кривыми P=f(Q) и г|=/(6), полученные точки А и В определяют соответствующие значения мощности и КПД по шкалам Р и т|. Для выбора ЭВ в конкретных случаях применения с учетом необходимой рассеиваемой тепловой мощности можно использовать специальную номограмму (рис. 11.21), содержащую сводную информацию о рабочих участках аэродинамических характеристик основных серий электровентиляторов малой мощности.
Зная тепловую мощность, которую необходимо рассеять, и перепад температур между охлаждаемой поверхностью и воздухом, по верхней части номограммы определяем точку пересечения а, затем проводя из точки а вертикальную линию, пересекающую нижнюю часть номограммы, можно подобрать подходящую серию и тип ЭВ по сочетаниям значений Q и Н, получаемых в точках пересечения вертикальной линии а и характеристик различных серий ЭВ.
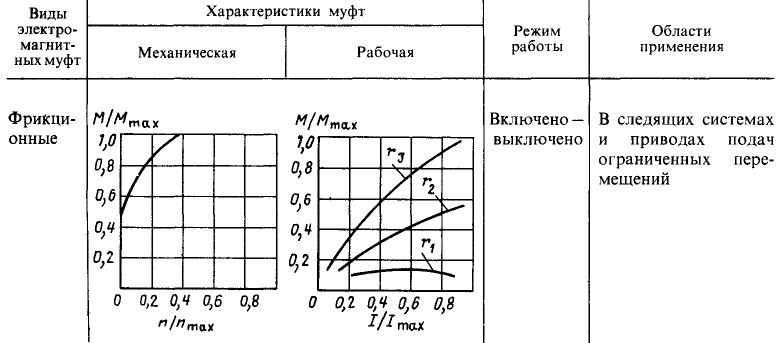
11.3.3. Выбор электромагнитных муфт
Виды и типы электромагнитных муфт выбирают, исходя из требований к функциональным и массообъемным характеристикам создаваемого электропривода. При этом, как правило, возникает необходимость поиска оптимального сочетания положительных свойств и недостатков, присущих различным видам муфт в интересах решения конкретной задачи. Исходная информация для принятия предварительных решений представлена в табл. 11.7.
Типичный вид зависимостей, характеризующих механические и рабочие свойства основных видов электромагнитных муфт,
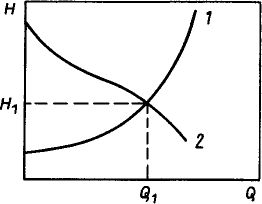
Рис. 11.19. Характеристика электровентилятора (7) и аэродинамическая характеристика сети (2)
О q, 4
Рис. 11.20. Характеристики электровентилятора : Я— давление, Р — потребляемая мощность, г| — КПД, Q — производительность , /, 2 — то же, что и на рис 11 19
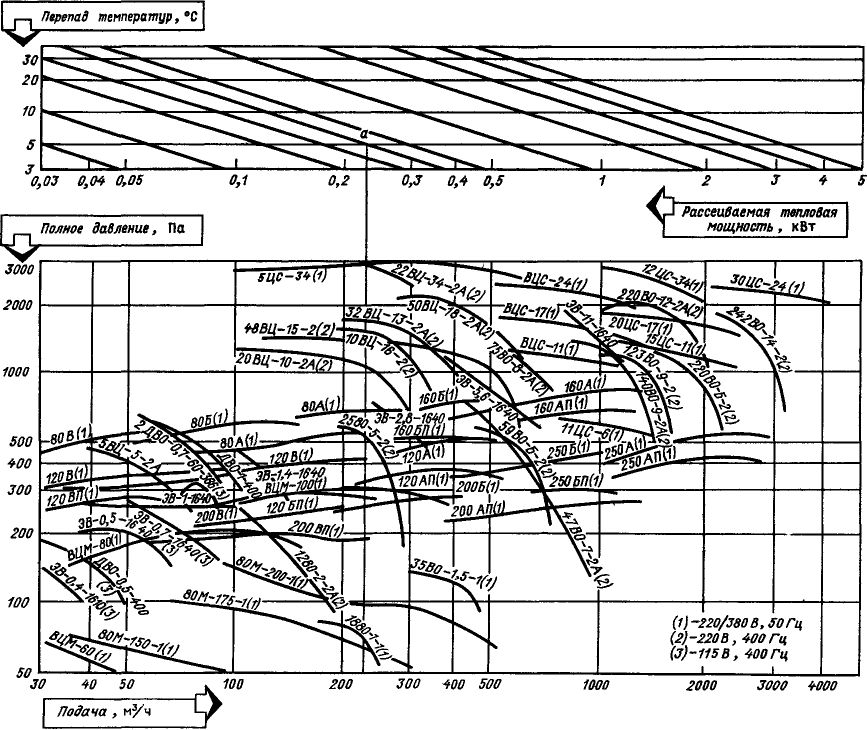
Рис. 11.21. Номограмма для выбора электровентиляторов
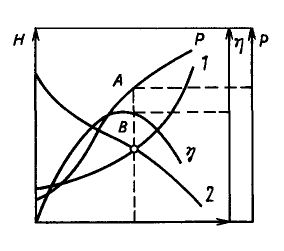
Таблица 11.7. Сравнительная характеристика основных свойств различных видов электромагнитных муфт
Таблица 11.8. Характеристики муфт с электромагнитным управлением
Продолжение табл. 11.8
Примечание. г\ — r-i, — сопротивление обмотки управления; ц — 14 — ток управления.
