
8. ВЫБОР АСИНХРОННЫХ ДВИГАТЕЛЕЙ ДЛЯ РАБОТЫ С ПРИВОДИМЫМИ МЕХАНИЗМАМИ
Выбор типа электродвигателя
Асинхронные двигатели общепромышленного исполнения наиболее широко используются в приводах переменного тока для производственных механизмов, не требующих регулирования скорости и работающих при длительной нагрузке — мощности, развиваемой электрической машиной в данный момент времени. Она обычно выражается в единицах мощности (кВт, квар, кВ∙А) либо в процентах или долях номинальной мощности.
Применяемый тип асинхронного двигателя во многом определяется условиями пуска рабочего механизма. При легких условиях пуска, т. е. при сравнительно небольшом моменте инерции, и моменте статического сопротивления на валу машины используются обычные короткозамкнутые асинхронные двигатели типов А2, АО2 (А, АО) и др. Такими механизмами можно считать машины с вентиляторным моментом на валу: насосы, вентиляторы (при закрытых задвижках) и т. п. Начальный момент трогания таких механизмов составляет примерно 10—40% номинального. Ориентировочные величины статических нагрузочных моментов на валу двигателей для ряда производственных механизмов приведены в табл. 4.
При тяжелых условиях пуска с начальным пусковым моментом сопротивления, равным номинальному или более, необходимо использовать асинхронные двигатели с повышенным пусковым моментом типа АОП2 (АОП), т. е. двигатели с глубоким пазом, а в наиболее тяжелых условиях — двигатели с двойной клеткой. К таким механизмам относятся глиномялки, плунжерные насосы, дробильные барабаны и др.
Для приводов механизмов с большими маховыми массами, с пульсирующей нагрузкой, с большой частотой пусков и реверсов нашли применение асинхронные двигатели с повышенным скольжением типа АОС2.
Т аблица 4
| Тип механизмов | Статический моментпри ω=0 | Статический момент при ω=0,95ω1 | Максимальный статический момент М |
| Поршневые компрессоры и насосы (пуск без нагрузки) | 0,25—0,4 | 0,25—0,4 | 1.5 |
| Центробежные насосы | 0,3—0,4 | 0.5—1 | 1.5 |
| Турбокомпрессоры, вентиляторы (пуск с закрытой задвижкой) | 0,2—0,3 | 0,2—0,3 | 1.5 |
| Шаровые мельницы: | |||
| сухого помола | 1—2 | 1 | 2.5 |
| мокрого помола | 0,2—0,5 | 1 | 2 |
| Дробилки (пуск под нагрузкой) | 2 | 1—1,5 | 3 |
| Двигатели-генераторы | 0,1—0,2 | 0,1-0,2 | 2 |
| Конвейеры, транспортеры | 1—1,5 | 1 | 2 |
| Блюминги, слябинги, рельсоба- лочные станы (пуск без нагрузки) | 0,35—0,5 | 0,2—0,3 | 2,5—3,5 |
| Мелкосортные и трубопрокатные станы | 0,6—1 | 0.4 | 2,5 |
| Листовые и жестекатальные станы:холодной прокатки | 2 | 1—1,5 | 2,5 |
| горячей прокатки | 1,25 | 1 | 3-5 |
Примечания: 1. ω — угловая скорость; ω1—угловая скорость вращения магнитного поля. 2. Величины моментов даны в относительных единицах (по отношению к номинальному моменту).
Важное значение для многих производственных механизмов имеет плавность пуска приводного электродвигателя. Для ограничения пускового момента и пускового тока используется искусственное снижение напряжения питания статора двигателя на время пуска. Это достигается за счет включения в цепь статора реактивных и активных сопротивлений (резисторов) или автотрансформатора. Первый способ используется для двигателей малой и средней мощности —для привода кранов, транспортеров, станков и некоторых других механизмов при включении активного сопротивления (резистора) в одну фазу статора. В тех случаях, когда требуется ограничение пускового тока и двигатель должен пускаться вхолостую или с малой нагрузкой на валу, используется схема включения резисторов во все три фазы двигателя (для низковольтных электродвигателей). Более подробно способы пуска двигателей описаны в § 5.
