

Содержание
Предыдущий § Следующий
РАЗДЕЛ 23
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА ДЛЯ ШИРОКОРЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ, ПРОМЫШЛЕННЫХ РОБОТОВ И СЛЕДЯЩИХ СИСТЕМ
23.1. Двигатели постоянного тока для промышленных роботов и гибких производственных систем
23.1.1. Общие технические требования
Двигателями такого класса комплектуются тиристорные и транзисторные электроприводы металлообрабатываемых ст анков, а также приводы «мускулов» современных роботов и манипуляторов, обеспечивающих перемещение инструмента (деталей) по строго определенной траектории в реальном масштабе времени с их позиционированием в любом положении с заданной точностью позиционирования. Такие двигатели широко используются также в машиностроении для точного и динамичного управления различного рода клапанами и вентилями пневматических и гидравлических систем.
В зависимости от способа преобразования напряжения переменного тока электроприводы подач подразделяются на тиристорные с силовым преобразователем, выпол-
ненным на основе управляемых выпрямителей, и на транзисторные (транзисторно-тиристорные) на основе реверсивных преобразователей.
Возбуждение двигателей подач осуществляется от высокоэнергетических постоянных магнитов. Неотъемлемыми элементами конструкции таких двигателей являются встроенный датчик частоты вращения, электромагнитный тормоз, датчик температурной защиты и датчик пути.
Общие технические требования, которым должны удовлетворять современные двигатели электроприводов подач промышленных роботов и гибких производственных систем, регламентируются ГОСТ 26061-85.
Двигатели подач классифицируются по роду тока на двигатели постоянного тока с возбуждением от постоянных магнитов и двигатели переменного тока: синхронные с возбуждением от постоянных магнитов и асинхронные с короткозамкнутым ротором.
По способу выполнения силового преоб-
разователя приводы делятся на тиристор-ные на основе реверсивных управляемых выпрямителей, ведомых сетью, и на транзисторные (транзисторно-тиристорные) на основе реверсивных преобразователей с широтно-импульсным или релейным регулированием с промежуточным звеном постоянного тока.
По виду главной обратной связи различают системы с обратной связью по частоте вращения (регулируемые по скорости электроприводы) и системы с обратной связью по положению (автономный следящий электропривод) с заданием положения кодом или последовательностью импульсов. При этом в случае необходимости реализации обратной связи по положению двигатель должен иметь встроенный или пристроенный датчик угла поворота вала.
В состав электроприводов с обратной связью по частоте вращения должны входить: электродвигатели с набором необходимых для функционирования электропривода датчиков и устройств, встроенных или пристроенных к двигателю; силовые преобразователи или блоки регулирования, управляющие двигателями; блок питания с необходимыми принадлежностями, осуществляющий преобразование переменного напряжения питающей сети в постоянное (для электроприводов с промежуточным звеном постоянного тока), блок питания может быть объединен с блоком регулирования в одно устройство — силовой преобразователь; автоматический выключатель или другое защитное устройство, служащее для отключения электропривода от питающей сети в аварийных режимах.
В состав электропривода с обратной связью по положению (автономного следящего электропривода) должны входить: электропривод с обратной связью по частоте вращения; датчик положения (угла поворота), встроенный или пристроенный к двигателю; блок связи, обеспечивающий преобразование кода задания положения от управляющей вычислительной машины и сигналов от датчика положения в сигнал для управления электроприводом с обратной связью по частоте вращения.
Допускается исполнение автономного следящего электропривода без тахогенерато-ра с выделением информации о частоте вращения датчика обратной связи по положению.
Номинальные вращающие моменты ■Whom в режиме S1 по ГОСТ 183-74 при частоте вращения п = 0 двигателей для промышленных роботов и гибких производ-
ственных систем должны соответствовать ряду 0,035; 0,047; 0,07; 0,1; 0,13; 0,17; 0,23; 0,35; 0,47; 0,7; 1,0; 1,3; 1,7; 2,3; 3,5; 4,7; 7,0; 10; 13; 17; 23; 35; 47 Н-м.
В диапазоне частот вращения от птт до 0,25 птах двигатели подач должны обеспечивать без ограничения времени вращающий момент, равный Мном.
В тиристорных электроприводах (класс 1) двигатели подач при частоте вращения птах должны обеспечивать в режиме S1 момент вращения не менее 0,8А/НОМ; в транзисторных электроприводах (класс 2) двигатели подач должны обеспечивать при частоте вращения 0,6птах длительный момент не менее 0,8А/ном и ПРИ птах ~ не менее 0,5Мнои в течение 1 мин.