представлен в табл. 11.8. По этим данным можно в первом приближении оценить влияние муфты на работу системы.
11.3.4. Выбор и применение информационных электрических машин
Одним из главных критериев выбора ИЭМ (рис. 11.22) является точность, так как следящие системы и системы дистанционных передач, построенные на этих изделиях, относятся к категории прецизионных систем. Вместе с тем из этого не следует, что во всех случаях применения ИЭМ необходимо стремиться к использованию только высокоточных типов ИЭМ или ИЭМ высших классов точности. Точностные возможности тех или иных изделий необходимо рассматривать применительно к конкретным схемным решениям, месторасположению в схеме, условиям и режимам работы.
В связи с общей тенденцией микроминиатюризации аппаратуры возрастают требова-
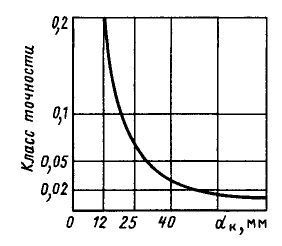
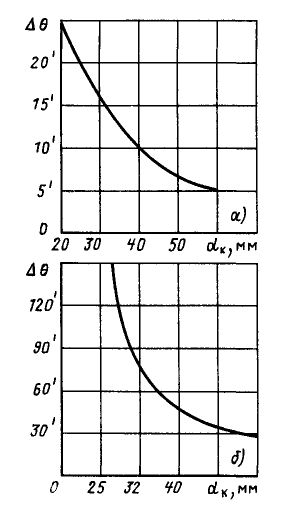
ния к габаритным и массообъемным характеристикам изделий, в том числе и к ИЭМ. Так как с уменьшением габаритных размеров точность этих изделий снижается, предварительную оценку соответствия их характеристик можно произвести, воспользовавшись кривыми для ВТ и сельсинов, приведенными на рис. 11.23 и 11.24.
Для обеспечения требований к надежности более предпочтительным является применение бесконтактных конструкций ИЭМ. Однако при этом следует учитывать, что точность бесконтактных изделий несколько хуже, чем контактных.
При выборе ИЭМ необходимо стремиться к тому, чтобы удовлетворить технические требования к аппаратуре без дополнительных мер защиты от внешних воздействующих факторов.
Особое внимание при выборе номенклатуры ИЭМ должно быть уделено вопросам унификации, которые для каждого типа аппаратуры необходимо решать комплексно.
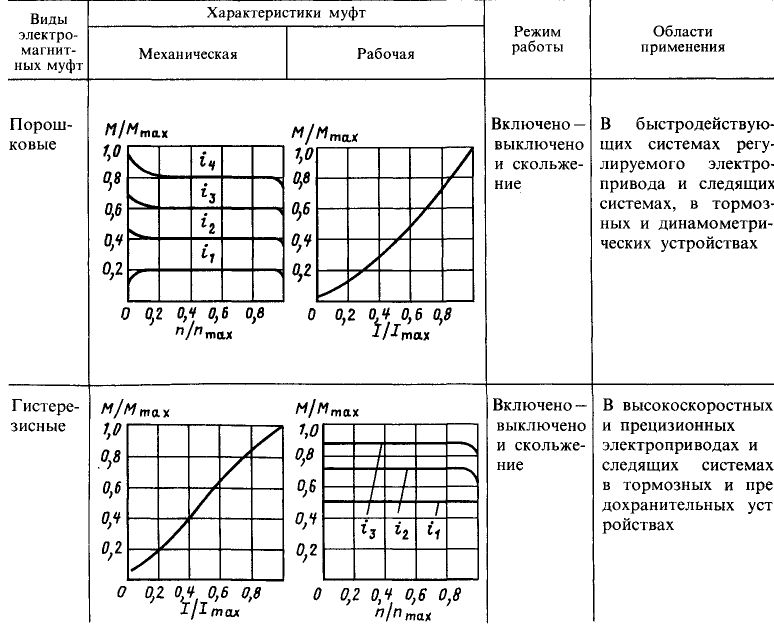
Рис. 11.22. Виды информационных электрических машин
Применение ограниченного числа серий и типов ИЭМ позволит упростить настройку и наладку аппаратуры, облегчит проведение регламентных работ и комплектацию ЗИП.
