
§ 8.12. ПРИНЦИПЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ
Способы регулирования частоты вращения. Частота вращения двигателя постоянного тока
п = [U - Iа(ΣRа + Rдо6 )]/(сеФ).
Следовательно, ее можно регулировать тремя способами: 1) включением добавочного реостата Rдоб в цепь обмотки якоря; 2) изменением магнитного потока Ф; 3) изменением питающего напряжения U.
На примере двигателя с параллельным возбуждением рассмотрим принципиальные особенности, свойственные этим способам регулирования.
Включение реостата в цепь якоря. При включении реостата в цепь якоря частота вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата:
| n = | U - Ia(∑Ra + Rдоб ) | = | U | - | Ia(∑Ra + Rдоб ) | = n0 - Δn. |
| ceФ | ceФ | ceФ |
Это показано на рис. 8.66, где приведены скоростные и механические характеристики двигателя с параллельным возбуждением: 1 — естественная (при Rдоб = 0); 2 — реостатная (при Rдоб > 0). Частоты вращения при холостом ходе для обеих характеристик равны, значения An (уменьшение частоты вращения при нагрузке) различны. При одном и том же токе якоря Δnест /Δnреост = ΣRa /(ΣRa + Rдоб ). Чем больше добавочное сопротивление Rдоб , тем круче с увеличением нагрузки падает частота вращения.
Механические характеристики n = f(M) двигателя с параллельным возбуждением можно получить из скоростных характеристик n = f(Ia) путем изменения масштаба по оси абсцисс, так как для двигателя этого типа М = сМФIa = cIa (момент пропорционален току якоря).
Основным недостатком данного метода регулирования является возникновение больших потерь энергии в реостате (особенно при низких частотах вращения), что видно из соотношения
Δп/п0 = Ia(ΣRa + Rдоб)/U = Ia2(ΣRa + Rдоб)/(UIa) = ΔРэл /Р1,
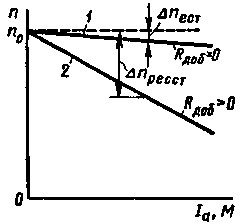 |
Рис. 8.66. Скоростные и механические характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем включения реостата в цепь якоря |
Решая уравнение (8.109) относительно ΔРэл , получаем
ΔРэл = Р1Δп/п0 = Р1 (п0 - п)/п0,
Очевидно, что данный способ позволяет только уменьшать частоту вращения (по сравнению с частотой при естественной характеристике). Иногда существенным является то обстоятельство, что при включении в цепь якоря значительного сопротивления характеристики двигателя становятся крутопадающими (мягкими), вследствие чего небольшие изменения нагрузочного момента приводят к большим изменениям частоты вращения.
Изменение магнитного потока. Чтобы изменить магнитный поток, необходимо регулировать ток возбуждения двигателя. При различных магнитных потоках Ф1 и Ф2 частота вращения определяется формулами
|
} |
В двигателе с параллельным возбуждением, например, частота вращения при холостом ходе и падение частоты вращения изменяются обратно пропорционально изменению магнитного потока:
п02/п01 = Δп2/Δп1 = Ф1/Ф2.
Таким образом, скоростные характеристики 1 и 2 двигателя при различных магнитных потоках Ф1 и Ф2 не являются параллельными (рис. 8.67,а). Эти характеристики пересекаются в точке А при частоте вращения, равной нулю, так как в данном случае ток Iак не зависит от потока:
Iак = U/ΣRa
Механические характеристики для двигателя с параллельным возбуждением строят на основании следующих соображений. Каждая из механических характеристик является практически линейной (если пренебречь реакцией якоря) и может быть построена по двум точкам: точке холостого хода, в которой момент равен нулю, и точке короткого замыкания, в которой момент максимален.
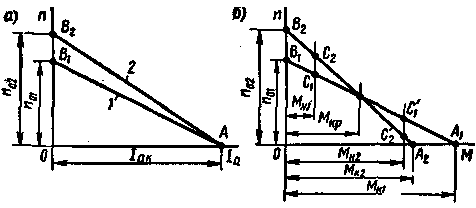 |
Рис. 8.67. Скоростные и механические характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока |
Сравнивая моменты при коротком замыкании, соответствующие различным значениям магнитного потока, получаем
Мк1/Мк2 = сМФ1Iак /(сМФ2Iак) = Ф1/Ф2.
Таким образом, с уменьшением магнитного потока частота вращения при холостом ходе возрастает, а момент при коротком замыкании снижается. Следовательно, механические характеристики, построенные при различных значениях магнитного потока, пересекаются при некотором значении момента Мкр и частоте вращения, меньшей частоты вращения при холостом ходе, но большей нуля (рис. 8.67, б). Из рассмотрения механических характеристик видно, что при значениях нагрузочного момента, меньших Мкр , уменьшение потока ведет к увеличению частоты вращения (см. точки С1 и С2 при нагрузочном моменте Mн1). При значениях нагрузочного момента, больших Мкр , уменьшение потока приводит к уменьшению частоты вращения (см. точки С'1 и С'2 при нагрузочном моменте Mн2).
