
§ 8.11. ПУСК ДВИГАТЕЛЕЙ
Способы пуска. Для двигателей постоянного тока могут быть применены три способа пуска:
1) прямой, при котором обмотка якоря подключается непосредственно к сети;
2) реостатный, при котором в цепь якоря включается пусковой реостат для ограничения тока;
3) путем плавного повышения питающего напряжения, которое подается на обмотку якоря.
Прямой пуск. Обычно в двигателях постоянного тока падение напряжения Iном ΣRа во внутреннем сопротивлении цепи якоря составляет 5 — 10% от Uном , поэтому при прямом пуске ток якоря Iп = Uном /ΣRа = (10 ÷ 20)Iном , что создает опасность поломки вала машины и вызывает сильное искрение под щетками. Поэтому прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых сопротивление ΣRа относительно велико, и лишь в отдельных случаях для двигателей с последовательным возбуждением мощностью в несколько киловатт. При прямом пуске таких двигателей Iп = (4 ÷ 6)Iном .
Переходный процесс изменения частоты вращения n и тока якоря ia в процессе пуска определяется нагрузкой двигателя и его электромеханической постоянной времени Тм . Для установления характера изменения п и ia при пуске двигателей с параллельным возбуждением исходим из таких уравнений:
U = се Фn + ia ΣRа + La dia /dt;
М = см Фia = Jdω/dt + Mн = J(2π/60) dn/dt + Mн ,
Из (8.95) определяем ток якоря
ia = [2πJ/(60смФ)] dn/dt + Мн /(смФ).
Подставляя его значение в (8.94), получаем
U = сеФn + [2πJΣRа/(60смФ)] dn/dt + Мн ΣRа /(смФ) + [La2πJ/(60смФ)] d2n/dt2
TaTм d2n/dt2+ Tм dn/dt + n = п0 - Δпн = пн ,
Δnн = МнΣRа/(смсеФ2) = IнΣRа /(сеФ) - уменьшение частоты вращения при переходе от холостого хода к нагрузке; nн = n0 - Δnн — установившаяся частота вращения; Tм = 2πJΣRа /(60 см сеФ2) — электромеханическая постоянная времени; Та = La /ΣRа — электромагнитная постоянная времени; значения Tм и Та определяют скорость протекания переходного процесса. Аналогичное уравнение можно получить для изменения тока якоря ia . Для этого достаточно проинтегрировать уравнение (8.96), подставить найденное значение и в (8.97), а затем для исключения интеграла
∫ idt продифференцировать полученное выражение. В результате будем иметь
TaTм d2ia /dt2 + Tм d2ia /dt + ia = Iн ,
Решая дифференциальные уравнения (8.98) и (8.99) при начальных условиях — при
t = 0 n(0) = 0 и ia (0) = Iн, получаем
| n = nн[1 + | Ta | (p2ep1 t - p1ep2 t ] |
| √1-4Ta /Tм |
ia = Iн + [(Iнач - Iн )/√1 - 4Ta /Tм ] (еp1 t - еp2 t),
р2 + р/Ta + 1/(Тм Та ) = 0;
p1,2 = [-1/(2Та )] (1 —+ √1 - 4Ta /Tм ).
Из (8.102) и (8.103) следует, что характер переходного процесса зависит от вида корней p1 и р2 характеристического уравнения. При действительных корнях (Tм > 4Ta) происходит апериодический процесс изменения ia и n. Сначала ток ia возрастает (рис. 8.64, а) согласно уравнению
ia = Iнач (1- е-t/Ta).
Затем по истечении времени tз якорь двигателя начинает вращаться, частота вращения n возрастает и возникающая в обмотке якоря ЭДС стремится уменьшить ток ia. Время запаздывания tз можно определить путем подстановки в (8.104) значения тока ia = Iн , соответствующего данному моменту нагрузки Mн :
tз = Та ln[Iнач /(Iнач - Iн )].
В действительности время tз несколько больше значения, полученного по формуле (8.105) из-за тормозящего действия вихревых токов, возникающих в массивных частях магнитопровода машины.
Максимальное значение тока якоря можно определить, продифференцировав выражение (8.101) и приравняв полученное выражение нулю.
При этом
Imax = [- U/(p2La )](p2 /p1 )p1/(p1 - p2).