Для ИЭМ наиболее рациональным является фланцевое крепление. Не допускается крепление ВТ, ФВ, ДУ и сельсинов за корпус, так как это может привести к нарушению равномерности воздушного зазора, а следовательно, и к потере точности.
Дополнительные погрешности механического происхождения могут повлечь за собой неточность сочленения валов ИЭМ с валами приводных двигателей (несоосность сочленения валов обычно не должна превышать 0,01 мм). Значения этих погрешностей в основном определяются конструктивными особенностями применяемых соединительных устройств, в качестве которых получили распространение устройства с центрирующей втулкой и типа крестовой муфты, позволя-
ющие существенным образом уменьшить влияние эксцентриситета, а также специальные муфты. Во избежание увеличения погрешностей все конструктивные элементы (стрелки, контактные барабанчики, поводки и т. п.), которые устанавливаются на оси сельсинов-приемников, должны быть тщательно отбалансированы.
Подключение ВТ и сельсинов к источникам питания и электрические соединения обмоток производят в соответствии с их электрическими схемами.
При работе ВТ в каскадных схемах счетно-решающих устройств питающее напряжение их может как иметь постоянную амплитуду, так и изменяться в достаточно широких пределах. Вследствие того, что при малых значениях напряжений кривая намагничивания пермаллоя 79НМ более линейна, чем пермаллоя 50Н и электротехнической стали, при построении каскадных схем (для
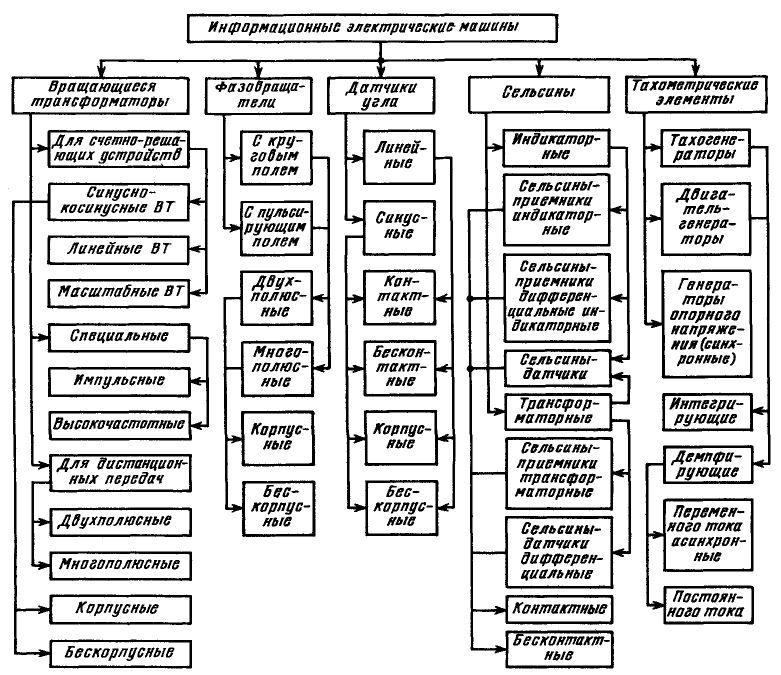
Рис. 11.23. Зависимость класса точности ВТ от внешнего диаметра корпуса
уменьшения дополнительных погрешностей) рекомендуется использовать в начале каскада ВТ с магнитопроводом из пермаллоя 50Н и электротехнической стали, а все последующие ВТ — с магнитопроводом из пермаллоя 79НМ.
Уменьшение погрешности каскадных схем может быть достигнуто также увеличением отношения ZH/ZBbIx. Для этого необходимо, чтобы каждый последующий (питаемый) ВТ в каскаде имел выходное сопротивление больше, чем предыдущий (питающий) ВТ, или же чтобы коэффициент трансформации питающего ВТ был существенно меньше 1. Ориентировочно соотношение между значениями входных сопротивлений ВТ в каскадной схеме определяется из условия
^вх2 ^ -^М^вх 1'
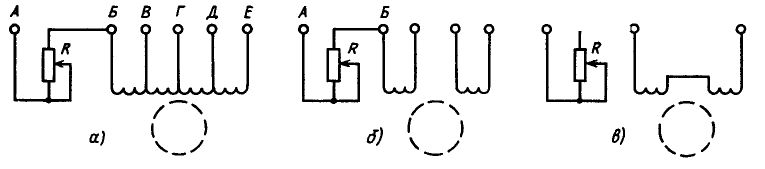
где ZBXJ и ZBX2 — входные сопротивления предыдущего и последующего ВТ; к — коэффициент трансформации предыдущего ВТ. При построении каскадных схем все применяемые ВТ должны быть отсиммет-рированы, для этой цели рекомендуется применять специальные симметрирующие устройства. На рис. 11.25 приведены электрические схемы некоторых типов симметрирующих устройств, которые обеспечивают симметрирование ВТ в диапазоне частот 400-1000 Гц.