Когда мощность питающей сети недостаточна, для пуска электродвигателей с короткозамкнутым ротором применяются асинхронные двигатели с фазным ротором типов АК2, АОК2 и пусковыми сопротивлениями (резисторами) в цепи ротора.
В ряде отраслей, например в текстильной промышленности, для приводов механизмов с круглосуточным режимом работы, когда важное значение имеют энергетические показатели двигателя (к. п. д. и др.), используются асинхронные двигатели типов АО2-Т, АОЛ2-Т.
Наиболее характерные случаи эксплуатации и области применения асинхронных электродвигателей в нерегулируемых приводах различных механизмов приведены в табл. 5.
Таблица 5
| Характер нагрузки | Применяемые асинхронные двигатели | В каких механизмах используются двигатели |
| Длительная постоянная | Короткозамкнутые типов А2, АО2, А и АО до 100 кВт | Центробежные насосы станций, вентиляторы дымососов, мукомольные мельницы, агрегатные станки, транспортеры |
| Длительная переменная (без маховика) | Короткозамкнутые типов А2, АО2, А и АО или с фазным ротором ти пов АК2, АОК2 | Шаровые и угольные мельницы, дробилки, ка ландры, чесальные машины, поршневые насосы и компрессоры |
| Ударная (с маховиком на валу) | Короткозамкнутые, с повышенным скольжением типа АОС2 до 100 кВт | Молоты, ножницы, кривошипные прессы, прокатные станы, ковочные машины |
| Повторно-кратковременная | Короткозамкнутые, с повышенным скольжением типа АОС2 или с фазным ротором типов АК2, АОК2 | Краны, подъемные механизмы, лифты, механизмы металлургических производств |
В производственных машинах, требующих регулирования скорости с помощью электродвигателя, асинхронные двигатели используются в соответствии с рядом специфических требований. К таким техническим требованиям относятся — диапазон и плавность регулирования скорости, характер изменения нагрузочного момента и др. (более подробно см. § 6). Наиболее характерные примеры применения асинхронных двигателей в регулируемых приводах сведены в табл. 6.
Таблица 6
| Применяемые асинхронные двигатели | Способ регулирования частоты вращения | Зона регулирования | Плавность, диапазон регулирования | В каких производствах и механизмах используются двигатели |
| Коротко-замкнутые | Изменение частоты питающей сети | Вверх - вниз | Плавное регулирование | Вискозная промышленность - центрифуги; текстильная промышленность - прядильные машины; металлургия - роликовые транспортеры прокатных цехов |
| Переключение числа пар полюсов статора | Вверх | Ступенчатое, не более 3:1 | Металлорежущие станки, прессы со ступенчатым регулированием скорости | |
| С фазным ротором | Изменение сопротивления в цепи ротора | Вниз | Плавное при постоянном моменте нагрузки, не более 2:1 | Краны, вспомогательные механизмы в металлургии, насосы и дымососы с регулировкой производительности |
Выбор мощности двигателя
Одним из основных условий выбора электродвигателя является соответствие его мощности производственного механизма, приводимого во вращение. Для предварительного выбора двигателя нужно знать ориентировочные значения статических моментов сопротивления па валу механизма при подсинхронной угловой скорости вращения ротора (ω = 0,95ω1), а также нагрузочный статический момент (см. табл. 4).
Факторами, определяющими выбор двигателя, являются также режим его работы. Различают нагрузки: продолжительную, практически постоянную; длительную переменную; кратковременную; повторно-кратковременную.
Продолжительный режим работы с практически постоянной нагрузкой характеризуется тем, что температура всех частей электродвигателя при неизменной температуре окружающей среды достигает некоторых установившихся значений. Температура охлаждающей среды для электродвигателей нормального исполнения в соответствии с ГОСТ 183-66 не должна превышать 40°С. В случае превышения температуры охлаждающей среды нагрузку электродвигателя необходимо снизить. Для работы в условиях с температурой ниже 40 °С нагрузка двигателей может быть несколько повышена.
