
§ 5.10. ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР-ПОСТРОИТЕЛЬ
Трансформатор-построитель можно использовать для определения гипотенузы прямоугольного треугольника по двум заданным катетам, для преобразования координат из декартовой системы в полярную и из одной декартовой системы, в другую, повернутую на некоторый угол а. В таком трансформаторе обмотки статора В и К присоединяют к однофазной сети и подают на них напряжения различного значения Uв и Uк (рис. 5.30). Одну из обмоток ротора, например S, присоединяют к измерительному прибору V, а другую - С - к управляющей обмотке У исполнительного двигателя ИД. Обмотка S является выходной.
Обмотки статора В и К создают в трансформаторе результирующий магнитный поток, продольная и поперечная составляющие которого
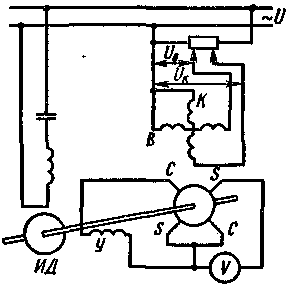 |
| Рис. 5.30. Схема вращающегося трансформатора-построителя |
Фdm ≈ Uв /(4,44f1 w1 ko61);
Фqm ≈ Uк /(4,44f1 w1 ko61).
Если машина не насыщена, то результирующий поток
|
В обмотке ротора С результирующий поток Фрез индуцирует ЭДС
ЕС = 4,44f1 w2 ko62 Фрез m cos γ,.
ЕS = 4,44f1 w2 kоб2 Фрез m sin γ..
ЭДС ЕС подается на управляющую обмотку исполнительного двигателя ИД, который вращает ротор вращающегося трансформатора до тех пор, пока ЭДС ЕС не станет равной нулю. Таким образом, ротор остановится, когда угол у станет равным 90°. В этом случае
Uвых ≈ ЕS max = 4,44f1 w2 kоб2 Фрез m = k√Uв2 + Uк2.
Таким образом, измерительный прибор, присоединенный к обмотке S, при неподвижном роторе показывает напряжение, пропорциональное гипотенузе прямоугольного треугольника, катеты которого пропорциональны Uв и Uк.
Если требуется перейти от декартовой системы координат к полярной, то напряжение Uвых можно рассматривать как модуль вектора, заданного в декартовой системе координат проекциями Uв и Uк . Аргумент вектора определяется углом, на который ротор повернется относительно статора.
При необходимости преобразования координат некоторого вектора А из одной декартовой системы в другую, повернутую относительно первой на угол ос, необходимо оси обмоток ротора повернуть относительно осей обмоток статора на угол α, а затем на обмотки В и К подать напряжения, пропорциональные проекциям Ах и Ау вектора A→ в первой координатной системе. В этом случае ЭДС, индуцируемые в обмотках ротора S и С, пропорциональны проекциям А'х и А'у вектора А→ в новой системе координат.
Точность вращающихся трансформаторов. Ее характеризуют следующие показатели:
а) максимальная погрешность воспроизведения требуемой зависимости, выраженной в процентах от максимального значения выходного напряжения; эта погрешность находится в пределах: для синусно-косинусного трансформатора — от 0,005 до 0,2 %; для линейного трансформатора — от 0,05 до 0,2%;
б) максимальная асимметрия нулевых точек (для синусно-косинусного транёформатора). Для ее определения на обмотки В и К статора (попеременно) подают питание, после чего) определяют углы, при которых ЭДС обмоток ротора равны нулю (или минимальны). Максимальное отклонение этих углов; от углов, кратных 90°, дает ошибку асимметрии, которая для выпускаемых промышленностью вращающихся трансформаторов составляет от 0,16 до 7 угловых минут;
в) максимальное значение остаточной ЭДС, выраженной в процентах от максимальной ЭДС соответствующей обмотки, которая составляет 0,003—0,1%;
г) максимальное значение ЭДС компенсационной обмотки при питании обмотки возбуждения, выраженной в процентах от значения напряжения питания; она составляет от 0,04 до 1,2 %;
д) максимальная разность коэффициентов трансформации, которая не должна превышать 0,005—0,2%.
В зависимости от значений перечисленных показателей вращающиеся трансформаторы делят на шесть классов точности. Точность их в основном определяется тщательностью конструктивной проработки и качеством изготовления машин. Однако даже хорошо изготовленный вращающийся трансформатор может дать неудовлетворительную точность при недостаточно продуманной схеме включения его обмоток, не соответствующей режиму работы в эксплуатации. Необходимо также использовать источники питания со стабилизированным напряжением и частотой и по возможности уменьшать влияние нагрева обмоток на значение их активного сопротивления (применять различные методы термокомпенсации).