
§ 7.6. ШАГОВЫЕ (ИМПУЛЬСНЫЕ) ДВИГАТЕЛИ
Принцип действия. Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемое шагом. Коммутатор преобразует заданную последовательность управляющих импульсов в т-фазную систему одно- или двухполярных прямоугольных импульсов напряжения;
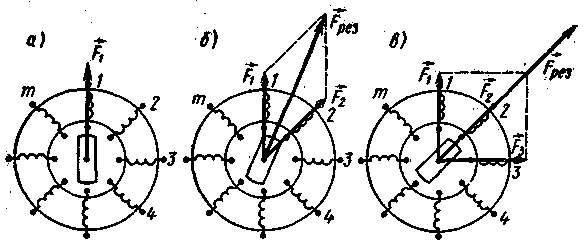 |
Рис. 7.15. Схемы работы шагового двигателя при питании различных фаз обмотки якоря |
На рис. 7.15 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе. Если фазы 1, 2, 3,...,m обмотки якоря рассматриваемого двигателя питаются поочередно однополярными импульсами напряжения, то ротор двигателя скачкообразно перемещается в положения, при которых его ось совпадает с осями фаз 1,2, 3 и т. п. Следовательно, ротор имеет m устойчивых состояний, соответствующих направлению вектора МДС F→1 (рис. 7.15, а) обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m.
Для увеличения результирующей МДС якоря, а следовательно, магнитного потока и синхронизирующего момента обычно одновременно подают питание на две, три и большее количество фаз. Так, например, если одновременно подают питание на две фазы, то положение результирующего вектора МДС F→peз и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 7.15,б). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 7.15, в). Если поочередно включают то четное (две), то нечетное (одна, три) число фаз, то ротор двигателя имеет 2m устойчивых состояния и шаг равен π/m. Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т, п., называют симметричным; поочередное включение неравных групп фаз — несимметричным.
В качестве шаговых обычно применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индукторные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
 |
|
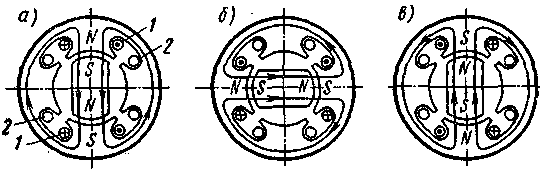
| Рис. 7.16. Положения ротора шагового двигателя с постоянными магнитами при различных полярностях включения его фаз и диаграмма изменения тока в этих фазах | 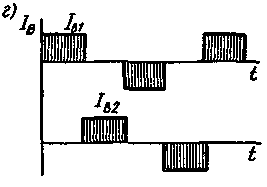 |
Применение шагового двигателя целесообразно для привода механизмов, имеющих старт-стопное движение, или механизмов с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов (лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т. п.).
Двигатели с постоянными магнитами. Ротор двигателя (рис. 7.16) выполняют в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явно выраженные полюсы, вокруг которых в полузакрытых пазах размещаются катушки обмотки якоря (двух-, трех- или четырехфазной). В многополюсных машинах число пазов на полюс и фазу q = 1, т. е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
В двигателе с двухфазной обмоткой якоря при последо-вательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 7.16, а, б, в). В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т.е. делает шаг, равный 90°. Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения. В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
- ток в фазе 1 направлен от начала к концу; фаза 2 обесточена;
- ток в фазе 2 направлен от начала к концу; фаза 1 обесточена;
- ток в фазе 1 направлен от конца к началу; фаза 2 обесточена;
- ток в фазе 2 направлен от конца к началу; фаза 1 обесточена.
Порядок переключения (коммутации) фаз 1 и 2 обмотки якоря представлен на рис. 7.16, г в виде временной диаграммы; изменения токов Iв1 и Iв2 в этих фазах. Каждому импульсу тока соответствует определенное положение ротора двигателя. Рассмотренную систему переключения фаз 1 и 2 обмотки якоря называют четырехтактной разнополярной коммутацией и сокращенно обозначают следующим образом: (+1)-(+2)-(-1)-(-2)-(+1) - .... Каждым четырем тактам соответствует поворот ротора на два полюсных деления. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
αш = 360/(kp),
n2 = 60f1αш /360 = 60f1 /(kp).
