
§ 5.13. ИНДИКАТОРНЫЙ РЕЖИМ РАБОТЫ ОДНОФАЗНЫХ СЕЛЬСИНОВ
Принцип действия. При индикаторном режиме на валу сельсина-приемника имеется незначительный момент сопротивления, поэтому для поворота ротора приемника вслед за поворотом ротора датчика требуется небольшой вращающий момент, который можно получить от приемника без дополнительных усилительных устройств.
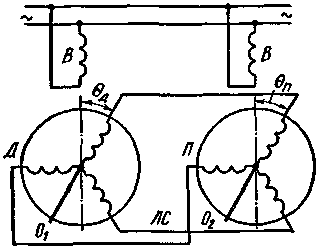 |
| Рис. 5.37. Схема включения сельсинов при работе их в индикаторном режиме |
ЭДС и токи в обмотках синхронизации. В трех фазах обмотки синхронизации датчика поток возбуждения Фв индуцирует ЭДС Е1д , Е2д и Е3д , значения которых определяются углом θд [см. (5.71)]. Так как обмотка возбуждения приемника присоединена к сети однофазного тока, то в фазах его обмотки синхронизации индуцируются ЭДС Е1п , Е2п , Е3п , которые определяются углом θп [зависимости их от θп аналогичны (5.71)]. ЭДС в одноименных фазах датчика и приемника направлены по контуру, образованному проводами линии связи, встречно, поэтому токи в фазах датчика и приемника соответственно равны:
|
} |
МДС ротора. При рассмотрении теории работы сельсинов в индикаторном режиме целесообразно токи в фазах обмоток синхронизации представить в виде двух составляющих:
I1 = I1д + I1п ; I2 = I2д + I2п ; I3 = I3д + I3п ,
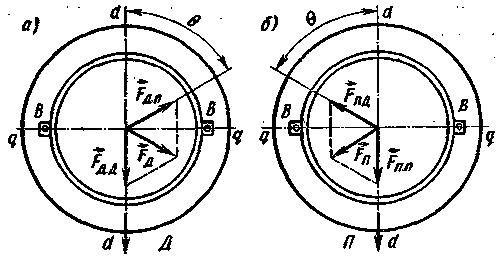 |
Рис. 5.38. Векторы МДС ротора в датчике F→д (а)и в приемнике F→п (б) |
|
} |
|
} |
При θ = 0 МДС в датчике и приемнике равны нулю, так как ЭДС в фазах обмоток синхронизации датчика и приемника взаимно компенсируются, и ток в этих фазах отсутствует. При наличии угла рассогласования появляются токи и МДС ротора, величины которых в датчике и приемнике одинаковы:
Fд = Fп = √Fd2 + Fq2 = l,5F2max √(1 - cos θ)2 + sin2θ =
= 1,5F2max√2 - 2cosθ = 3F2max sin(θ/2).
| Рис. 5.39. Векторы МДС ротора в датчике F→д (а)и в приемнике F→п (б)при повороте ротора датчика | 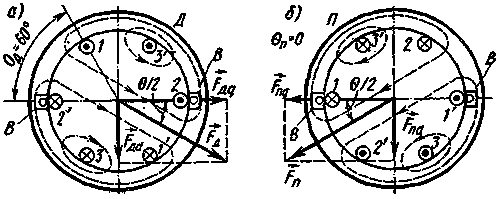 |
На рис. 5.39, а и б показаны пространственные векторы МДС датчика и приемника при θд = 60° и θп = 0. Вектор МДС ротора датчика F→д смещается относительно поперечной оси в сторону поворота датчика на угол θ/2 = 30°. В приемнике МДС вектор F→п смещается на такой же угол θ/2 = 30°, но в обратном направлении, и поперечная составляющая Fпq направлена противоположно поперечной составляющей МДС Fдq ротора датчика.
Синхронизирующий момент. Продольные составляющие МДС роторов датчика Fдd и приемника Fпd создают в обмотках возбуждения компенсационные токи (аналогично трансформатору), МДС которых компенсирует действие МДС Fдd и Fпd . Поперечные составляющие Fдq и Fпq , оставшиеся нескомпенсированными, взаимодействуют с потоком статора, создавая в датчике и приемнике синхронизирующие моменты, которые в датчике и приемнике направлены в различные стороны и стремятся повернуть оба ротора в согласованное положение.
