

Содержание
Предыдущий § Следующий
7.4 Регулировочные свойства двнгателей
Двигатели, предназначенные для работы со скоростями, изменяемыми в широких пределах, имеют габариты, массу и стоимость значительно более высокие, чем электрические машины, работающие при постоянной частоте вращения.
С другой стороны, если диапазон регулирования скорости превышает допустимые пределы, заложенные в двигатель при проектировании, то его эксплуатация затруднена: быстро изнашиваются щетки и коллектор, возможно появление кругового огня и т. п. Возможен даже выход из строя двигателя из-за разрушения подшипников, бандажей, крепящих лобовые части обмоток, и т. д.
Поэтому экономически нецелесообразно ни применение двигателей с улучшенными регулировочными свойствами при постоянной или мало изменяющейся частоте вращения, ни регулирование скорости в широких пределах у двигателя, не предназначенного для этого: в первом случае растут капитальные затраты (на приобретение двигателя), а во втором — эксплуатационные затраты.
Наиболее важным показателем регулировочных свойств двигателя является коэффициент изменения скорости
где сотах и со„ом — соответственно максимальная и номинальная угловые скорости; fomax и va ном — линейные скорости на поверхности якоря; «max и лНОм — соответствующие частоты вращения.
Мощность электрической машины выражается формулой (см. гл. 10)
Подставив в (7.43) максимально допустимые значения линейной нагрузки А, индукции в воздушном зазоре В6 и скорости на поверхности якоря va, получим максимальную расчетную (конструк-
ционную) мощность Ркон, которую можно вписать в данные габариты якоря (при заданном диаметре Da и длине железа якоря 1а) при равенстве максимальной и номинальной скоростей:
При заданных материалах (сталь, медь, изоляция и т. д.) и технологии производства величины Лтах, бетах и иОтах являются вполне определенными. Поэтому расчетная мощность машины при заданной массе определяет качество машины, которое обычно характеризуется приведенной массой машины
Скорость двигателя в номинальном режиме меньше максимальной в kv раз, где kv — соотношение скоростей,
Отсюда ясно, что чем больше kv, тем тяжелее получается машина или, при заданных габаритах, тем меньше мощность двигателя.
У двигателей постоянного тока общего назначения обычно kv я? « 1,5... 2,0, т. е. можно увеличивать частоту вращения в 1,5... 2 раза выше номинальной. Некоторые специальные машины (например, балансирные) имеют kv=3...4, поэтому они значительно тяжелее и дороже, чем двигатели общего назначения.
Для двигателя с широким диапазоном регулирования скорости проблемой может явиться необходимость обеспечения безыскровой коммутации и предотвращения возникновения кругового огня. Оценка качества коммутации (в процентах) при повышенной частоте вращения проводится путем вычисления допустимого длительного коммутационного нарушения по формуле (4.120):

Amax для надежной работы машины не должна быть менее 10% (см. гл. 4).
Реактивная ЭДС ер.ср растет прямо пропорционально частоте вращения, поэтому с увеличением скорости уменьшается выражение в скобках, которое в пределе равно 2, а также растет Кщ. Все это приводит к уменьшению допустимого значения Атах и из-за неизбежных коммутационных нарушений (вибрации щеток, технологи-
Взяв отношение допустимых коммутационных нарушений в номинальном режиме Атахном% и в режиме максимальной скорости
при ТОМ Же ТОКе ЯКОрЯ Дтахи%,
получим
Формула (7.50) показывает, во сколько раз меньше допустимое коммутационное нарушение при максимальной частоте вращения, чем при номинальном режиме. Ширина безыскровой зоны (в опыте подпитки) в номинальном режиме, при повышенной частоте вращения уменьшается прямо пропорционально уменьшению
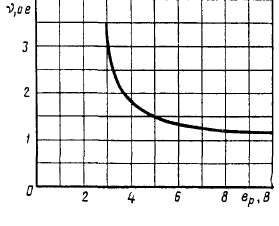
Рис. 7.16. Зависимость х = ц>(ер)
max
Задаваясь в режиме максимальной скорости Дтах=Ю%, из (7.49) можно определить максимальное значение коэффициента йщ:
Зависимость v=f (ep) построена на рис. 7.16; из нее следует, что при больших значениях реактивной ЭДС 5... 8 В, которых можно ожидать в режиме максимальной скорости, v=l,5... 1,25. Следовательно, ориентировочное значение
В номинальном режиме, который обычно принимается за расчетный, значение /Сщ должно быть соответственно снижено:
Практически это сводится к уменьшению полного тока паза и среднего значения реактивной ЭДС. В общем случае трудно оценить зависимость массы машины от реактивной ЭДС. Подробные расчеты вариантов двигателя мощностью около 1000 кВт при массе около 4500 кг показали, что снижение реактивной ЭДС в номиналь-
ном режиме с ер.ср=4,0 В до ер.ср=3,0 В приведет к увеличению массы двигателя на 1000 кг. Это объясняется тем, что для снижения реактивной ЭДС нужно уменьшить линейную нагрузку и сделать более широкие и мелкие пазы, т. е. увеличить диаметр якоря.