Рис. 11.24. Зависимости погрешности следования сельсинов от наружного диаметра
корпуса:
а — трансформаторные сельсины, б — индикаторные сельсины
Из-за непостоянства входного сопротивления СКВТ в режиме ЛВТ может быть использован только в начале каскадной схемы. Для реализации линейных функциональных зависимостей безотносительно от месторасположения в каскаде рекомендуется применять ЛВТ типа ЛВТ-5Я.
Регулировка масштабов осуществляется при помощи МВТ, которые могут быть включены в любом месте каскадной схемы. Более целесообразно МВТ размещать в начале каскада, так как в этом случае он работает при питающем напряжении с постоянной амплитудой и не вносит дополнительных погрешностей. Месторасположение МВТ не должно затруднять симметрирова-
В Г Д А _____Б Д
Рис. 11.25. Электрические схемы симметрирующих устройств для каскадных схем применения ВТ: а - СУ-463, б - СУ-464. « - СУ-465, СУ-466
ние схемы, поэтому необходимо, чтобы его выходное сопротивление было минимальным и не изменялось при установке масштаба.
Трансформаторная дистанционная передача с применением ВТ представляет собой частный случай каскадной схемы. Количество ВТ-приемников (их может быть от единиц до десятков штук) определяется мощностью, а следовательно, и габаритными размерами ВТ-Датчика, причем часть из них может находиться В заторможенном режиме, а часть — в режиме слежения. Уменьшение взаимного влияния ВТ-приемников достигается вторичным симметрированием, однако при этом крутизна выходного сигнала также уменьшается. Относительное постоянство крутизны при большом числе ВТ-приемников обеспечивается применением ВТ-датчиков с малым выходным сопротивлением и ВТ-приемников с большим входным сопротивлением. Для увеличения крутизны выходного сигнала обмотки управления ВТ-приемника могут быть включены последовательно, но при этом точность дистанционной передачи несколько ухудшается. Уменьшению погрешности трансформаторной дистанционной передачи в большинстве случаев способствует первичное симметрирование ВТ-датчика, которое обычно производится замыканием накоротко квадратурной обмотки.
В трансформаторной и индикаторной дистанционной передачах с применением сельсинов при небольшом числе параллельно работающих приемников целесообразно применять бесконтактные конструкции этих изделий. При большом числе приемников (что имеет место в разветвленных системах трансформаторных и индикаторных дистанционных передач, а также системах смешанного типа) в случае необходимости в качестве датчика могут применяться кон-
0 100 200 300
р?,мВ-А/град2
Рис. 11 26 Зависимости количества индикаторных (кривая 1) и трансформаторных (кривая 2) сельсинов-приемников, работающих от одного датчика от удельной мощности по поперечной оси сельсина-датчика
тактные СД, имеющие большую удельную мощность по поперечной оси, чем бесконтактные. Вследствие взаимного влияния параллельно работающих СП, которое проявляется в уходе их положения согласования (при рассогласовании одного из приемников), не рекомендуется применять в трансформаторных дистанционных передачах сельсины с явнополюсным ротором.
Для обеспечения возможно большей точности необходимо стремиться к тому, чтобы все СП индикаторной дистанционной передачи имели одинаковые электрические параметры и характеристики, а также одинаковую нагрузку.