В двигателях параллельного возбуждения средней и большой мощности уменьшение потока используют для повышения частоты вращения (рис. 8.68,а). В микродвигателях, наоборот, магнитный поток уменьшают для снижения частоты вращения.
Аналогично располагаются и механические характеристики у двигателей с последовательным возбуждением; в двигателях большой и средней мощности при уменьшении магнитного потока частота вращения возрастает рис. 8.68,б).
Уменьшение магнитного потока в двигателях последовательного возбуждения осуществляют путем включения регулировочного реостата Rp.в параллельно обмотке возбуждения ОВ (рис. 8.69), вследствие чего ток возбуждения
Iв = Iа Rp.в /(Rв + Rp.в ) = βIа ,
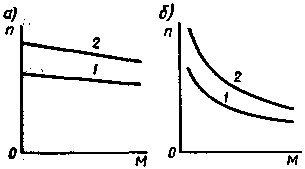 |
Рис. 8.68. Механические характеристики двигателей: 1 — при нормальном возбуждении; 2 — при уменьшении магнитного потока |
При включении реостата Rp.в параллельно обмотке возбуждения требуемое распределение тока Iа между обмоткой и реостатом обеспечивается только при стационарном режиме. При переходных процессах, когда токи Iа и Iв изменяются, в обмотке возбуждения возникает значительная ЭДС самоиндукции, под действием которой ток Iв уменьшается по сравнению с его значением при стационарном режиме, а ток Iр.в возрастает, т. е. происходит значительное ослабление возбуждения. Наиболее опасен этот режим для двигателей электрифицированного транспорта (электровозов, электропоездов, трамваев, троллейбусов). При отключении двигателя от сети и последующем включении (при отрыве токоприемника от контактного провода) в первый момент почти весь ток Iа идет по реостату Rp.в , a ток Iв весьма мал. Это приводит к значительному возрастанию тока Iа из-за резкого уменьшения ЭДС Е, индуцированной в обмотке якоря. Практически при этих условиях возникает резкий бросок тока Iа, сопровождающийся нарушением нормальной коммутации и образованием кругового огня.
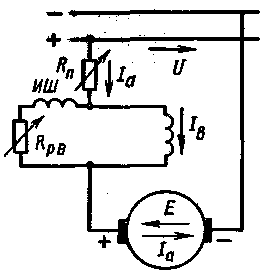 |
| Рис. 8.69. Схема включения регулировочного реостата в двигателе с последовательным возбуждением |
Чтобы обеспечить при переходных процессах такое же распределение тока Iа между обмоткой возбуждения и реостатом Rp.в , как и при стационарном режиме, последовательно с реостатом включают индуктивный шунт ИШ (катушку с ферромагнитным сердечником). Индуктивность его выбирают так, чтобы отношение индуктивностей реостата и обмотки возбуждения было приблизительно равно отношению их сопротивлений.
Рассмотренный способ регулирования весьма прост и экономичен, поэтому его широко применяют на практике. Однако при этом регулирование частоты вращения можно осуществить только в сравнительно небольшом диапазоне; обычно nmax /nmin = 2 ÷ 5. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток. Верхний предел nmax определяется условиями устойчивости (при сильном уменьшении Ф двигатель идет в «разнос»), а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и возрастает реактивная ЭДС, что повышает опасность возникновения искрения на коллекторе и появления кругового огня. Поэтому двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, должны иметь компенсационную обмотку и пониженное значение реактивной ЭДС при номинальном режиме.
Изменение питающего напряжения на зажимах якоря. При изменении питающего напряжения от U1 до U2 частоты вращения определяются соответственно формулами
В двигателе с параллельным возбуждением частота вращения при холостом ходе изменяется пропорционально изменению напряжения, т. е. n02/n01 = U2/U1, а уменьшение частоты вращения, обусловленное воздействием нагрузки, при Мн = const остается неизменным: Δn1 = Δn2 = const. В связи с этим скоростные характеристики двигателя с параллельным возбуждением представляют собой семейство параллельных прямых 1, 2 и 3 (рис. 8.70, а). Механические характеристики n = f(M) получаются из скоростных путем изменения масштаба оси абсцисс, так как момент пропорционален току якоря.
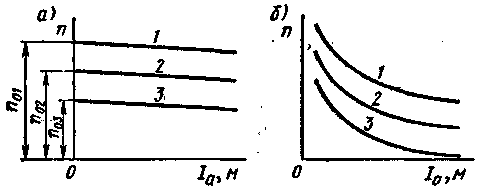 |
Рис. 8.70. Скоростные и механические характеристики двигателей при регулировании частоты вращения путем изменения напряжения на зажимах якоря |
Скоростные и механические характеристики двигателя с последовательным возбуждением строят аналогично (рис. 8.70, б). Регулирование частоты вращения двигателя путем измене¬ния напряжения на зажимах якоря обычно ведут «вниз», т. е. уменьшают напряжение и частоту вращения по сравнению с номинальными.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Как следует из (8.84), это можно осуществить двумя способами: путем изменения направления тока Iа в обмотке якоря или изменения направления магнитного потока Ф, т. е. тока возбуждения. Для этого переключают провода, подводящие ток к обмотке якоря или обмотке возбуждения.