Пренебрежение условиями (7.52) и (7.53) ведет к тому, что в эксплуатации наблюдается интенсивное искрение щеток, повышенный износ щеток и коллектора, а это резко увеличивает эксплуатационные расходы.
Потенциальные условия на коллекторе (см. гл. 3) определяются средним значением напряжения между коллекторными пластинами и коэффициентом искажения поля. Максимальное напряжение между смежными коллекторными пластинами, которое в основном определяет склонность машины к возникновению кругового огня на коллекторе, согласно (3.23), eCmax = &fec ср/а, где ессР = 2р £///( — среднее напряжение между смежными коллекторными пластинами; а «0,67 — коэффициент полюсного перекрытия; fey— коэффициент искажения поля реакцией якоря.
Например, для машины с равномерным воздушным зазором без компенсационной обмотки, согласно (3.26),
где k=Fr.n/FPa — коэффициент устойчивости магнитного поля.
Так как МДС главного полюса FT.n пропорциональна току возбуждения, а МДС реакции якоря Fpa — току якоря, то можно записать
Поэтому при переходе от номинального режима к режиму максимальной скорости максимальное напряжение между смежными коллекторными пластинами возрастает, возрастает и вероятность возникновения кругового огня.
Для машины с равномерным воздушным зазором, при отсутствии компенсационной обмотки, из (3.26) и (7.60)
Если принять, как это обычно делается, &mln=l, то требуемый коэффициент устойчивости в номинальном режиме kH0M=knackv и формула (7.60) примет вид
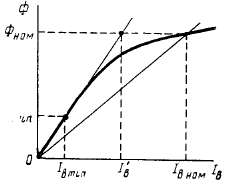
Фп.
Рис. 7.17. Определение тока возбуждения при максимальной частоте вращения
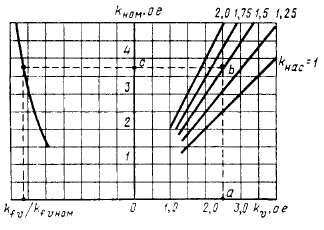
На рис. 7.18 показаны зависимости knoM=f(kv), при различных коэффициентах насыщения, и kfV/kf HOu=f<(k), построенная по формуле (7.61).
Из рис. 7.18 видно, что для предотвращения кругового огня в машине без компенсационной обмотки необходимо, чтобы в номинальном режиме коэффициент устойчивости был большим. Так, например, при диапазоне регулирования &о=2,5 и коэффициенте
насыщения &нас=1,5, *Ном=3,75 (рис. 7.18; точки а, Ь, с), что заставляет делать катушку главного полюса с большой МДС, т. е-увеличивать габариты машины. Поэтому двигатели, предназначенные для работы в широком диапазоне скоростей, выполняются с небольшим коэффициентом насыщения. Кроме того, нужно уменьшить среднее напряжение между смежными коллекторными пластинами. В рассмотренном случае в режиме максимального ослабления поля kf= 1 + 1/^=2. Поэтому среднее напряжение между смежными пластинами
При естах=30...35 В получим ес.Ср=10... 12 В, т. е. очень низкое значение, что также отражается на размерах машины. Несколько лучшие результаты получаются при клиновидном зазоре. При тех же условиях &/=1,43 (см. рис. 3.23) среднее напряжение между смежными коллекторными пластинами еССр«13,5... 15,2 В. Резкое улучшение потенциальных условий происходит при применении компенсационной обмотки, когда &/»l,l... 1,2 и среднее напряжение между пластинами можно поднять до 1,8 ...22 В, т. е. почти на 40%. Поэтому, а также из-за уменьшения МДС главных и дополнительных полюсов габариты двигателей и их масса при применении компенсационной обмотки снижаются. Это снижение тем существеннее, чем больше мощность двигателя и шире диапазон регулирования.