В зависимости от назначения двигатели должны допускать максимальные частоты вращения при следующих моментах:
Длительные моменты Максимальная частота вращения Мдо, Н м вращения пмтс, об/мин
класс 1 класс 2
0,035-0,23 .... 4000 6000
0,35-2,3..... 2000 3000
3,5-7,0...... 1500 2500
10-47...... 1000 2000
Согласно ГОСТ 26061-85 для двигателей подач определяются:
диаграммы длительно допустимых моментов в режиме S1 в зависимости от скорости;
диаграммы, содержащие зависимость допустимого времени работы от отношения М/Мтм в режимах S2 по ГОСТ 183-74 при частоте вращения, равной 0,25ишах;
диаграммы зависимости момента от частоты вращения в режиме S3 по ГОСТ 183-74 при ПВ = 25 % и времени рабочего цикла 30 мин в диапазоне частоты вращения до 0,25итах, при ПВ = 40% и времени рабочего цикла 10 мин в диапазоне частот вращения от 0 до 0,25птах;
диаграммы максимальных моментов в переходных режимах в зависимости от частоты вращения в течение не менее 0,2 с.
Степень защиты двигателей со встроенными датчиками с естественной вентиляцией по ГОСТ 14254-80 должна быть IP44. Электродвигатели малой мощности допускается выполнять без выводной коробки. В этом случае степень защиты электродвигателей определяется без учета степени защиты свободных концов соединительных кабелей.
Форма исполнения двигателей — IM3001, IM3011, IM3031 или IM3081 по ГОСТ 2479-79.
Уровень вибрации двигателей должен соответствовать классу вибрации 0,7 или 1,8 по ГОСТ 16921-83. Уровень вибрации оценивается при п = d,5nmax.
Допустимые пределы уровня шума двигателей должны соответствовать классу 1 или 2 по ГОСТ 16372-84: они оцениваются при п = 0,5итдх.
Допуски на концентричность центрирующей заточки, на перпендикулярность опорного фланца по отношению к валу и на биение свободного конца вала должны быть не ниже класса «Повышенная точность» по ГОСТ 8592-79.
23.1.2. Двигатели постоянного тока серии ДП
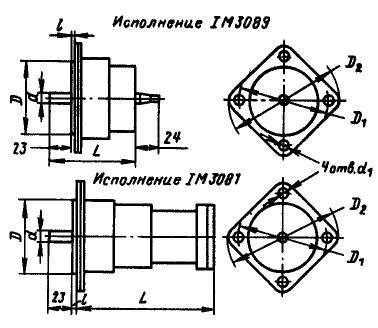
Двигатели серии ДП предназначены для использования в электроприводах манипуляторов промышленных роботов в соответствии с требованиями ГОСТ 16264.0-85 и имеют два исполнения: IM3089 с пристроенным выключателем ПДФ-8 и IM3081 с тахо-генератором постоянного тока.
Технические данные двигателей приведены в табл. 23.1, габаритные и установочно-присоединительные размеры — в табл. 23.2.
Двигатели ДП допускают работу в продолжительном режиме S1 по ГОСТ 183-74 (время непрерывной работы 16 ч с последующим охлаждением до температуры окружающей среды), в кратковременном режиме S2 с длительностью цикла 10 мин, а также в повторно-кратковременном режиме S3 с ПВ = 40 %. При кратковременном и повторно-кратковременном режимах среднеквадратичный ток двигателя не должен превышать номинального значения.
Таблица 23.1. Технические данные двигателей серии ДП
Таблица 23.2. Габаритные и установочно-
присоединительные размеры, мм,
двигателей ДП
Двигатели механически устойчивы к воздействию вибрационных нагрузок в диапазоне частот 1—50 Гц с максимальным ускорением 9,8 м/с2.
23.1.3. Двигатели постоянного тока типа ДР
Двигатели ДР1 и ДР4 с возбуждением от постоянных магнитов, с дисковым якорем и со встроенным тахогенератором предназначены, для следящих электроприводов промышленных роботов и манипуляторов.
Основные технические данные двигателей, соответствующие продолжительному режиму работы S1, приведены в табл. 23.3.