Допустимая нагрузка двигателя, соответствующая изменению температуры охлаждающей среды, определяется его конструкцией, главным образом системой и устройством вентиляции, и указывается заводом-изготовителем. Однако для асинхронных двигателей единых серий А, АО, А2 и АО2 можно руководствоваться следующими ориентировочными данными:
| Температура охлаждающей среды, °С | 30 | 35 | 40 | 45 | 50 |
| Изменение нагрузки по отношению к номинальной, % | +10 | +5 | 0 | -8 | -20 |
При нормальной температуре окружающей среды и работе электродвигателя продолжительно с постоянной нагрузкой должно обеспечиваться условие равенства номинальной мощности двигателя Рн (паспортной) и мощности нагрузки Рс (фактической), т. е. Рн ≈ Рс. Длительная переменная нагрузка. В этом случае номинальный, требующийся по условиям перегрузки ток электродвигателя Iн.пер должен быть не менее отношения максимального тока Iмакс к кратности допустимой перегрузки по току mI:
Iн.пер ≥ Iмакс /mI .
Номинальный ток двигателя, требуемый с точки зрения его нагрева при работе Iн. экв, должен быть не менее эквивалентного фактического тока двигателя I экв, а именно: Iн.экв ≥ I экв .
Величина эквивалентного тока для некоторого графика переменной по току нагрузки (рис. 30,а) может быть найдена из выражения, А:
|
Паспортная величина номинального тока (А) выбранного электродвигателя должна быть не менее каждой из полученных величин Iн.пер и Iн.экв.
Кроме того, должны обеспечиваться условия работы по моменту на валу электродвигателя:
1) для номинального момента, требуемого по условию перегрузки,
Мн.пер ≥ Ммакс /тм ,
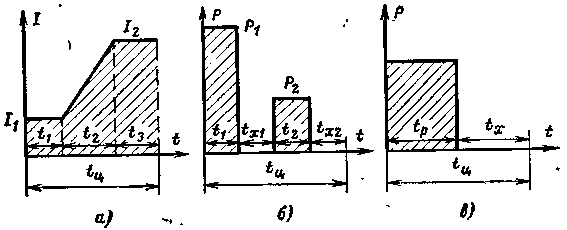 |
Рис. 30. Графики работы асинхронного двигателя. а — режим с переменной нагрузкой по току; б — повторно-кратковременный режим по мощности; в — эквивалентный режим работы. |
2) для номинального момента, требуемого по условию нагрева, Паспортная величина номинального момента выбранного электродвигателя должна быть не менее каждой из полученных величин Мн.пер и Мн.экв. Для асинхронных электродвигателей справедливо соотношение
Кратковременная нагрузка асинхронного короткозамкнутого двигателя. В этом случае выбор мощности двигателя производится с точки зрения возможности его запуска по минимальному моменту Ммин(Н∙м), развиваемому двигателем при пуске, из выражения
| Mн = | Mcqуск | . |
| qмин qU |
Таблица 7
| Тип асинхронного электродвигателя | Значение λ |
| Короткозамкнутый С фазным ротором С повышенным скольжением С двойной клеткой или глубоким пазом |
1,8—2 2—2,5 2—3 1,8—2,7 |
Повторно-кратковременный режим характеризуется периодами работы с постоянной нагрузкой (рабочие периоды) и периодами отключения электродвигателя (паузы). При этом температура отдельных частей машины при неизменной температуре окружающей среды не успевает достигнуть практически установившихся значений. В таком случае выбор электродвигателей осуществляется:
1) из серии двигателей единой серии нормального исполнения. Выбор мощности двигателя ориентировочно производится аналогично случаю длительной перемен¬ной нагрузки. При более точных расчетах необходимо учитывать влияние ухудшения условий охлаждения двигателя [Л. 4];
2) из специальных электродвигателей, предназначенных для работы в повторно- кратковременном режиме (крановые и металлургические двигатели типа МТ, МТК и др.). При этом производится пересчет заданного графика повторно-кратковременного режима (см. рис. 30,б) в некоторый эквивалентный график (рис. 30,в). Рабочая (действительная) мощность нагрузки при повторно-кратковременном режиме Рпк( (Вт) находится из выражения
|
εпк = |
tр | = | t1+ t2 | , |
| tц | tц |
В остальных случаях используются значительно более сложные расчеты [Л. 4].