Иногда габаритные ограничения или ограничения массы двигателя настолько жестки, что не удается спроектировать машину, которая позволяла бы реализовать все режимы, допустимые по нагреванию и механической прочности якоря. В этом случае приходится вводить ограничения по коммутации и по потенциальным условиям. Ограничение характеристик по потенциальным условиям производится исходя из максимально допустимого напряжения между
смежными коллекторными пластинами. Его выбирают из рис. 3.20, в зависимости от толщины изоляции между пластинами и их ширины. Впоследствии допустимое напряжение уточняется по результатам эксплуатации.
Зная параметры машины И бетах, МОЖНО ОП-
ределить максимальный коэффициент искажения поля
а затем и минимальный коэффициент устойчивости: при равномерном за-
Рис. 7.18. Определение коэффициента устойчивости в номинальном режиме в зависимости от коэффициента kv
зоре из формулы (3.26) следует
при клиновидном зазоре по приближенной формуле, которая достаточно точна при изменении k в пределах от 0,5 до 2,5:
Аналогично находится йтщ и при наличии компенсационной об-мотки, хотя обычно этого делать и не требуется: компенсационная обмотка, как правило, снимает ограничения по потенциальным условиям.
Таким образом, ограничение по потенциальным условиям или максимальному напряжению между смежными пластинами сводится к тому, чтобы сохранять минимально допустимый коэффициент устойчивости


В двигателе с последовательным возбуждением такое ограничение получается само собой, если зафиксировать максимально допустимую степень ослабления тока возбуждения (характеристика при (3 = 0,4 на рис. 7.19), т. е. минимальное сопротивление /?рсгв, шунтирующее обмотку возбуждения, при котором
Для двигателя с параллельным возбуждением выполнение условия /B//a==const при отсутствии насыщения магнитной системы сводится к выполнению условия nla — const, так как
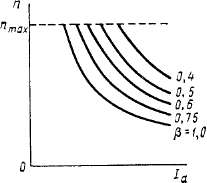
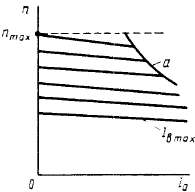
Рис. 7.19. Ограничения по потенциальным условиям двигателя с последовательным возбуждением
Рис. 7.20. Ограничения по потенциальным условиям двигателя с параллельным возбуждением
Следовательно, ограничительная линия (кривая а на рис. 7.20) имеет вид скоростной характеристики двигателя последовательного возбуждения.
Ограничение по коммутации установить значительно труднее. Ранее было ориентировочно получено предельное значение /Сщ= = 600...900. Поскольку коэффициент Кщ пропорционален скорости и квадрату тока якоря
Km=cl/lva=c2lln, (7.71)
можно получить предельное значение тока якоря в зависимости от скорости вращения
Выражение (7.72) —первое приближение, так как не учитывается, что с увеличением скорости коммутационные нарушения возрастают. Кроме того, в эксплуатации предельные режимы по току и скорости сравнительно редки, поэтому в этих режимах можно допустить большую степень искрения: из-за малой длительности это не окажет существенного влияния на износ щеток и коллектора.
Поэтому ограничения по коммутации не такие жесткие, как по потенциальным условиям, и должны корректироваться в соответствии с опытом эксплуатации.
Ограничения по коммутации и потенциальным условиям, особенно неприятные при эксплуатации крупных электродвигателей, заставляют оговаривать в технических условиях не только диапазон регулирования скорости, характеризуемый коэффициентом kv, но и мощность Р„, которую можно реализовать при максимальной частоте вращения. Например, немецкие тяговые двигатели должны удовлетворять условию Pv^l,\PH0M.
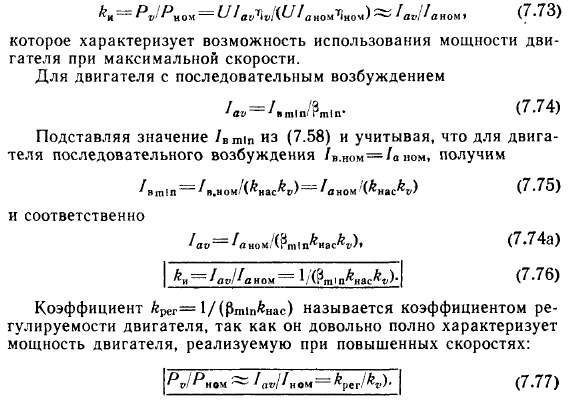
Без большой погрешности соотношение мощностей можно заменить отношением токов якоря:
Чем больше kv, тем больше желательный коэффициент регулируемости, а это ставит перед проектировщиками машины дополнительные требования в обеспечении коммутации и потенциальных условий на коллекторе, что сказывается на размерах и массе машины.