Питание двигателей осуществляется от источников постоянного тока с пульсацией напряжения не более 8%.
|
Тип |
двигателя |
||
|
Поклеят? ггь |
|||
|
ДП70 |
ДП90 |
ДП125 |
|
|
Номинальный момент, Н ■ м |
0,05 |
0,13 |
0,29 |
|
Номинальная мощность, Вт |
16 |
40 |
90 |
|
Номинальное напряжение, В |
48 |
48 |
48 |
|
Номинальная частота вра- |
3000 |
||
|
щения, об/мин |
|||
|
Начальный пусковой мо- |
0,12 |
0,45 |
1,3 |
|
мент, Н ■ м |
|||
|
Потребляемый ток при но- |
1.1 |
2,1 |
3,5 |
|
минальном моменте, А |
|||
|
Масса, кг, при исполнении: |
|||
|
Ш3081 |
1,25 |
1.4 |
2,3 |
|
Ш3089 |
0,85 |
1 |
1,9 |
|
Тип двигателя |
D |
»i |
d |
L |
/ |
||
|
Исполнение IM3089 |
|||||||
|
ДП70 |
70 |
85 |
105 |
5 |
5,8 |
115 |
2,5 |
|
ДП90 |
90 |
100 |
120 |
8 |
7 |
105 |
3 |
|
ДП125 |
130 |
165 |
185 |
9 |
12 |
105 |
3,5 |
|
Исполнение |
М3081 |
||||||
|
ДП70 |
70 |
85 |
105 |
5 |
5,8 |
180 |
2,5 |
|
ДП90 |
90 |
100 |
120 |
8 |
7 |
170 |
3 |
|
ДП125 |
130 |
165 |
185 |
9 |
12 |
170 |
3,5 |
Таблица 23.3. Технические данные двигателей типа ДР
|
Показатель |
ДР1 |
ДР4 |
|
Номинальный вращающий мо- |
3,55 |
13,7 |
|
мент, Н • м |
||
|
Частота вращения, об/мин: |
||
|
номинальная |
3000 |
3000 |
|
максимальная |
4500 |
4000 |
|
Мощность, кВт |
1,12 |
4,3 |
|
Напряжение, В |
100 |
220 |
|
Ток, А |
13 |
21 |
|
Момент инерции, 10~3 кг-м2 |
2,75 |
10,5 |
|
Масса, кг |
16 |
38 |
Допускается работа в повторно-кратковременном режиме с числом включений в час до 900 для двигателя типа ДР1 и до 300 для двигателя типа ДР4, при этом среднеквадратичный ток двигателя не должен превышать его номинального значения.
В переходных режимах работы двигатели ДР допускают момент вращения на его валу до 5МНОМ в течение 20 мс.
Исполнение двигателей по степени защиты - IP44 (по ГОСТ 14254-80), по способу охлаждения - IC0040 (по ГОСТ 20459-75).
Рис. 23.1. Габаритные и установочно-при-
соединительные размеры двигателей типов
ДР1 и ДР4
Исполнение по способу монтажа двигателей ДР1-1М3681, двигателей ДР4-IM3081 по ГОСТ 2479-79.
Группа условий эксплуатации — М8 по ГОСТ 17516-72.
Габаритные, установочные и присоединительные размеры двигателей ДР1 и ДР4 приведены на рис. 23.1.
Двигатели имеют встроенный тахогене-ратор, технические данные которого приведены ниже:
Частота вращения, об/мин:
номинальная....... 1000
максимальная...... 5000
Напряжение, В........ 10
Пульсация напряжения при частоте вращения 3000 об/мин, %, не
более.......... 2
Ток, мА.......... 6
Максимальный ток, мА..... 40
23.1.4. Двигатель постоянного тока типа ПЯ-250Ф
Двигатель типа ПЯ-25ОФ с дисковым якорем предназначен для электроприводов систем автоматического регулирования, следящих систем и лентопротяжных механизмов вычислительных машин.
Технические данные двигателя ПЯ-250Ф
Номинальный вращающий момент,
Н • м...........0,8
Номинальная мощность, Вт ... 250 Номинальное напряжение, В . . . 36 + 4 Номинальная частота вращения,
об/мин..........3000
Номинальный ток якоря, А, не
более.......... 10
Электротехническая постоянная
времени, мс, не более .... 15
КПД, %.......... 70
Кратность пускового момента, не
менее.......... 4
Масса, кг.......... 7
Питание двигателя осуществляется от сети постоянного тока или от источника пульсирующего тока с уровнем пульсаций напряжения не более 5 %. Допускается работа с большими пульсациями напряжения сети при снижении вращающего момента, при этом среднеквадратичный ток двигателя не должен превышать 0,9/ном.