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0 — 500 Гц; максимальной частоте соответствует частота вращения n2 max = 2000 ÷ 3000 об/мин. В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)-(+2)(-1)-(-1)(-2)-(-2)(+1)-(+1)(+ 2) - .... Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза.
Обычно шаговые двигатели имеют четырехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения; это упрощает конструкцию электронного коммутатора. При подключении к электронному коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой. Коммутацию четырехфазной обмотки обычно выполняют четырехтактной, парной: (12)-(23)-(34)-(41)-(12)- ..., вследствие чего обеспечивается такое же увеличение вращающего момента, что и при попарной разнополярлой коммутации двухфазной обмотки. Шаговые двигатели с трехфазной обмоткой требуют шеститактной разнополярной коммутации.
Реактивные двигатели. Ротор реактивного шагового двигателя выполняют из магнитномягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора. Шаговые двигатели этого типа называют также параметрическими. На рис. 7.17, а, б и в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 7.17, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 7.17,б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 7.17, в. Таким образом, коммутация обмоток
 |
|
| Рис. 7.17. Положения (ротора реактивного шагового двигателя при различных полярностях включения фаз и диаграмма изменения тока в этих фазах | 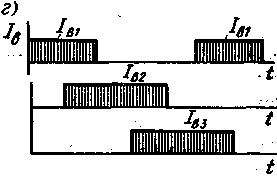 |
Шаг двигателя можно уменьшить, увеличив число выступов на роторе. Например, применяя шаговый двигатель с крестообразным ротором, при той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 7.17, получают шаг, равный 15°. Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить, увеличив число выступов на статоре и роторе, т. е, перейдя к схеме редукторного двигателя (см. рис. 7.11).
При малом шаге (5 — 1°) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
Двигатели с подмагничиванием (индукторные). По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля обычно образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием.
Индукторные шаговые двигатели с подмагничиванием имеют несколько лучшие характеристики, чем реактивные — больший электромагнитный момент, лучшую устойчивость и т. п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.
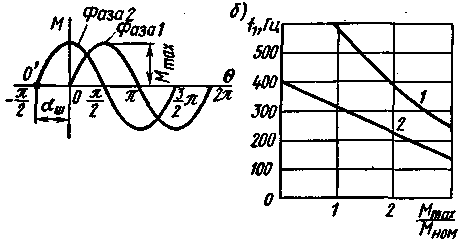 |
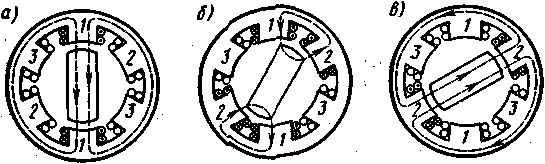
Рис. 7.18. Рабочие характеристики шагового двигателя |
Режимы работы шаговых двигателей. Для работы шагового двигателя характерным является регулирование частоты вра-щения в широком диапазоне путем изменения частоты подачи управляющих импульсов тока. Таким же способом осуществляют его фиксированный останов, пуск и изменение направления вращения. В зависимости от частоты управляющих импульсов различают следующие режимы работы шаговых двигателей: статический, квазистационарный, установившийся и переходные.
Статический режим — это режим прохождения по обмоткам возбуждения постоянного тока, создающего неподвижное поле. При питании одной фазы зависимость электромагнитного момента М от угла рассогласования θ близка к синусоидальной (рис. 7.18, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1,5°, статическая ошибка составляет не более 0,5°.