При рассмотрении параллельной работы сельсинов возникает необходимость в определении числа СП, которые могут быть подключены к тому или иному датчику. Для решения этого вопроса с приемлемой для практики точностью можно воспользоваться графиками, приведенными на рис. 11.26. В связи с тем, что при параллельной работе СП в индикаторном режиме их
0 100 200
/^мВ-А/град*
Рис 11 27. Зависимости удельного синхронизирующего момента контактных (а) и бесконтактных (б) СПИ от удельной мощности по поперечной оси датчика при различном количестве п приемников, подключаемых к одному датчику
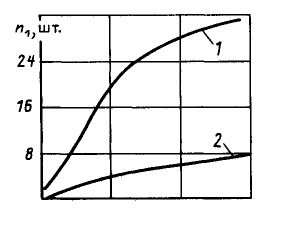
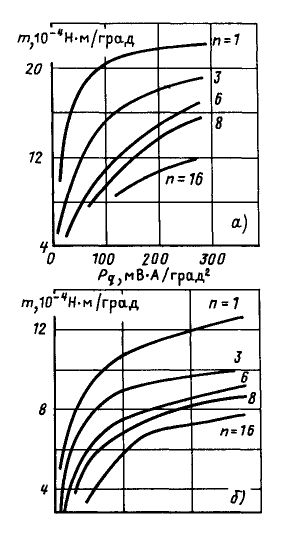
Рис. 11.28. Зависимости крутизны тахогене-
раторов от величины диаметра корпуса: / — асинхронные; 2 — постоянного тока с полым якорем; 3 — постоянного тока с зубцовым якорем
Рис. 11.29. Зависимости класса точности тахогенераторов от величины диаметра корпуса:
/ — асинхронные; 2 — постоянного тока с полым якорем, 3 — постоянного тока с зубцовым якорем
удельный синхронизирующий момент уменьшается, весьма важно выбрать такой СД, который обеспечил бы работу необходимого числа СП с сохранением удельного синхронизирующего момента. Зависимости удельного синхронизирующего момента контактных и бесконтактных СП от удельной мощности датчика при различном числе подключаемых приемников приведены на рис. 11.27.
При применении ВТ и сельсинов в рассредоточенных схемах счетно-решающих систем и систем дистанционных передач необходимо учитывать влияние на их работу линии связи. Активное сопротивление линии связи и его изменение от температуры, а также наличие паразитных емкостей и ин-
дуктивностей между жилами кабеля вносят дополнительные амплитудные и фазовые погрешности схем на ВТ. Увеличение активного и индуктивного сопротивлений линии связи в индикаторных дистанционных передачах приводит к уменьшению удельного синхронизирующего момента, а в трансформаторных дистанционных передачах — к уменьшению выходного напряжения СП.
Уменьшение этих влияний, наряду с ограничением длины линии связи, достигается применением экранированных проводов и кабелей, шунтирующих, фазирующих, компенсационных и усилительных устройств и элементов.
Функциональные свойства ТГ постоянного и переменного тока также определенным образом зависят от их массы и габаритных размеров. На рис. 11.28 и 11.29 представлены кривые зависимостей крутизны характеристик и классов точности от диаметра корпуса асинхронных ТП и ТГ постоянного тока с возбуждением от постоянных магнитов.
11.3.5. Особенности эксплуатации электрических машин малой мощности
Работоспособность ЭМММ существенно зависит от условий и режимов их работы в аппаратуре. Одним из основных факторов, влияющих на работоспособность ЭМММ, является повышенная температура, воздействие которой определяет интенсивность изнашивания и старения узлов и деталей ЭМММ в процессе эксплуатации.
Наибольшее влияние повышенная температура оказывает на работоспособность подшипникового узла, являющегося одним из слабых узлов ЭМММ, особенно электродвигателей. Отказы подшипников чаще всего происходят из-за поломки сепаратора или перекоса внешнего кольца относительно внутреннего.
Характер зависимости средней наработки до отказа ЭМММ от температуры окружающей среды показан на рис. 11.30.
При воздействии повышенной температуры происходит также ухудшение электрических и механических свойств изоляции, вызванное процессами теплового старения, которое приводит к потере эластичности изоляции и снижению ее электрической и механической прочности.
