
§ 5.8. СИНУСНО-КОСИНУСНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР
Выходные напряжения. На статоре этого трансформатора расположены обмотки В и К, а на роторе — обмотки S и С (см. рис. 5.24). При холостом ходе напряжения на синусной S и косинусной С обмотках ротора равны соответствующим ЭДС:
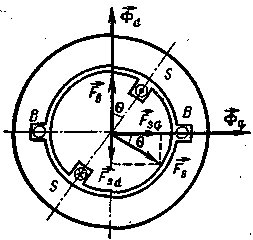 |
| Рис. 5.26. Векторная диаграмма МДС при подключении нагрузки к синусной обмотке |
Если к синусной обмотке S подключить некоторую нагрузку Zн S , то по обмотке пойдет ток
ÍS = ÉS /(ZS + ZнS ),
Ток IS создает МДС ротора FS . Как видно из рис. 5.26, ось этой МДС совпадает с осью фазы S , поэтому ее можно представить в виде суммы двух составляющих: продольной FSd = FS sin θ и поперечной FSq = FS cos θ. Продольная составляющая FSd создает в обмотке возбуждения В компенсирующий ток, МДС которого Fв , так же как и в двухобмоточном трансформаторе, компенсирует действие FSd .
Результирующий продольный поток Фd индуцирует ЭДС в обмотке S
ESd = kEв sinθ.
Поперечная составляющая FSq создает во вращающемся трансформаторе поперечный поток Фq . Относительно поперечного потока Фq обмотка S является косинусной и, следовательно, в ней индуцируется ЭДС
ESq = 4,44f1 w2 ko62 Фqm cos θ = CFS cos2 θ,
Таким образом, при нагрузке в синусной обмотке кроме требуемой ЭДС, пропорциональной синусу угла поворота θ, индуцируется ЭДС, пропорциональная току нагрузки и квадрату косинуса θ. Эта добавочная составляющая ЭДС вызывает появление погрешностей. Аналогично в косинусной обмотке при нагрузке поперечным потоком Фq индуцируется добавочная ЭДС ECq , пропорциональная току нагрузки и квадрату синуса θ, которая также вызывает появление погрешностей.
Для устранения погрешности вращающегося трансформатора, обусловленной поперечным потоком Фq , применяют так называемое симметрирование трансформатора, т. е. компенсацию поперечного потока ротора. Существует два способа симметрирования: вторичное (со стороны ротора) и первичное (со стороны статора).
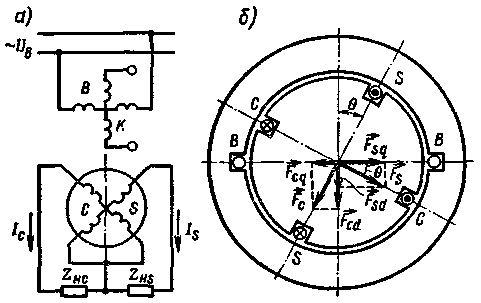 |
Рис. 5.27. Схема синусно-косинусного трансформатора со вторичным симметрированием и диаграмма МДС, создаваемых обмотками ротора |
Вторичное симметрирование. Для уменьшения погрешности выходного напряжения, снимаемого с синусной обмотки, подключают к косинусной обмотке сопротивление ZнС (рис. 5.27, а). В этом случае ток, проходящий по обмотке С, создает МДС FС , которую можно представить, так же как и МДС FS , в виде векторной суммы двух составляющих (рис. 5.27,б): продольной FСd = FС cos θ и поперечной FCq = FС sin θ. Продольная составляющая FCd совпадает по направлению с FSd , a поперечная составляющая FCq направлена против FSq . При FCq = FSq поперечный поток Фq = 0. Следовательно, не возникает и погрешность, обусловленная этим потоком. Сопротивление ZнС, при котором обеспечено полное симметрирование, можно определить из условия
FS cos θ = FC sin θ
| F́2d = F́S sin θ + F́C cos θ = |
|
sin θ + |
|
cos θ = |
|
Éв , |
В результате уменьшается погрешность поворотного трансформатора.
Рассмотренный метод симметрирования практически применим только при постоянном сопротивлении нагрузки, что является его недостатком.
Первичное симметрирование. Для уменьшения погрешности выходного напряжения снимаемого, например, с обмотки S (рис. 5.28, а), компенсационную обмотку К статора замыкают на какое-либо малое сопротивление ZK или накоротко. В этом случае по поперечной оси вращающегося трансформатора действует результирующая МДС
Fq = FSq + FK ,
Так как обмотка К относительно поперечного потока Фq представляет собой замкнутую накоротко вторичную обмотку трансформатора, то ее МДС F́K направлена против МДС F́Sq «первичной» обмотки, и результирующая МДС Fq , так же как и в трансформаторе тока, значительно
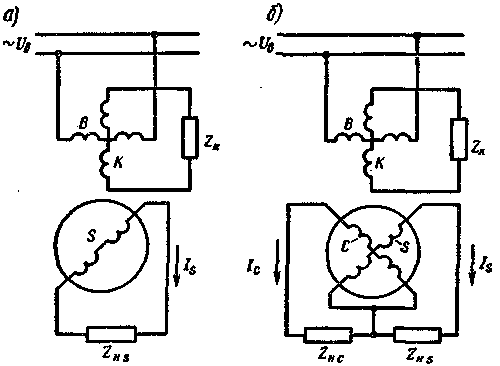 |
Рис, 5.28. Схемы синусно-косинусных вращающихся трансформаторов |