

Содержание
Предыдущий § Следующий
7.5. Работа электродвигателей в тормозных режимах
Электрические двигатели используются не только для приведения во вращение механизмов, но и для их торможения. Торможение необходимо, если нужно быстро остановить механизм или уменьшить его частоту вращения. Применение механических тормозов для этого затруднительно из-за нестабильности их характеристик, малого быстродействия и трудностей автоматизации.
Различаются три вида тормозных режимов двигателей постоянного тока:
1) генераторное торможение с отдачей электрической энергии в сеть (рекуперативное торможение);
2) генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря (реостатное, или динамическое, торможение);
3) электромагнитное торможение (торможение противовключе-нием).
Во всех трех режимах электромагнитный момент М воздействует на якорь в направлении, противоположном п, т. е. является тормозным. Рассмотрим более подробно эти режимы.
Рекуперативное торможение. Двигатель с параллельным возбуждением переходит в режим рекуперативного торможения, если его частота вращения превышает по=и/(сеф). Тогда ЭДС машины становится больше напряжения сети и ток меняет направление:
(7.84)
т. е. двигатель переходит в генераторный режим, создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть использована.
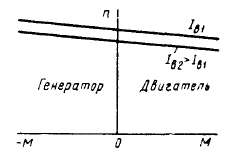
Переход машины с параллельным возбуждением из двигательного режима в генераторный может происходить автоматически, если под действием внешнего момента якорь вращается с частотой, большей частоты вращения холостого хода: п~>п0. Можно перевести машину в генераторный режим и принудительно, уменьшив частоту вращения п0 за счет увеличения магнитного потока (тока возбуждения) или снижения напряжения, подводимого к двигателю. Механические характеристики в генераторном режиме являются продолжением механических характеристик двигательного режима в область отрицательных моментов (рис. 7.23).
Двигатели с последовательным возбуждением не могут автоматически переходить в режим рекуперативного торможения. Если необходимо иметь рекуперативное торможение, схему двигателей в тормозном режиме изменяют, превращая двигатели в генераторы с независимым возбуждением. Двигатели со смешанным возбуждением могут автоматически переходить в генераторный режим, что обусловило их применение в троллейбусах и трамваях, где часты остановки, а двигатель должен обладать мягкой механической характеристикой.
Рис. 7.23. Механические характеристики двигателя с параллельным возбуждением в двигательном и генераторном режимах
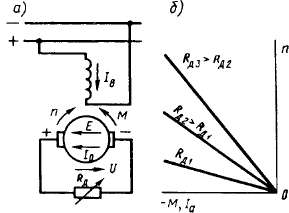
Рис. 7.24. Схема включения двигателя с параллельным возбуждением в режиме динамического торможения (а), скоростные и механические характеристики при торможении (б)
Динамическое торможение. При динамическом (реостатном) торможении двигателя с параллельным возбуждением обмотка якоря отключается от сети и к ней присоединяется реостат /?д (рис. 7.24, о). При этом машина работает в генераторном режиме и создает тормозной момент. Однако выработанная электрическая энергия гасится в реостате. Ток якоря при торможении
прямо пропорционален частоте вращения п, вследствие чего скоростные характеристики I=f(n)—прямые, проходящие через начало координат (рис. 7.24, б).
Тангенс угла наклона характеристик у в масштабе равен сопротивлению в цепи якоря:
В процессе торможения по мере уменьшения скорости постепенно уменьшают Ял, плавно или ступенями, чтобы поддержать средний ток якоря, а следовательно, и тормозной момент на заданном уровне. При очень больших частотах вращения в режиме торможе-
нчя приходится уменьшать ток возбуждения, чтобы ЭДС машины Е не превзошла допустимого значения
Механические характеристики в тормозном режиме при постоянном магнитном потоке имеют тот же вид, что и скоростные характеристики, только масштаб по оси абсцисс меняется в соответствии с формулой М — счФ1а (рис 7 24, б)
При ослабленном поле (при уменьшенном токе возбуждения) характеристики остаются линейными, но увеличивается угол их наклона При л «О тормозной
момент равен нулю Следовательно, для того чтобы якорь был заторможен в неподвижном состоянии, реостатное торможение должно быть дополнено другим, например механическим
Двигатель с последовательным возбуждением может работать в режиме динамического торможения, но при переводе его в этот режим нужно переключить провода, подводящие ток к обмотке возбуждения (рис 7 25) Это необходимо для того, чтобы при изменении направления тока в якоре при переходе из двигательного режима в генераторный направление тока в обмотке возбуждения оставалось неизменным (от б к а, рис 7 25) и создаваемая этой обмоткой МДС Fв совпадала по направлению с МДС FOCT от остаточного магнетизма В противном случае генераторы с самовозбуждением размагничиваются
Построение тормозных характеристик поясняется рис 7 26, а. Если в цепь машины включено добавочное сопротивление /?д, то установившийся режим работы соответствует точке пересечения
Рис 7 25 Изменение схемы при переводе двигателя последовательного возбуждения (а) в режим динамического торможения (б)
Рис 7 26 Характеристики n=f(la) при реостатном торможении двигателя последовательного возбуждения и их построение
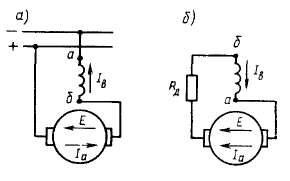
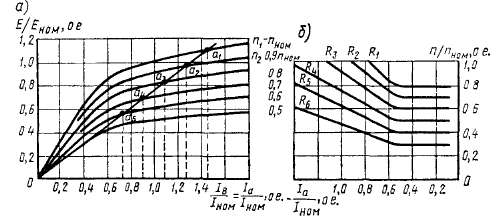
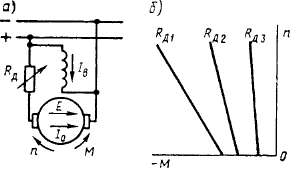
Рис. 7.27. Схема включения двигателя с параллельным возбуждением в режиме электромагнитного торможения и его механические характеристики
вольт-амперной характеристики сопротивления (2# + /?д) с характеристикой E—f(IB), которая близка к характеристике холостого хода. При Пх это точка аь при п2 — точка а2 и т. д. При некоторой критической скорости, когда вольт-амперная характеристика сопротивления совпадает с начальным прямолинейным участком характеристики E=f(la), машина размагничивается и ток становится близким к нулю. По координатам точек а\, а2 и т. д. можно построить зависимость n—f(Ia); эти скоростные характеристики являются нелинейными (рис. 7.26, б).
Механические характеристики строятся на основании скоростных характеристик и моментной — М= =/(/о), они также нелинейны.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление вращения, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении
направления вращения двигателя, путем переключения проводов, подводящих ток к обмотке якоря (рис. 7.27, а) или к обмотке возбуждения. Чтобы ограничить ток в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление /?д. Регулирование тока Ia=(U+E)/(I,R+RA), т. е. тормозного момента М, осуществляют изменением Ra (рис. 7.27, б) или ЭДС (тока возбуждения /„).
С энергетической точки зрения рассматриваемый способ торможения невыгоден, так как машина потребляет как механическую, так и электрическую энергию, которые гасятся в обмотке якоря и включенном в ее цепь реостате. Но при этом способе можно получать большие тормозные моменты при низких частотах вращения и даже при п = 0, поскольку в этом случае ток Ia= U/ (2/? + /?д).