
§ 7.5. ГИСТЕРЕЗИСНЫЙ ДВИГАТЕЛЬ
Принцип действия и устройство. Гистерезисным двигателем называют синхронный двигатель, вращающий момент которого создается за счет явления гистерезиса при перемагничивании ферромагнитного материала ротора. Статор в гистерезисном двигателе (рис. 7.12, а) выполняется так же, как и в других машинах переменного тока; обмотка статора может быть трех- или двухфазной (с конденсатором в одной из фаз). Ротор двигателя (рис. 7.12,б) представляет собой стальной цилиндр, выполненный из магнитно-твердого материала (имеющего широкую петлю гистерезиса) без обмотки. Применение обычной электротехнической стали для изготовления ротора не позволяет получить достаточно большой электромагнитный момент, поэтому используют специальные магнитно-твердые сплавы. Для экономии дорогих специальных сплавов роторы гистерезисных двигателей выполняют сборными: в виде массивного или шихтованного (из отдельных изолированных пластин) кольца из кобальтовой стали, насаженного на стальную или алюминиевую втулку.
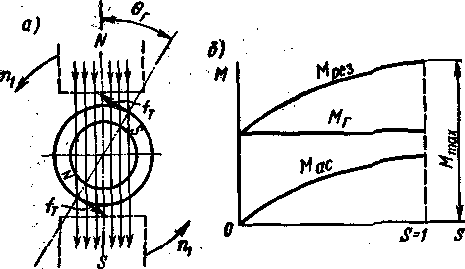
Ротор гистерезисного двигателя намагничивается под действием магнитного поля статора. При синхронной частоте вращения ротор неподвижен относительно вращающегося магнитного поля статора и ось магнитного поля ротора отстает от оси поля статора на угол θг , вследствие чего возникают тангенциальные составляющие fт сил взаимодействия между ротором и статором (рис. 7.13, а) и вращающий момент Мг . Таким образом, режим работы гистерезисного двигателя при синхронной частоте вращения не отличается от режима аналогичного синхронного двигателя с постоянными магнитами. Максимальное значение угла θг , определяется только свойствами материала ротора; этим же определяется и значение максимального момента Мг в синхронном режиме. Чем шире петля гистерезиса ферромагнитного материала ротора, тем больше угол θг и гистерезисный момент Мг . При асинхронном режиме ротор перемагничивается — при неизменном угле θг и неизменном гистерезисном моменте.
При пуске двигателя, когда частота вращения ротора не равна п1 , кроме гистерезисного момента Мг появляется также асинхронный момент Мас , возникающий в результате взаимодействия вращающегося магнитного поля с вихревыми токами индуцируемыми этим полем в роторе. Так как ротор имеет большое активное сопротивление, то зависимость Мас = f(s) близка к линейной, и асинхронный момент имеет максимальное значение при s = 1, т. е. так же, как и в асинхронном
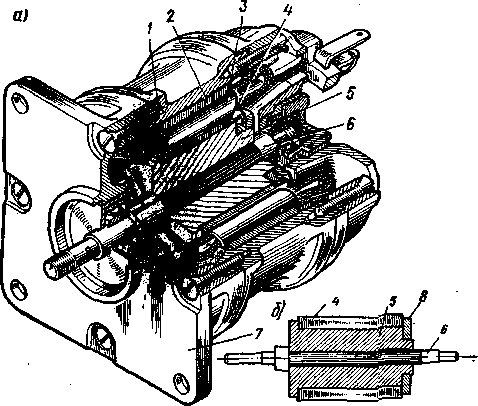 |
Рис. 7.12. Устройство гистерезисного двигателя: 1— корпус; 2 — пакет статора; 3 — обмотка статора; 4 — кольцо из магнитно-твердого материала; 5 — ротор; 6 — вал; 7 —фланец; 8— запорное кольцо |
Рис. 7.13. Схема возникновения гистерезисного момента |
 |
| Мрез = Мг + Мас . |
Согласно (4.20) электромагнитный момент М при асинхронном режиме пропорционален потерям в роторе ΔРэл2, поделенным на разность угловых скоростей (ω1 — ω2 ):
Мрез = ΔРэл2/(ω1 — ω2) = ΔРэл2/(ω1s)= ΔРг /(ω1s) + ΔРвихр /(ω1s),
Следовательно.
| Mг = sΔРг.н /(ω1s) = ΔРг.н /ω1 ; |
| Мас = s2ΔРвихр.н /(ω1s) = sΔРвихр.н /ω1 , |
Из (7.12) и (7.13) следует, что момент Мас зависит от скольжения, а момент Мг не зависит от скольжения (рис. 7.13,б); наибольшего значения вращающий момент Мрез достигает в начальный момент пуска, т. е. при s = 1.
Гистерезисные двигатели могут работать как в синхронном, так и в асинхронном режиме. Однако работа двигателя в асинхронном режиме неэкономична, так как при этом возникают значительные потери энергии в роторе:
ΔР = Рг + ΔРвихр = sΔРг.н + s2ΔРвихр.н .
Следовательно, при переходе гистерезисного двигателя в асинхронный режим его КПД резко уменьшается. Одной из разновидностей гистерезисного двигателя является двигатель с экранированными полюсами. Этот двигатель (рис. 7.14) имеет явнополюсный статор с однофазной катушечной обмоткой. На полюсах статора расположены экранирующие короткозамкнутые витки, охватывающие половину каждого полюса. Экранирующие витки создают сдвиг пo фазе между магнитными потоками, проходящими через экранированную и неэкранированную части полюсов, в результате чего в двигателе создается вращающееся магнитное поле (см. § 4.17).
Ротор состоит из нескольких кольцевых дисков с перемычками, выполненных из магнитно-твердого материала. Кольцевой ротор позволяет получить асинхронный и гистерезисный моменты. Диаметральная перемычка в роторе обеспечивает
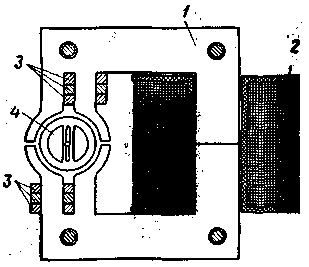 |
| Рис. 7.14. Устройство гистерезисного двигателя с экранированными
полюсами: 1 — статор; 2 — обмотка статора; 3 — экранирующие витки; 4 — ротор |
Ротор в рассматриваемом двигателе вращается в одну сторону — от экранированной части полюса к неэкранированной. Вал двигателя сочленен с редуктором, понижающим частоту вращения. Выпускаются также реверсивные двигатели, у которых каждая половина полюса охватывается катушкой (см. рис. 4.65, в). Замыкая ту или иную пару катушек, можно изменять направление вращения двигателя.
Преимущества и недостатки гистерезисных двигателей. Достоинствами гистерезисных двигателей являются простота конструкции, надежность в работе, малый пусковой ток Iп /Iном = 1,2 ÷ 1,5), плавность входа в синхронизм, бесшумность и сравнительно высокий КПД — до 60%. К недостаткам относятся повышенная стоимость из-за значительной стоимости магнитно-твердых сплавов и трудности их обработки, низкий cos φ (0,4—0,5) и склонность к качаниям при резких изменениях нагрузки. Гистерезисные двигатели выпускают на мощность до 2000 Вт и частоту 50, 400 и 500 Гц в трех- и двухфазном исполнениях.