Номинальный режим работы — S1. Допускается работа в режимах S2 — S7, а также
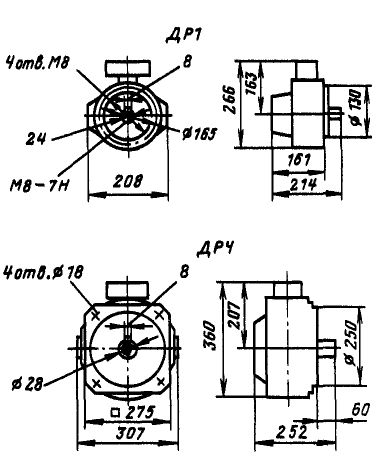
Таблица 23.4. Технические данные двигателей ДПУ
Рис. 23.2. Габаритные и установочно-при-
соединительные размеры двигателей типа
ПЯ-250Ф
в режимах частых пусков и реверсов со среднеквадратичным током не более 0,9/ном.
Регулирование частоты вращения в пределах 4000—20 об/мин осуществляется изменением напряжения якоря. Разность частот вращения при изменении направления вращения на холостом ходу и под номинальной нагрузкой — не более 5 %.
Напряжение трогания — не более 1 В.
Двигатель выдерживает при напряжении не выше номинального двукратную перегрузку по току в течение 1 с и четырехкратную перегрузку — в течение 0,1 с. Двигатель допускает прямой пуск при номинальном напряжении, при этом момент инерции нагрузки, приведенный к валу двигателя, не должен превышать момента инерции якоря.
Исполнение двигателя по степени защиты — IP40; по способу охлаждения — IC041, по способу монтажа — IM9101; выходной конец вала двигателя имеет два исполнения — со шпоночной канавкой и с лыской.
Габаритные, установочные и присоединительные размеры двигателя приведены на рис. 23.2.
23.1.5. Двигатели постоянного тока серии ДПУ
Двигатели серии ДПУ предназначены для электроприводов постоянного тока металлорежущих станков с ЧПУ и промышленных роботов.
Основные технические данные двигателей ДПУ приведены в табл. 23.4.
Номинальный режим работы двигателей - S1 по ГОСТ 183-74.
|
80-3 |
ГО |
100-3 |
|
|
Показатель |
160-1 |
||
|
ДПУ |
ДПУ |
ч |
|
|
Мрмент, Н-м: |
|||
|
номинальный |
0,57 |
1,7 |
3,5 |
|
максимальный |
2,85 |
8,5 |
17,5 |
|
Номинальная частота враще- |
3000 |
3000 |
3000 |
|
ния, об/мин |
|||
|
Номинальное напряжение, В |
36 |
140 |
120 |
|
Номинальный ток, А |
7 |
5,3 |
12 |
|
Ток холостого хода, А |
. 2 |
2 |
2,3 |
|
КПД, % |
71,5 |
74,2 |
75 |
|
Сопротивление обмотки яко- |
0,5 |
2,2 |
0,53 |
|
ря при 20 °С, Ом |
|||
|
Индуктивность обмотки яко- |
0,5 |
1,13 |
0,53 |
|
ря, мГн |
Двигатели допускают работу в режиме S2 при частоте вращения п < 0,5ином, в режиме S3 с ПВ = 25 % и продолжительностью цикла 30 мин при п < 0,5ином, а также в режиме S5 с частыми пусками и электрическим торможением при коэффициенте инерции 2. В повторно-кратковременных режимах среднеквадратичное значение тока дви-
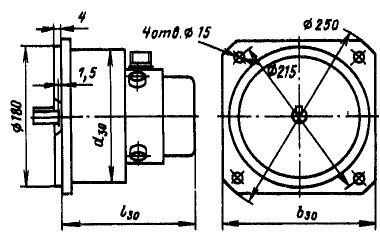
Таблица 23.5. Габаритные размеры, мм,
масса и момент инерции якоря двигателей
серии ДПУ
|
Тип двигателя |
«30 |
»зо |
/зо |
Масса, кг |
Момент инерции, гм2 |
|
ДПУ160-180-3-Д39 ДПУ160-180-3-Д39-09 ДПУ200-550-3-Д39 ДПУ2О0-500-3-Д39-О9 ДПУ240-1100-3-Д39 ДПУ240-1100-3-Д39-09 |
165 165 215 215 265 265 |
200 200 250 250 300 300 |
150 172 163 184 145 170 |
5 6 8,2 9,2 14,5 15,5 |
0,217 0,277 0,844 0,944 1,884 1,944 |
гателей за период не должно превышать номинального значения. Электродвигатели длительно выдерживают номинальный момент при частоте вращения от 0,1 до 3000 об/мин. На холостом ходу в течение 2 мин допустимо повышение частоты вращения до 5000 об/мин. Класс нагревостой-кости изоляции — F. Степень защиты от воздействий окружающей среды — IP44; способ охлаждения — IC040. Двигатели предназначены для эксплуатации в условиях воздействия механических факторов по группе М8 ГОСТ 17516-72. Габаритные размеры двигателей серии ДПУ, а также их масса и момент инерции якоря даны в табл. 23.5.