Заметное влияние на долговечность ЭМММ, и в первую очередь коллекторных, оказывает пониженное атмосферное давление. При уменьшении атмосферного
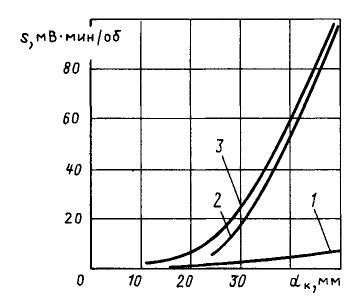
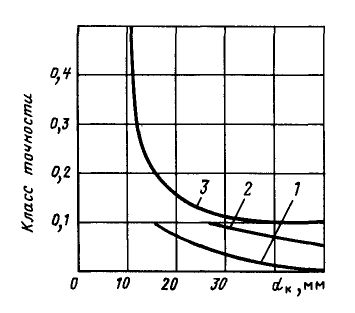
Рис. П.30. Типичные зависимости среднего времени безотказной работы от температуры окружающей среды для двигателей постоянного тока (1), асинхронных (2) и бесконтактных сельсинов (3):
lt —время гарантийной наработки но ТУ; /ср — среднее время наработки до отказа
Рис. 11.32. Износ щеток различных марок в условиях пониженного давления окружающего воздуха за 10 ч работы при плотности тока(50 -=- 80)10~" А/мм2 и скорости скольжения щетки 2,5 — 3 м/с: / - МГС-7И; 2- ВТ-1; 5- ВТ-3; 4- МГМ-1
Рис. 11.31. Область значений дополнительного нагрева корпуса двигателя при понижении давления окружающего воздуха: /-^2ном = 8 Вт; 2-Р2ном = \50 Вт
давления ухудшаются условия теплоотдачи с поверхности ЭМММ, так как уменьшается интенсивность конвекционного теплоотвода, а теплоотвод посредством излучения у ЭМММ составляет лишь 10—15% общей теплоотдачи. Нагрев ЭМММ при воздействии пониженного давления зависит от ее конструкции, мощности и коэффициента использования. На рис. 11.31 показана зависимость дополнительного нагрева коллекторных двигателей постоянного тока от пониженного давления при различной температуре окружающей среды. Для других видов ЭМММ характер зависимости сохраняется. Увеличение температуры ЭМММ, как было показано выше, приводит к снижению ее долговечности.
При работе коллекторных ЭМММ в условиях пониженного атмосферного давления, особенно в условиях глубокого вакуума,
кроме нагрева, происходит ускоренный износ щеток, обусловленный тем, что при понижении атмосферного давления значительно уменьшается содержание влаги и кислорода в воздухе, нарушается процесс образования политуры (прослойки из окиси меди и графита) на поверхности коллекторных пластин, что приводит к увеличению коэффициента трения щеток о коллектор и быстрому их износу. На рис. 11.32 приведены графики, характеризующие износ щеток различных марок в зависимости от атмосферного давления.
Механические нагрузки оказывают наибольшее влияние на коллекторные двигатели и контактные ИЭМ. При воздействии механических нагрузок меняется переходное сопротивление между щеткой и коллектором. Воздействие вибрационных нагрузок на частотах, равных (или кратных) собственной резонансной частоте щегочно-коллекторного узла, может привести к весьма значительным изменениям переходного сопротивления. У коллекторных двигателей это существенно ухудшает коммутацию и приводит к ускоренному износу щеток и коллектора, а также к повышению уровня радиопомех, а при ускорениях, достигающих определенных значений на этих частотах, может иметь место полный разрыв контакта.
Механические нагрузки могут привести к короткому замыканию витков или обрыву провода обмоток, особенно если перед этим изоляция претерпела старение в результате других видов воздействий.
Механические нагрузки вызывают также обратимые изменения ряда параметров ЭМММ (частоты вращения и потребляемого
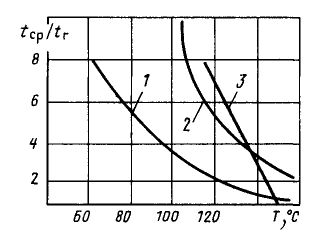
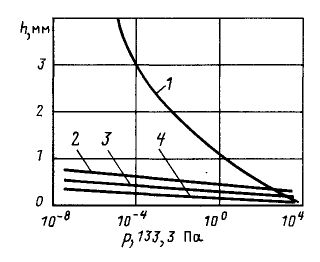
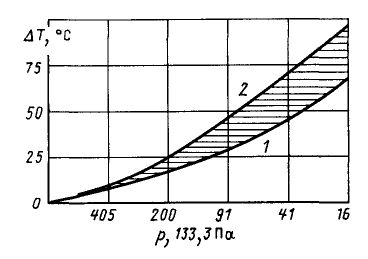
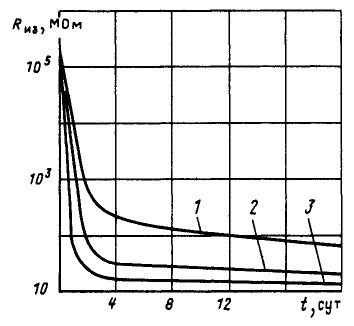
Рис. 11.33. Зависимости сопротивления изоляции ВТ различных типов от времени выдержки при воздействии повышенной влажности : / — контактные ВТ; 2, 3 — бесконтактные
тока двигателей, выходного напряжения ВТ, остаточный' ЭДС ТГ и др.) и могут быть причиной ухода параметров за допустимые нормы.
При воздействии на ЭМММ повышенной влажности окружающего воздуха происходит снижение сопротивления изоляции (рис. 11.33), уменьшается ее электрическая прочность. Влага проникает в имеющиеся в изоляции микротрещины и способствует их развитию (в совокупности с действием других факторов).
