
6. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Оно характеризуется следующими основными показателями:
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя пмакс к его минимальной частоте пмин :
Д = пмакс /пмин.
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных. Таким образом, асинхронный двигатель помимо естественной может иметь множество искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения выше и ниже естественной характеристики.
Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например, для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, условиями нормального пуска двигателя и др.
Регулирование частоты вращения асинхронных двигателей может производиться способом воздействия на него со стороны статора или со стороны ротора.
При воздействии со стороны статора существуют следующие основные способы регулирования частоты вращения:
введением и регулировкой сопротивления (резисторов) в цепи статора (реостатное регулирование);
изменением числа пар полюсов;
изменением частоты питающего напряжения.
При воздействии со стороны ротора регулирование частоты вращения производится:
введением и регулировкой активного сопротивления (резисторов) в цепи ротора (реостатное регулирование);
введением в цепь ротора добавочной э. д. с. с частотой, равной основной э. д. с. ротора.
Из указанных практическое применение нашли способы регулировки: реостатный, изменением полюсности обмотки статора и изменением частоты в питающей сети.
Реостатное регулирование частоты вращения асинхронных двигателей является одним из наиболее простых способов регулирования и может осуществляться введением добавочных активных сопротивлений (резисторов) в цепь статора Rд1 (рис. 24.а) или ротора Rд2 (рис. 24,б).
Однако первый способ не нашел широкого практического распространения из-за ряда существенных недостатков— снижения максимального (критического) момента и перегрузочной способности при увеличении сопротивления, малого диапазона регулирования частоты вращения и др. Данный способ регулирования применяется для ограничения пускового момента асинхронных двигателей с короткозамкнутым ротором, используемых, например, в приводах металлорежущих станков. Это необходимо для предотвращения ударов в механических передачах станков.
Для регулирования в широких пределах частоты вращения асинхронных двигателей с контактными кольцами используется введение дополнительных активных сопротивлений (резисторов) в роторную цепь (рис. 24,б). Эти резисторы Rд2 подсоединяются к выводам щеток контактных колец. При этом ток в роторной цепи снижается по мере увеличения сопротивления, что вызывает уменьшение электромагнитного момента. При снижении момента до величины, меньшей чем статический момент сопротивления на валу, М < Мс происходит уменьшение частоты вращения двигателя меньше первоначальной п < пЕ, т. е. увеличение скольжения s. В свою очередь это вызовет увеличение э. д. с. ротора Е2 [см. уравнение (13)], а значит, возрастут ток ротора I2 [см. формулу (25)] и электромагнитный момент двигателя М [см. формулу (43)]. Когда момент возрастет до М = Мс , изменение частоты вращения закончится и асинхронный двигатель станет работать в установившемся режиме с новой частотой п1 < пЕ .
При этом важно заметить, то изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента Ммакс (см. рис. 21). Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Если двигатель работает с некоторым приводимым механизмом на валу с статическим моментом сопротивления Мс (см. рис. 21), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка Е. При введении добавочных сопротивлений—резисторов R'д2, R''д2, R'''д2— в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы (точки 1, 2, 3) с меньшими величинами частот вращения пЕ > п1 > п2 > п3. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд2 становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Работа двигателя на естественной характеристике в данном случае будет наиболее стабильной и устойчивой. Это означает, что при изменении момента сопротивления Мс в процессе работы производственного механизма отклонения частоты вращения двигателя будут минимальными.
Технические показатели данного способа регулирования следующие.
Диапазон регулирования сравнительно небольшой — порядка 2:1 и ограничивается вероятностью нестабильности работы двигателя при больших значениях сопротивлений резисторов Rд2.
Плавность регулирования при реостатном регулировании небольшая и определяется числом ступеней регулирования. Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Изменение частоты вращения при реостатном регулировании возможно лишь вниз от основной.
Данный способ регулирования не экономичен, однако прост и удобен в эксплуатации.
Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора.
Как следует из формулы (7), при неизменной частоте в питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте в питающей сети, равной 60 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Изменение числа пар полюсов обычно достигается следующими способами:
1. На статоре двигателя укладываются две не связанные между собой обмотки, имеющие разное число пар полюсов, например p1 и р2. При подключении одной из обмоток к сети переменного тока, например, с числом полюсов р2 двигатель будет иметь синхронную частоту вращения, соответствующую данному числу полюсов (см. рис. 25, а):
| n2 = | 60f | . |
| p2 |
Другая обмотка при этом обесточена. При необходимости получения другой частоты вращения n1 обмотка с числом полюсов р2 отключается и включается с числом полюсов p1. Такие асинхронные двигатели получили название двухобмоточных.
