
§ 8.13. РАБОТА ДВИГАТЕЛЕЙ В ТОРМОЗНЫХ РЕЖИМАХ
Виды электрического торможения. Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
Различают три вида электрического торможения двигателей постоянного тока: 1) рекуперативное торможение — генераторное торможение с отдачей электрической энергии в сеть; 2) динамическое или реостатное торможение — генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря; 3) электромагнитное торможение — торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном и, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным возбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения и выше п0 = U/ceФ. В этом случае ЭДС машины становится больше напряжения сети и ток согласно (8.80) изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением (рис. 8.71, а) механические характеристики генераторного режима являются
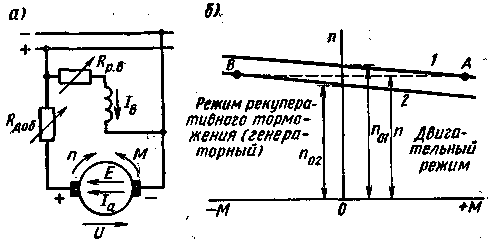 |
Рис. 8.71. Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах |
Двигатели с последовательным возбуждением не могут переходить в резким рекуперативного торможения. При необходимости рекуперативного торможения схему двигателей в тормозном режиме изменяют, превращая двигатели в генераторы с независимым возбуждением.
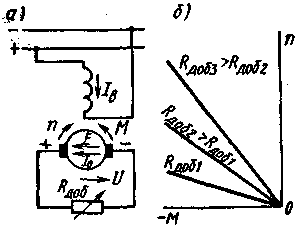 |
| Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения |
Двигатели со смешанным возбуждением могут автоматически переходить в генераторный режим, что обусловило их применение в троллейбусах, трамваях и других устройствах с частыми остановками, где двигатель должен обладать мягкой механической характеристикой.
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря
(рис. 8.72, б), или ЭДС Е (воздействуют на ток возбуждения). При n = 0 тормозной момент М равен нулю, следовательно, машина не может быть заторможена в неподвижном состоянии.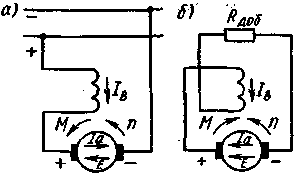 |
| Рис. 8.73. Схемы машины с последовательным возбуждением в режимах двигательном (в) и динамического торможения (б) |
Двигатель с последовательным возбуждением может работать в режиме динамического торможения при независимом возбуждении и при самовозбуждении. При независимом возбуждении обмотку возбуждения отключают от обмотки якоря и подключают к питающей сети последовательно с резистором, сопротивление которого выбирают так, чтобы ток возбуждения не превышал номинального значения. При этом механические характеристики двигателя линейные (см. рис. 8.72, б). При самовозбуждении при переводе машины в генераторный режим необходимо переключить провода, подводящие ток к обмотке возбуждения (рис. 8.73, а, б). Последнее необходимо для того, чтобы при изменении направления тока в якоре (при переходе с двигательного режима в генераторный) направление тока в обмотке возбуждения оставалось неизменным и создаваемая этой обмоткой МДС Fв совпадала по направлению с МДС Fост от остаточного магнетизма. В противном случае генераторы с самовозбуждением размагничиваются.
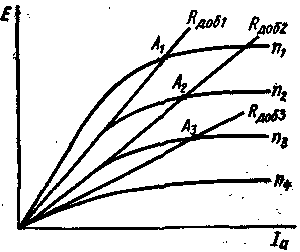 |
| Рис. 8.74. Зависимости ЭДС от тока якоря для двигателя с последовательным возбуждением в режиме динамического |
На рис. 8.74 показаны зависимости ЭДС Е от тока якоря Iа при различных частотах вращения (n1 > n2 > n3 > n4) и вольт-амперные характеристики Iа(ΣRa + Rдоб) = f(Ia) полного сопротивления, включенного в цепь якоря (Rдоб1 > Rдоб2 > Rдоб3).
Точки пересечения А1, А2 и А3 указанных зависимостей определяют значения тока якоря Ia = сеnФ/(ΣRa + Rдоб), при котором работает машина в режиме динамического торможения, а следовательно, и значение тормозного момента — М. При увеличении n и неизменном значении Rдоб возрастает ЭДС, ток якоря и тормозной момент.
Самовозбуждение оказывается возможным только при частоте вращения, большей некоторого критического значения nкр, при котором вольт-амперная характеристика сопротивления цепи якоря располагается по касательной к зависимости Е = f(Ia). Так, например, при подключении к машине реостата, с сопротивлением Rдоб1 тормозной режим при частоте вращения n1 может быть реализован (точка А1);
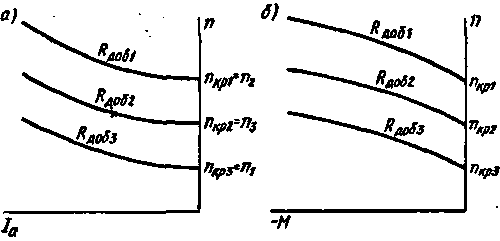 |
Рис. 8.75. Зависимость частоты вращения от тока двигателя в режиме динамического торможения якоря (а) и механические характеристики (б) |
при уменьшении же ее до значения n2 он невозможен. На рис. 8.75,а показаны зависимости частоты вращения от тока якоря, а на рис. 8.75,б
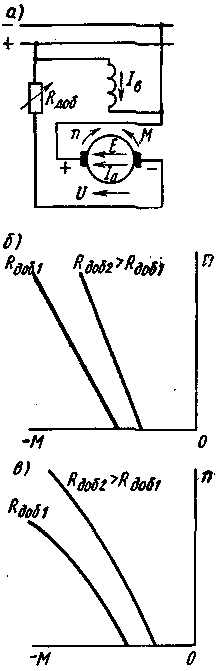 |
| Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения |
— механические характеристики двигателя при работе в режиме динамического торможения. В соответствии с рис. 8.74 при увеличении Rдоб динамическое торможение оказывается возможным при более высоких частотах вращения (nкр1 > nкр2 > nкр3). Двигатель со смешанным возбуждением также может работать в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя — путем переключения проводов, подводящих ток к обмотке якоря (рис. 8.76, а) или к обмотке возбуждения. Чтобы ограничить значение тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление Rдоб. Регулирование тока Ia = (U + Е)/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб или ЭДС Е (тока возбуждения Iв). Механические характеристики в этом режиме для двигателей с параллельным и последовательным возбуждением показаны на рис. 8.76, б и в.
С энергетической точки зрения электромагнитное торможение является наиболее невыгодным, поскольку машина потребляет как механическую, так и электрическую энергию, которые гасятся в обмотке якоря и во включенном в ее цепь реостате. Однако при этом способе можно получать большие тормозные моменты при низких частотах вращения и даже при n = 0, поскольку в этом случае ток Ia = U/(ΣRa + Rдоб).