Квазистационарный режим — это режим отработки единичных шагов, например в приводах различных стартстопных, лентопротяжных и других подобных механизмов. Предельная частота квазистационарного режима ограничена временем затухания колебаний ротора, которые могут возникнуть при переходе ротора из одного устойчивого положения в другое (точки О и О' на рис. 7.18, а), аналогично тому, как это происходит в обычной синхронной машине при резком изменении угла θ. Для устранения колебаний ротора в конце шага применяют различные демпфирующие устройства и обгонные муфты. Предельную частоту квазистационарного режима повышают, увеличивая число фаз обмотки якоря или число тактов коммутации (восьмитактная коммутация при четырехфазной обмотке, шеститактная — при трехфазной). Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Установившийся резким — это режим, соответствующий постоянной частоте управляющих импульсов. Ротор двигателя в установившемся режиме имеет постоянную частоту вращения, но при переходе из одного устойчивого состояния в другое возникают периодические и апериодические колебания относительно мгновенной точки устойчивого равновесия. При частоте управляющих импульсов f1, меньшей частоты свободных колебаний двигателя f0, угловое перемещение ротора при каждом шаге, как и квазистационарном режиме, сопровождается свободными колебаниями, которые существенно увеличивают динамическую ошибку при отработке ротором заданного перемещения. Частота свободных колебаний ротора
f0 ≈ 0,135√Mmax p /(Jр + Jн ),
М = Мсн + Мт = Mmax sin θ + Ddθ/dt.
Параметр D называют коэффициентом внутреннего демпфирования. Физически внутреннее демпфирование, т. е. тормозной момент Мт в двигателях с постоянными магнитами или обмоткой возбуждения на роторе, возникает в результате взаимодействия, вращающегося потока ротора с током в обмотке якоря (см. § 7.2). У реактивных двигателей этот момент зависит от разности индуктивных сопротивлений (Хd - Xq) обмотки якоря и ее активного сопротивления Ra . При достаточно большом значении коэффициента D происходит эффективное затухание колебаний ротора двигателя. Этому способствует также наличие трения и внешних демпфирующих устройств.
Переходные режимы — основные эксплуатационные режимы шаговых двигателей, включающие в себя пуск, торможение, реверс, переход с одной частоты на другую. Основным требованием, предъявляемым к шаговым двигателям в переходных режимах, является сохранение синхронизма при изменении частоты управляющих импульсов — отсутствие потери шага.
Для каждого шагового двигателя существует некоторая предельная частота подачи управляющих импульсов fпр , при которой ротор еще следует за скачкообразно изменяющимся полем статора. Эту частоту называют частотой приемистости. Частота приемистости характеризует пусковые свойства шагового двигателя — максимальную частоту управляющих импульсов, при которой возможен пуск без выпадения из синхронизма. Она возрастает с увеличением синхронизирующего момента, уменьшением углового шага, нагрузки и момента инерции.
Для современных шаговых двигателей при номинальной нагрузке частота приемистости fпр = 100 ÷ 1000 Гц. Предельная частота, при которой осуществляется торможение шагового двигателя без потери шага (с сохранением синхронизма), как правило, выше частоты приемистости: это объясняется влиянием внутреннего демпфирования, момента нагрузки и момента трения. Предельная частота реверса, при которой реализуется реверс без выпадения из синхронизма (без потери шага) составляет (0,2 ÷ 0,5)fпр . Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
Рабочие характеристики шаговых двигателей. Они определяются параметрами двигателя, нагрузки (нагрузочный момент и момент инерции) и особенностями электронного коммутатора (числом тактов коммутации, формой его выходного напряжения и пр.). Основными характеристиками являются: статическая, предельная механическая и предельная динамическая характеристики приемистости.
Статическая характеристика — это зависимость электромагнитного момента М от угла θ (рис. 7.18, а), а также зависимость тока двигателя от нагрузки в квазистационарном режиме.
Предельная механическая характеристика — это зависимость частоты управляющих импульсов от максимального момента на валу ротора, при котором происходит выпадение двигателя из синхронизма (рис. 7.18,б, кривая 1). Ее снимают при плавном увеличении частоты f1.
Предельная динамическая характеристика приемистости — это зависимость частоты приемистости fпр в динамическом режиме (например, при пуске) от момента нагрузки М (рис. 7.18,б, кривая 2). Рабочие характеристики снимают при различных сочетаниях включаемых обмоток, моментах инерции двигателя и нагрузки и пр.
Области применения. При высоких частотах вращения (2000—3000 об/мин) применяют шаговые двигатели с постоянными магнитами на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. У этих двигателей номинальный вращающий момент Мном = 0,1 ÷ 10 Н•см, угловой шаг αш = 15°. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора. Их номинальный момент Мном = 1 ÷ 25 Н•см, а угловой шаг αш = 1,5 ÷ 3°.