2. На статоре укладывается одна обмотка, допускающая переключение на разное число полюсов. Наиболее широко распространены две схемы переключения статорной обмотки двухскоростных двигателей: с треугольника на двойную звезду Δ/YY и со звезды на двойную звезду Y/YY (звезду с двумя параллельными ветвями).
Схемы соединения обмоток Δ/YY применяются для получения примерно одинакового вращающего момента при обеих частотах вращения (рис. 25,а). Такие схемы применяются, например, у асинхронных двигателей привода компрессоров, металлорежущих станков и др. Схемы соединения обмоток Y/YY используются для приводов вентиляторов (рис. 25,б).
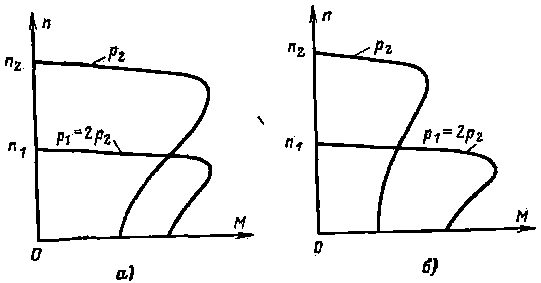 |
Рис. 25. Механические характеристики при регулировании частоты вращения асинхронных двигателей изменением числа пар полюсов при переключении статорной обмотки. а — треугольник (число пар полюсов 2p = p1 )—двойная звезда (2р = р2 ); б —звезда (2p = p1 ) — двойная звезда (2р = р2 ). |
Кроме рассмотренных вариантов двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотки, а в четырехскоростных две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин.
Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин.
Электродвигатели с короткозамкнутым ротором могут иметь ряд специфических ненормальностей из-за неправильного соотношения числа пазов статора Z1, ротора Z2 и числа полюсов 2р.
Ненормальности заключаются в том, что двигатель может «прилипать», т. е. не приходить во вращение при подключении к сети, или «застревать», т. е., начавши вращаться, останавливается на некоторой скорости, или при вращении сильно гудит.
Во избежание указанных явлений должны быть выдержаны следующие соотношения:
| Z2 ≠ Z1, Z2 ≠ 0,5Z1, Z2 ≠ 2Z1, Z2 ≠ 6pk, Z2 ≠ 6pk + 2p, Z2 ≠ Z1 ± p, |
Z2 = Z1 + 2p,
Z2 = 0,5Z1 ± p, Z2 = 2Z1 + 2p, Z2 = 6pk ±1, Z2 = 6pk±(2p±1), |
К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Регулирование частоты вращения асинхронных двигателей изменением частоты в питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода (рис. 26). При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя, что также следует из формулы (7).
Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети fн = 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения Uрег , чтобы обеспечить высокую жесткость механической характеристики.
При регулировании частоты вращения асинхронных двигателей за счет изменения частоты в питающей сети возможны обеспечения различных режимов работы: с постоянным вращающим моментом M = const ;
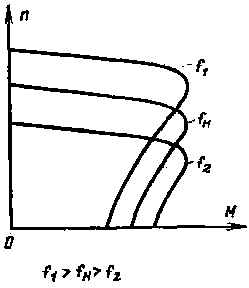 |
| Рис. 26. Механические характеристики при регулировании частоты вращения асинхронных двигателей с помощью изменения частоты питающего напряжения (с учетом влияния активного сопротивления статора). |
с постоянной мощностью на валу P = const;
с моментом, пропорциональным квадрату частоты,
M =— f 2.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер.
В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи, постоянные с использованием полупроводниковых и магнитных приборов (более подробно см. [Л. 2,4]). Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне, в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечиваются жесткость характеристик и высокая перегрузочная способность.
Недостатками данного способа регулирования можно считать большую сложность преобразовательного устройства, сравнительно высокую стоимость оборудования и др.
Однако в ряде случаев в приводах металлообрабатывающих и деревообрабатывающих станков, электроверетен, вентиляторов аэродинамических труб частотное регулирование является единственно возможным.
Кроме описанных существуют другие способы регулирования частоты вращения двигателей: каскадные схемы включения, несимметричное включение статорных и роторных обмоток, изменение питающего напряжения двигателя с помощью магнитных усилителей и тиристоров и другие, которые имеют меньшее распространение по сравнению с описанными выше.