Расчет допустимой частоты включений
Асинхронные короткозамкнутые двигатели, рассчитанные на длительный режим работы, при работе в повторно-кратковременном режиме с большим числом включений в течение определенного времени имеют ограниченное допустимое число включений в час h, которое зависит от фактической нагрузки электродвигателя, от соотношения между временем работы tp (с) и паузы-остановки — tx(с), а также от величии потерь энергии в двигателе за время разбега ΔАр (Дж) и торможения ΔАт (Дж). Эти потери в переходные периоды, когда частота вращения машины меньше номинальной, значительно превышают потери энергии в двигателе при работе с постоянной частотой вращения. Кроме того, при неподвижном роторе в период паузы ухудшается теплоотдача двигателя, что учитывается при расчете введением некоторого коэффициента у. Этот коэффициент зависит от способа вентиляции двигателей и может быть принят следующим: для закрытого двигателя с независимым охлаждением 0,9—1,0; для закрытого двигателя с охлаждением от собственного вентилятора 0,45—0,55; для защищенного двигателя с самовентиляцией 0,25—0,35.
Ограничение по частоте включений двигателя вводится для того, чтобы не допустить чрезмерный перегрев его. Значение h можно определить из следующего выражения, которое используется в основном для двигателей малой мощности до 10—15 кВт:
| h = 3600 | (Δpн - Δpс )ε + Δpнγ(1 - ε) | . |
| 0.97(ΔAр + ΔAт ) |
При работе асинхронного двигателя с номинальной нагрузкой допустимое число включений в час равно:
| h = 3600 | Δpнγ(1 - ε) | . |
| 0.97(ΔAр + ΔAт ) |
Допустимая частота включений во многом зависит от момента инерции ротора двигателя. С увеличением мощности двигателя возрастает его момент инерции и величина h уменьшается. Мощность двигателей механизмов с большими статическими моментами сопротивления выбирают больше номинальной мощности механизма для сокращения времени пуска.
На практике не рекомендуется использование асинхронных электродвигателей общего назначения для частого пуска механизмов, имеющих приведенный момент инерции значительно больший, чем момент инерции самого двигателя. Так, для короткозамкнутых двигателей при максимально допустимом статическом моменте сопротивления механизма разрешается не более двух пусков подряд из холодного состояния.
Мощность двигателей для привода общепромышленных механизмов
Мощность Р, необходимая для приведения в действие и обеспечения нормальной работы производственного механизма, определяется по его параметрам (например, производительности Q и др.) и эксплуатационным характеристикам (например, коэффициент полезного действия механизма — η) в соответствии с особенностями того технологического процесса, в котором используется данный механизм. Ниже приводятся формулы для расчета требуемой мощности двигателей ряда наиболее распространенных производственных механизмов.
Мощность двигателя насоса, кВт,
| P = | γQ(H + ΔH ) | . |
| 102ηηп |
Мощность двигателя вентилятора, кВт,
| P = | QHc | . |
| 1000ηηп |
Мощность двигателя компрессора, кВт,
| P = | 2QA'a10-3 | . |
| ηηп |
Мощность двигателя подъемного крана, кВт,
| P = | (G + G0 )v | . |
| 1000η |
Выбор двигателя по конструктивному исполнению
При выборе электродвигателя необходимо учитывать условия его эксплуатации, т. е. температуру, влажность, запыленность помещения, в котором он будет работать, наличие едких газов и др. В соответствии с условиями окружающей среды выбирается конструктивное исполнение по способу защиты от внешних воздействий, а также по способу охлаждения (см. § 2). Кроме того, при выборе необходимо учитывать способ установки и крепления электродвигателя, возможность соединения с производственным механизмом и пр.