В последние годы все большее число двигателей постоянного тока изготавливается для специализированных электроприводов, работающих под контролем систем автоматического регулирования в очень широком диапазоне скоростей. При этом электропривод должен иметь механическую характеристику, наиболее подходящую для выполнения заданного технологического процесса. Широко распространен тип механической характеристики, показанный на рис. 7.21. При малых скоростях до номинальной скорости действует
максимальный момент Afmax. При этом мощность двигателя постепенно возрастает до значения
где шном — номинальная угловая скорость.
При скоростях, больших (Оном, поддерживается режим постоянной МОЩНОСТИ Afu) = PHOM = COnst, ИЛИ
т. е. момент уменьшается с ростом скорости по гиперболическому закону.
Рассмотренная механическая характеристика типична для тяговых двигателей (электрические трансмиссии тепловозов, большегрузных автомобилей, электромобилей и т. д.) и других устройств, где двигатель получает питание от источника ограниченной мощности.
Такая характеристика реализуется обычно при двухзонном регулировании: в области малых скоростей изменяется напряжение на якоре при неизменном — максимальном — токе возбуждения; в области высоких скоростей напряжение на якоре сохраняется неизменным, а регулируется ток возбуждения. На рис. 7.22, а показано штриховыми линиями семейство скоростных характеристик двигателя с последовательным возбуждением и сплошной линией — закон регулирования тока якоря для реализации тяговой характеристики, изображенной на рис. 7.21.
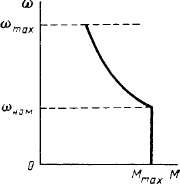
Рис. 7.21. Механическая характеристика тягового электропривода
Рис. 7.22. Реализация тяговой механической характеристики при неизменном (а) и уменьшенном на большей скорости токе якоря (б)
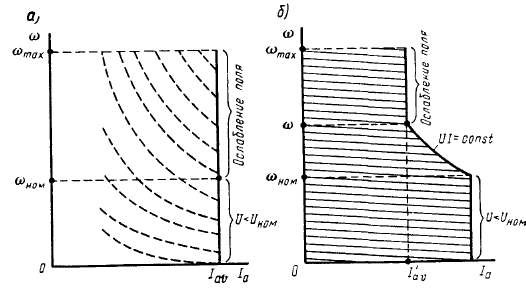
В простейшем случае (рис. 7.22, а) ток якоря поддерживается постоянным во всем диапазоне скоростей. До пусковой скорости о)Ном напряжение на якоре постепенно возрастает, а затем остается неизменным Дальнейшее повышение со достигается постепенным уменьшением тока возбуждения.
Наиболее тяжелый в коммутационном отношении режим максимальной скорости, где реактивная ЭДС имеет наибольшее значение. Это касается и потенциальных условий на коллекторе: в режиме максимальной скорости ток возбуждения минимален, а следовательно, минимален и коэффициент устойчивости, а искажение поля максимально.
Для улучшения потенциальных условий на коллекторе можно применить компенсационную обмотку, отчего резко снижается значение максимального напряжения между коллекторными пластинами. В результате машина может получиться неравнопрочной — коммутация напряженная, в то время как по потенциальным условиям имеется запас. В этом случае целесообразно бывает облегчить условия коммутации за счет некоторого ухудшения потенциальных условий. Для этого (рис. 7.22, б) повышение угловой скорости от соНом до некоторого значения со' производится за счет повышения напряжения сверх номинального до с7тах при одновременном снижении тока так, чтобы мощность двигателя оставалась неизменной:
При повышении напряжения сверх номинального двигатель, как правило, получается легче, чем при отсутствии регулирования напряжения. Однако источник питания или регулятор напряжения получается более сложным и дорогим. Поэтому оптимальный способ получения требуемой механической характеристики должен определяться из комплексного рассмотрения всего оборудования.
Механическая характеристика в системе автоматизированного электропривода может быть сформирована из характеристик двигателя с последовательным возбуждением (рис. 7.22, а) или характеристик двигателя с параллельным возбуждением (рис. 7.22, б).
В большинстве случаев предпочтительнее использовать двигатель с параллельным возбуждением, у которого меньше ток возбуж-
дения и, следовательно, легче и дешевле регулятор возбуждения. Часто бывает выгодно сделать напряжение возбуждения ниже, чем напряжение на якоре. Это позволяет в то же время получить технологичную катушку обмотки возбуждения с достаточно большим коэффициентом заполнения при приемлемых размерах регулятора возбуждения. Такой двигатель называется двигателем с независимым возбуждением.