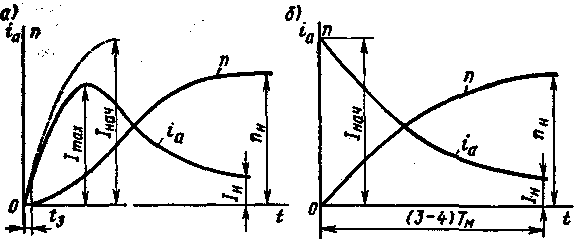 |
| Рис. 8.64. Графики изменения частоты вращения и тока якоря при прямом пуске двигателя с параллельным возбуждением |
Пунктиром на рис. 8.64, а показано, как возрастает ток ia, если якорь не сможет прийти во вращение. В большинстве случаев время протекания электромагнитных переходных процессов гораздо меньше чем механических; в этом случае можно принять Та = 0. При этом получим следующие уравнения, характеризующие изменение n и ia при пуске двигателя:
n = nн(1 - е-t/Tм);
ia = (Iнач- Iн )е-t/Tм + Iн.
На рис. 8.64,б приведены построенные по этим уравнениям зависимости n и ia. Время переходного процесса при пуске принимается равным (3 ÷ 4) Tм. За это время частота вращения n достигает (0,95 —0,98) от установившегося значения пн, а ток якоря Iа также приближается к установившемуся значению.
Реостатный пуск. Этот способ получил наибольшее применение. В начальный момент пуска при n = 0 ток Iп = U/(ΣRа + Rп ). Максимальное сопротивление пускового реостата Rп под-бирается так, чтобы для машин большой и средней мощности ток якоря при пуске
Iп = (1,4 ÷ 1,8) Iном , а для машин малой мощности Iп = (2 ÷ 2,5) Iном .
Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением. В начальный период пуск осуществляется по реостатной характеристике б (рис. 8.65,а), соответствующей максимальному значению сопротивления Rп пускового реостата; при этом двигатель развивает максимальный пусковой момент Мпmах . Регулировочный реостат Rр.в в этом случае выводится так, чтобы ток возбуждения Iв и поток Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения возрастает ЭДС Е и уменьшается ток якоря Iа = (U — E)/(ΣRa + Rп ). При достижении некоторого значения Мпmin часть сопротивления пускового реостата выводится, вследствие чего момент снова возрастает до Мпmах . При этом двигатель переходит на работу по реостатной характеристике 5 и разгоняется до значения Мпmin .
Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 6, 5, 4, 3 и 2 (см. жирные линии на рис. 8.65,а) до выхода на естественную характеристику 1. Средний вращающий момент при пуске Мп.ср = 0,5 (Мпmах + Мпmin ) = const, вследствие чего двигатель разгоняется с некоторым постоянным ускорением. Таким же способом пускается в ход двигатель с последовательным возбуждением (рис. 8.65,б). Количество ступеней пускового реостата зависит от жесткости естественной характеристики и требований, предъявляемых к плавности пуска (допустимой разности Мпmах - Мпmin ). Пусковые реостаты рассчитывают на кратковременную работу под током.
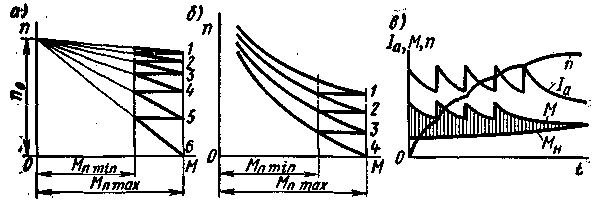 |
| Рис. 8.65. Графики изменения частоты вращения, момента и тока якоря при реостатном пуске двигателя с параллельным и последовательным возбуждением |
При выводе отдельных ступеней пускового реостата ток якоря Iа достигает некоторого максимального значения (рис. 8.65,в), а затем уменьшается до минимального значения. В соответствии с изменением тока якоря изменяется и электромагнитный момент М. Заштрихованная на рис. 8.65,в область соответствует значениям динамического момента Мдин = М - Мн, обеспечивающего разгон двигателя до установившейся частоты вращения.
Пуск путем плавного повышения питающего напряжения. При реостатном пуске возникают довольно значительные погери энергии в пусковом реостате. Этот недостаток можно устранить, если пуск двигателя осуществить путем плавного повышения напряжения, подаваемого на его обмотку. Однако для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Такой источник используют также для регулирования частоты вращения двигателя (см. § 8.12).