Применение ЭМММ в системах автоматики атомных реакторов силовых и энергетических установок обусловливает необходимость их работы при длительном воздействии ионизирующих излучений (потока нейтронов и гамма-излучения). При этом происходят ионизация изоляции, структурные изменения изоляционных, смазочных, магнитных, конструкционных материалов, радиационный нагрев.
В зависимости от мощности дозы излучения сопротивление изоляции может снижаться на 2 — 3 порядка и более. Снижается электрическая и особенно механическая прочность изоляции; после прекращения облучения электроизоляционные свойства частично восстанавливаются, снижение механической прочности необратимо.
Наименее устойчива к воздействию излучений фторопластовая изоляция, более стойкими являются полиимидная и кремний-органическая изоляция и пластмассы с минеральными наполнителями. При воздействии
вибрации на облученную изоляцию она растрескивается и осыпается.
Воздействие радиации приводит к ухудшению работы подшипниковых узлов. В результате радиолиза смазки (окисление, разрушение структуры загустителя, испарение летучих фракций) происходит увеличение вязкости вплоть до затвердевания. При этом увеличивается момент трения в подшипниках, растет потребляемый ток и напряжение трогания. Существенно снижаются ресурсные возможности подшипниковых узлов.
В ионизированной среде ухудшается работа щеточно-коллекторных узлов и центро-бежно-вибрационных регуляторов частоты вращения, что снижает работоспособность коллекторных машин. Точностные параметры ИЭМ могут выходить за пределы допустимых норм вследствие изменения магнитной проницаемости некоторых марок пермаллоя, применяемых для магнитопроводов. После облучения нейтронами металлы конструкции машин приобретают наведенную радиоактивность. Для создания машин с повышенной радиационной стойкостью применяются специальные материалы и комплектующие изделия.
11.3.6. Контроль качества перед установкой в аппаратуру, профилактика и хранение электрических машин малой мощности
Из-за возможных ошибок контролеров, а также нарушений правил транспортирования и хранения среди ЭМММ, поступающих на заводы-изготовители аппаратуры, могут оказаться неработоспособные изделия. Учитывая, что контроль параметров в составе аппаратуры, практически невозможен, для дополнительной проверки ЭМММ по параметрам, определяющим их работоспособность в аппаратуре, необходимо проводить входной контроль.
При проведении входного контроля ЭМММ должны подвергаться, как правило, 100%-ной проверке. В исключительных случаях, когда сплошной контроль невозможен, допускается применение выборочного контроля.
Для установления работоспособности и степени пригодности выполнения изделием своих функций на входном контроле должны подвергаться проверке параметры и характеристики, проверяемые на приемо-сда-точных испытаниях.
Для выявления и устранения скрытых дефектов ЭМММ могут подвергаться тренировкам (прогонам) непосредственно в аппаратуре или на стендах, имитирующих
реальные режимы эксплуатации. При этом режимы тренировок должны соответствовать режимам, указанным в ТУ на машины. Длительность тренировок не должна превышать 100 ч, а время тренировок считается частью времени гарантийной наработки.
На входном контроле не рекомендуется проводить специальный отбор изделий по более жестким нормам, чем это предусмотрено ТУ на них.
Для обеспечения необходимого уровня надежности для некоторых видов ЭМММ предусматривается проведение профилактических (регламентных) работ, на этапах эксплуатации и хранения машин. Периодичность и содержание регламентных работ указывается в инструкциях по эксплуатации.
Наибольшую потребность в профилактическом обслуживании имеют машины со скользящими контактами (коллекторные электродвигатели и ТГ, контактные сельсины, ВТ, фазовращатели, ДУ угла). Разборка и ремонт ИЭМ не допускаются.
При хранении коллекторных двигателей в аппаратуре необходимо производить регулярные запуски их при номинальном напряжении питания и длительности работы 1 — 3 мин. Периодичность таких запусков указывается в инструкции по эксплуатации. Испытание потребителем электрической прочности изоляции токоведущих частей машин допускается не более 3 раз испытательным напряжением, пониженным на 20% относительно полного значения.
Для обеспечения безотказной работы ЭМММ необходимо строго соблюдать правила их хранения, указанные в инструкции по хранению, так как воздействие совокупности факторов окружающей среды вызывает старение изоляционных и смазочных материалов, коррозию металлических поверхностей.