Структура условного обозначения двигателей серии ДПУ:
|
ДПУ |
X |
- X |
- X |
- Д39 |
- 09 |
- X |
|
1 |
г |
3 |
4 |
5 |
7 |
где 1 — название серии: ДПУ — двигатель постоянного тока управляемый; 2 — диаметр корпуса, мм; 3 — мощность, Вт; 4 — частота вращения, тыс. об/мин; 5 — условное обозначение повышенной точности по установочным размерам; 6 — 09 — условное обозначение наличия тахогенератора (в двигателях без тахогенераторов обозначение отсутствует); 7 — климатическое исполнение и категория размещения по ГОСТ 15150-69.
Предельные отклонения на биение выходного конца вала, центрирующей заточки и опорной поверхности фланца соответствуют повышенной точности по ГОСТ 9592-75.
Двигатели выпускаются со встроенными тахогенераторами постоянного тока типа ТП80-20-0,2. Двигатели мощностью 220 и 450 Вт могут изготовляться также со встроенными датчиками положения типа LTSa-11 с.
Основные технические данные тахогенератора постоянного тока с возбуждением от постоянных магнитов:
Крутизна выходной характеристики, мВ/(об/мин)...... 20
Частота вращения, об/мин:
номинальная.......3000
максимальная......6000
минимальная....... 0,1
Нагрузочное сопротивление, кОм,
не менее......... 10
Погрешность в диапазоне частот
0,1-4000 об/мин, %, не более 0,2 Выходное сопротивление постоянному току при температуре
20°С, Ом.........140 ± 14
Масса, кг..........0,5
Коэффициент пульсации выходного напряжения в зависимости от отношения частоты вращения к номинальной не должен превышать следующих значений, %:
От максимальной до 0,1 . . . . 0,2
От 0,1 до 0,01........ 1,5
От 0,01 до 0,001....... 2,5
Менее 0,001......... 5
Изменение ЭДС тахогенератора при изменении температуры окружающей среды должно быть не более 0,02 %/°С.
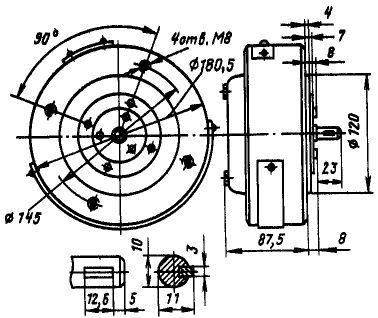
Габаритные и присоединительные размеры тахогенератора ТП80-20-0,2 даны на рис. 23.3, конструкция и способ соединения с двигателем — на рис. 23.4.
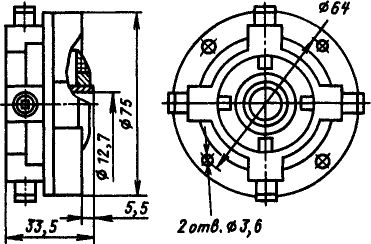
Рис. 23.3. Габаритные и установочно-при-
соединительные размеры тахогенератора
ТГОО-20-0,2
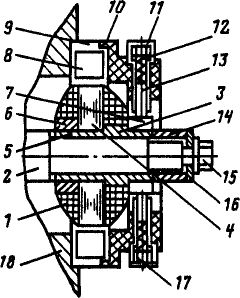
Рис. 23.4. Конструкция и способ соединения тахогенератора ТП80-20-0,2 с двигателем: 1 — обмотка якоря; 2 — вал двигателя; 3 — втулка; 4 — сердечник якоря; 5 — шайба; 6 — кольцо; 7 — коллектор; 8 — магнит; 9 - сегмент кольца; 10 -щеткодержатель; 11 — обойма щеткодержателя; 12 — пружина; 13 — щетка; 14 — втулка; 15 — гайка; 16 -шайба; 17 -винт; 18 - подшипниковый щит двигателя