
§ 5.5. БЫСТРОДЕЙСТВИЕ ИСПОЛНИТЕЛЬНЫХ ДВИГАТЕЛЕЙ И ИХ СРАВНЕНИЕ ПРИ РАЗЛИЧНЫХ СПОСОБАХ УПРАВЛЕНИЯ
Одним из основных требований, предъявляемых к исполнительному двигателю, является его быстродействие. Время разгона исполнительного двигателя определяется главным образом электромеханическими процессами, так как из-за значительного активного сопротивления ротора электромагнитные переходные процессы, происходящие в двигателях очень быстротечны. Обычно быстродействие двигателя характеризует его электромеханическая постоянная времени Тм , которая примерно на порядок выше электромагнитной постоянной времени Тэм = L/R,обусловленной индуктивностью двигателя. Значение Тм определяется из условий разгона ротора двигателя при статическом моменте на валу Мст = 0. При этом основное уравнение динамики
M = Мст + J dω/dt
M = J dω/dt,
Для идеализированного двигателя при линейной механической характеристике (см. рис. 5.8, а)
Следовательно, с учетом (5.30) уравнение (5.29) можно представить в виде
Мп (1 - ω/ω0 ) = J dω/dt
dω/(ω0 - ω) = Мп dt/(J ω0 ) = (1/Тм ) dt,
Решая (5.32), получаем уравнение
ω = ω0(1 - е-t/Тм ),
В двигателе с амплитудным управлением ω0 = v0 ω1 = 2αэ ω1 /(l + αэ2), где ω1 — синхронная угловая скорость, соответствующая круговому вращающемуся полю и пусковому моменту Мп = αэМк. Поэтому
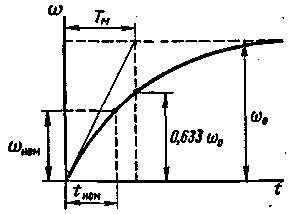 |
Рис. 5.16. Кривая разгона исполнительного двигателя |
Из формулы (5.35) следует, что при амплитудном управлении постоянная времени Тм увеличивается с уменьшением эффективного коэффициента сигнала αэ, так как снижается пусковой момент. При фазовом управлении ω0 = αэ ω1 и Мп = αэ Мк , поэтому
Следовательно, при фазовом управлении постоянная времени Тм не зависит от коэффициента сигнала αэ . Это объясняется тем, что при фазовом управлении механические характеристики параллельны — при уменьшении коэффициента сигнала прямо пропорционально снижаются момент при пуске и угловая скорость при холостом ходе. В результате время разгона не изменяется.
При амплитудном управлении уменьшение коэффициента сигнала αэ приводит к такому же уменьшению момента, но угловая скорость вращения при холостом ходе снижается в меньшей степени. Так, например, при αэ = 0,5 пусковой момент в два раза меньше, чем при αэ = 1, а угловая скорость при холостом ходе составляет 0,8 от ее значения при αэ = 1. Поэтому время разгона двигателя с уменьшением коэффициента сигнала возрастает.
При определении электромеханической постоянной времени реального двигателя следовало бы исходить из точного уравнения механической характеристики, которая является нелинейной. Однако такой расчет был бы весьма трудоемким, поэтому практически его ведут по (5.35) и (5.36) исходя из спрямленной характеристики. Из (5.35) и (5.36) следует, что постоянная времени Тм зависит от отношения J/Mк и угловой скорости ω1 = 2πf1 /p. Поэтому Тм возрастает с увеличением момента инерции ротора J и частоты f1 питающей сети и уменьшается при увеличении числа полюсов р. Двигатели, рассчитанные на работу при повышенной частоте тока, несмотря на то, что их обычно выполняют многополюсными, имеют большую постоянную времени, чем машины, рассчитанные на работу при частоте питающей сети 50 Гц.
В табл. 5.1 приведены ориентировочные значения постоянной времени Тм при круговом поле для исполнительных двигателей различной конструкции мощностью 15 — 30 Вт. Из таблицы следует, что наибольшим быстродействием обладает двигатель с полым немагнитным ротором. Постоянная времени Тм двигателя с ротором в виде беличьей клетки также невелика, несмотря на существенное увеличение момента инерции, так как этот двигатель имеет больший вращающий момент на единицу массы, чем двигатель с полым немагнитным ротором (особенно это относится к двигателю сквозной конструкции). В двигателе с полым стальным ротором постоянная времени Тм значительно увеличивается как из-за сравнительно большого момента инерции ротора, так и из-за малого вращающего моментa. При мощности от долей ватта до 10 Вт наибольшим быстродействием и лучшими энергетическими показателями обладает двигатель с ротором типа «беличья клетка».
Таблица 5.1
| Тип исполнительного двигателя | Постоянная времени Тм (с) при частоте питающей сети, Гц | |
| 50 | 400 | |
| С полым немагнитным ротором | 0,005-0,1 | 0,02-0,15 |
| С ротором типа беличьей клетки: | ||
| обычной конструкции | 0,2-1,0 | 0,3-1,5 |
| сквозной конструкции | - | 0,007-0,06 |
| С полым стальным ротором | 1,0-2,0 | 1,5-3,0 |
Иногда быстродействие исполнительного двигателя характеризуют временем разгона tном до номинальной угловой скорости ωном (см. рис. 5.16). Номинальным режимом исполнительного двигателя обычно считают режим, соответствующий максимальной механической мощности, которая для идеализированного двигателя наблюдается при ωном = 0,5ω0 . Поэтому положив в (5.34) ω = 0,5ω0 и t — tном , получим
tном = Тм 1n 2 = 0,693Тм .
Из анализа характеристик асинхронных исполнительных двигателей при различных способах управления можно сделать. следующие выводы:
а) линейность механических и регулировочных характеристик выше всего при фазовом управлении. Амплитудно-фазовое управление дает наибольшее отклонение от прямой линии;
б) мощность управления при амплитудном и амплитудно-фазовом управлении практически одинакова и пропорциональна квадрату коэффициента сигнала. При фазовом управлении коэффициент сигнала практически не влияет на мощность управления, т. е. при малых коэффициентах сигнала мощность управления больше, чем при других методах управления;
в) степень использования (электромагнитная мощность при круговом поле и неподвижном роторе) для всех трех способов управления одинакова, если одинаково напряжение возбуждения;
г) амплитудно-фазовое управление (конденсаторная схема) осуществляется наиболее просто, так как оно не требует специальных устройств для сдвига фаз между напряжениями управления и возбуждения. Это обстоятельство объясняет широкое применение этого вида управления в системах автоматики.