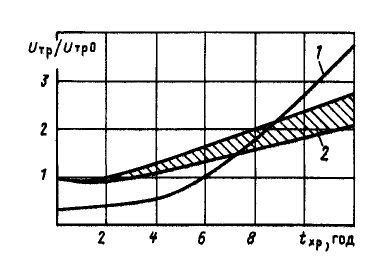
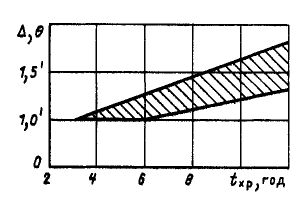
Процесс старения смазки (испарение, химическое разложение, окисление и т. д.) связан с увеличением вязкости и образованием осадка, который, откладываясь на вращающихся частях подшипника,, нарушает балансировку, увеличивает трение и ухудшает теплоотвод. Следствием старения смазки является увеличение статического момента трения, что приводит к увеличению напряжения трогания у двигателей (рис. 11.34) и ухудшению точности индикаторных ИЭМ (рис. 11.35).
Длительное хранение оказывает неблагоприятное воздействие на работоспособность щеточно-коллекторного узла. Вследствие роста окисной пленки на коллекторных пластинах (кольцах) увеличивается переходное сопротивление между щеткой и коллектором, что приводит к нестабильности контакта или полной его потере. В этом случае двигатели могут иметь высокое напряжение трогания или не будут запускаться; существенно ухудшается точность следящих и решающих систем, построенных на ИЭМ.
Перед установкой в аппаратуру двигатели, прошедшие длительное хранение, необходимо включать под номинальное напряжение питания на 10—15 мин работы на холостом ходу. Двигатели постоянного тока последовательного возбуждения следует включать на пониженное напряжение, при котором частота вращения на холостом ходу должна быть в пределах номинальной. После подключения напряжения питания окисная пленка, как правило, пробивается и по мере вращения якоря снимается с поверхности коллектора. Работоспособность двигателей восстанавливается, а напряжение трогания снижается до нормального уровня. Включение двигателя под напряжение и кратковременная работа до установки в аппаратуру способствуют уменьшению напряжения трогания за счет снижения вязкости смазки, которая после длительного хранения находится, как правило, в загустевшем состоянии.
Рис. 11.34. Характер изменения напряжения
трогания коллекторных (1) и асинхронных
(2) двигателей в процессе хранения
Рис. 11.35. Характер изменения погрешности следования сельсинов в процессе хранения
txP,rofi,
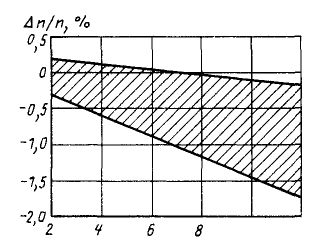
Рис. 11.36. Область относительного изменения частоты вращения двигателей постоянного тока с центробежно-вибрационным регулятором в процессе хранения
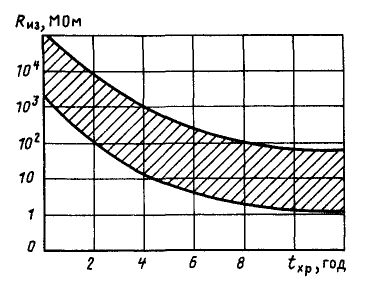
Рис. 11.37. Характер изменения сопротивления изоляции электрических машин в процессе хранения
Значительно труднее происходит восстановление нормальной работы контактного узла ИЭМ, так как контактные ИЭМ работают на низких частотах вращения, поэтому восстановление нормальной работы контакта происходит медленнее по сравнению с двигателями.
При длительном хранении, особенно при воздействии повышенной температуры и ее циклических изменениях, вследствие усталостных явлений в металлах ухудшаются упругие свойства контактных пружин у двигателей с центробежным регулятором частоты вращения, что приводит к уходу частоты вращения двигателей за пределы, установленные в ТУ (рис. 11.36).
Длительное хранение ухудшает также электрические и механические свойства изоляции ЭМММ. В результате старения изоляция становится хрупкой, в ней появляются трещины и расслоения. Проникновение влаги в изоляционные материалы также сопровождается ухудшением их диэлектрических
свойств. Это приводит к снижению сопротивления изоляции (рис. 11.37) и ее электрической прочности. Однако после просушки машин в нормальных условиях окружающей среды или при повышенной температуре сопротивление изоляции восстанавливается практически до первоначальных значений.
Воздействие окружающей среды, особенно при наличии агрессивных примесей, вызывает коррозию незащищенных металлических деталей. При длительном хранении такие детали следует защищать смазками ЦИАТИМ-221 или САМ-3, обладающими высокими антикоррозийными свойствами.
Существенное влияние длительное хранение оказывает на безотказность и наработку ЭМММ.
Оптимальными условиями хранения ЭМММ следует считать: температуру 5 — 15 °С с перепадом за сутки не более 5 °С, относительную влажность воздуха в пределах 40—55%, отсутствие осадков, пыли, активных веществ и биологических влияний.