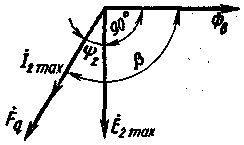
Векторная диаграмма для ротора сельсина-приемника (рис. 5.40) подобна векторной диаграмме для ротора асинхронного двигателя. Поперечная составляющая МДС ротора Fq совпадает по фазе с током ротора I2max и отстает от вектора потока возбуждения Фв на угол β = 90° + ψ2 . Величину и направление синхронизирующего момента можно определить так же, как в асинхронной машине нормального исполнения, считая, что момент создается активной составляющей тока ротора. Мгновенное значение синхронизирующего момента пропорционально произведению мгновенного значения потока возбуждения на мгновенное значение поперечной составляющей МДС Fq ротора:
mсн = C1Фвm sin ωtFq sin (ωt - β),
mсн = С2Фвm F2max sin θ [cos β - cos(2ωt - β)],
 |
| Рис. 5.40. Векторная диаграмма для ротора сельсина-приемника |
Мсн = C1Фвm Fq cos β = C2Фвm F2max sin θ sinψ2 .
Принимая sin ψ2 = const и обозначая С2Фвm F2max sin ψ2 = Mmax , получаем
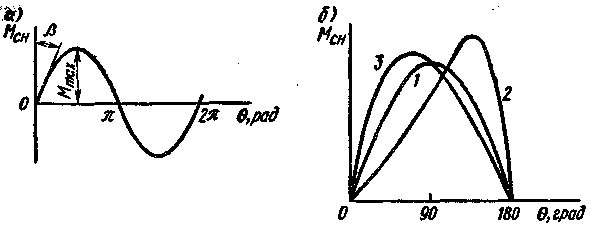 |
Рис. 5.41. Зависимости синхронизирующего момента от угла рассогласования |
Таким образом, среднее значение синхронизирующего момента пропорционально синусу угла рассогласования (рис. 5.41, а). Для того чтобы сельсины обладали свойствами самосинхронизации в пределах одного оборота, их обычно выполняют двухполюсными; при этом геометрический угол поворота ротора θ соответствует «электрическому» углу. Из рассмотрения рис. 5.41, а следует, что синхронизирующий момент равен нулю при углах рассогласования θ = 0 и θ = 180°, т. е. в рассматриваемой системе передачи угла при изменении угла рассогласования на 360° имеются две точки согласованного положения роторов датчика и приемника. Однако в действительности согласованное положение соответствует углу θ = 0, так как при θ = 180° наблюдается неустойчивое равновесие: при малейшем отклонении ротора в ту или иную сторону от этой точки возникает синхронизирующий момент, стремящийся ликвидировать угол рассогласования θ и сделать его равным нулю.
Как следует из (5.84), максимальный синхронизирующий момент Mmax зависит от произведения F2max sin ψ2 . Так как = 0,9E2max w2 ko62 /Z2 , a sin ψ2 = X2 /Z2 , то момент
Взяв производную момента Mmax по Х2 и приравняв ее нулю, можно определить, что при Х2 = R2 этот момент имеет наибольшую величину.
Синусоидальная зависимость синхронизирующего момента от угла рассогласования (рис. 5.41, а) наблюдается лишь в том случае, если индуктивные сопротивления обмоток ротора по продольной и поперечной осям равны: X2d = X2q , т. е. при наличии магнитной симметрии контура, по которому замыкается переменный поток ротора.
В сельсинах с неявновыраженными полюсами магнитная симметрия для переменного потока нарушается из-за того, что продольный поток сцеплен с обмоткой возбуждения, включенной в сеть с небольшим сопротивлением. Вследствие этого в сельсинах с неявновыраженными полюсами X2d < X2q , и кривая синхронизирующего момента несколько изменяется по сравнению с идеализированными условиями (рис. 5.41, б, кривая 1). Она имеет максимум при углах рассогласования, больших 90° (кривая 2). Чтобы увеличить синхронизирующий момент при малых углах рассогласования, сельсины, предназначенные для работы в индикаторном режиме, выполняют, как правило, с явно-выраженными полюсами, на которых располагают сосредоточенную обмотку возбуждения. В результате проводимость по продольной оси повышается, и максимум синхронизирующего момента достигается при угле, меньшем 90° (кривая 5), так как в этом случае X2d > X2q . Физически это объясняется тем, что в машине имеются дополнительные вращающие моменты, стремящиеся поставить ротор в положение, при котором его потокосцепления максимальны.
Важной характеристикой сельсина является удельный синхронизирующий момент (момент, приходящийся на 1° угла рассогласования):
Момент Мсн.уд пропорционален тангенсу угла наклона β характеристики Мсн = f(θ) в ее начальной части (см. рис. 5.41, а). Чем больше значения Мсн.уд , тем меньший угол рассогласования требуется для преодоления момента, возникающего от сил сопротивления, действующих на ротор, и, следовательно, тем меньше статическая погрешность сельсина. На рис. 5.42, а показаны кривые 1 и 2 изменения синхронизирующего момента для двух сельсинов-приемников, имеющих различные удельные синхронизирующие моменты. При одинаковом моменте сопротивления Мс погрешность θ1 сельсина с большим удельным синхронизирующим моментом Мсн.уд1 меньше погрешности θ2 сельсина с меньшим Мсн.уд2 .
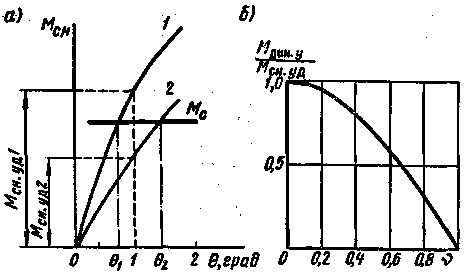 |
Рис. 5.42. Зависимости синхронизирующего момента |
При работе сельсинов в режиме непрерывного вращения кроме рассмотренных трансформаторных ЭДС в фазах обмоток роторов датчика и приемника возникают ЭДС вращения, которые по мере роста частоты вращения n снижают синхронизирующий момент. Удельный динамический синхронизирующий момент Мдин.уд в режиме вращения можно определить, используя метод симметричных составляющих. Однако в практических расчетах при частотах вращения, не превышающих 20 % от синхронной частоты n1 = 60f1 /p, часто используют эмпирическую формулу
Мдин.уд = Мсн.уд cos (πv/2),
На рис. 5.42, б показана зависимость отношения Мдин.уд /Мсн.уд от относительной частоты вращения v. Обычно при v = 0,1 ÷ 0,2 динамический синхронизирующий момент Мдин ≈ Мсн . Поэтому если требуется осуществить синхронное вращение при больших абсолютных значениях частоты вращения, то обмотку возбуждения целесообразно питать от источника переменного тока повышенной частоты (чтобы относительная частота вращения v была небольшой).
Точность. Погрешности при работе сельсинов в индикаторном и трансформаторном режимах вызываются электрической, магнитной и механической асимметрией датчика и приемника, обусловленной технологическими причинами, влиянием высших гармонических в кривой МДС ротора, влиянием сопротивления линии связи, изменением напряжения питающей сети и др. Кроме того, при работе сельсинов в трансформаторном режиме на точность отработки угла значительно влияет ток нагрузки в выходной обмотке, а при работе в индикаторном режиме — тормозной момент на валу приемника.
Технологические причины погрешностей можно устранить при изготовлении сельсинов, обеспечив высокую точность штамповки листов ротора и статора, а также сборки их пакетов; строгую концентричность цилиндрических поверхностей ротора и статора (равномерность воздушного зазора), тщательную балансировку ротора и пр.
Высшие гармонические в кривой МДС ротора можно уменьшить путем применения синусных (точных) обмоток, делая скос пазов и выбирая благоприятные соотношения между полюсной дугой и зубцовым делением.
При работе сельсинов в трансформаторном режиме весьма важно, чтобы при θ = 0 остаточное напряжение в выходной обмотке (нулевой сигнал) было мало. В современных сельсинах благодаря высокому качеству изготовления и использованию точных обмоток нулевой сигнал уменьшают до 0,2—0,3%.
В индикаторном режиме точность сельсина-приемника характеризуется погрешностью Δθ, которая определяется как полусумма максимального положительного Δθmax1 и отрицательного Δθmax2 отклонений ротора приемника от согласованного с ротором датчика положения за один оборот:
Δθ = 0,5(Δθmax1 + Δθmax2 ).
Погрешность Δθ определяется путем поворота ротора датчика на 360° сначала в направлении вращения часовой стрелки, а затем — в обратном направлении. В зависимости от класса точности сельсина-приемника погрешность не должна превышать 30—90 угловых минут.
Удельный синхронизирующий момент сельсинов-приемников, работающих в индикаторном режиме, для машин различных мощностей составляет (0,1—5)10-3 Н∙м/град; момент сопротивления контактных сельсинов — (0,3 ÷ 10)10-3 Н∙м; добротность, т. е. отношение удельного синхронизирующего момента к моменту сопротивления, — 0,3 —1,5; время успокоения, в течение которого останавливается ротор приемника после рассогласования на ±179°, —0,5—1,5 с. Точность сельсинов-датчиков определяют так же, как и при работе их в трансформаторном режиме.