
§ 5.6. АСИНХРОННЫЙ ТАХОГЕНЕРАТОР
Назначение. Тахогенераторы применяют в автоматических устройствах для преобразования механического вращения в электрический сигнал. В идеальном случае тахогенератор должен давать на выходе напряжение, пропорциональное частоте вращения:
U = kп или U = kdθ/dt,
Тахогенераторы предназначены для следующих целей: измерения частоты вращения; выработки ускоряющих и за-медляющих сигналов; выполнения операции дифференцирования и интегрирования в схемах счетно-решающих устройств. Требования, предъявляемые к точности тахогенератора, различны в зависимости от условий работы. При измерении частоты вращения требуется сравнительно невысокая точность; обычно допустима погрешность 1 - 2,5 %. Наибольшую точность должны иметь тахогенераторы, работающие в качестве дифференцирующих и интегрирующих звеньев в вычислительных устройствах. При этом ошибка в линейности выходной характеристики не должна превышать 0,05 — 0,1 % по амплитуде и 0,1 % по фазе.
Принцип действия. Конструкция асинхронного тахогенератора аналогична конструкции асинхронного исполнительного
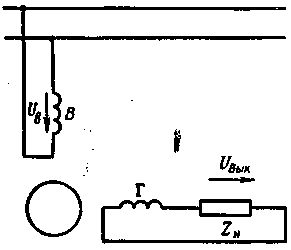 |
| Рис. 5.17. Схема асинхронного тахогенератора |
По обмотке В проходит переменный ток, в результате чего создается магнитный поток Фd , пульсирующий с частотой сети f1 . Этот поток распределен в пространстве практически синусоидально и его ось совпадает с осью обмотки возбуждения (рис. 5.18, а), называемой продольной осью d-d. Соответственно поток, создаваемый обмоткой возбуждения, называют продольным. Ось q-q, перпендикулярную оси обмотки возбуждения, называют поперечной. Рассмотрим, какие ЭДС и токи возникают при взаимодействии потока Фd с ротором и обмотками статора при неподвижном и вращающемся роторе.
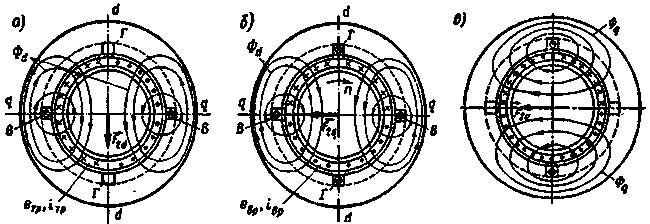 |
| Рис. 5.18. Характер распределения ЭДС и токов в роторе, индуцируемых в результате пульсации потока Фd и вращения ротора |
При неподвижном роторе магнитный поток Фd пронизывает обмотку возбуждения В, индуцируя в ней ЭДС
Ев = 4,44f1 wв ko6.в Фdm ,
Пренебрегая активным сопротивлением обмотки возбуждения и индуктивным сопротивлением, обусловленным потоком рассеяния, для обмотки возбуждения имеем уравнение Úв + Éв = 0.
В идеальном случае в обмотке Г продольный поток Фd не индуцирует ЭДС, так как обмотка Г сдвинута относительно обмотки В на 90°. Следовательно, равно нулю и напряжение на нагрузке. Однако практически точной магнитной симметрии осей указанных обмоток достигнуть невозможно; поэтому часть потока Фd оказывается трансформаторно связанной с обмоткой Г и индуцирует в ней некоторую ЭДС, называемую остаточной.
Полый ротор можно представить совокупностью ряда «элементарных проводников». В каждом таком проводнике пульсирующий поток индуцирует ЭДС етр , называемую трансформаторной. Так как активное сопротивление полого ротора во много раз больше индуктивного, то ЭДС етр и вызываемый ею в роторе ток iтp практически совпадают по фазе. При этом условии создаваемая током iтp МДС ротора F2d действует по продольной оси машины, как при неподвижном, так и при вращающемся роторе. На рис. 5.18, а показано направление ЭДС етр, тока iтp и МДС F2d в момент времени, когда поток Фd уменьшается. Поскольку для обмотки возбуждения справедливо условие Úв + Éв = 0, то при возникновении продольной МДС ротора F2d в обмотке возбуждения появляется компенсирующий ток (аналогично тому, как в трансформаторе), МДС Fвd которого компенсирует действие МДС F2d .
При вращении ротора каким-либо посторонним механизмом в его элементарных проводниках кроме трансформаторной ЭДС етр индуцируется еще и ЭДС вращения евр = Bx l2 v2 , где Вх — индукция в рассматриваемой точке воздушного зазора в данное мгновение; l2 — длина ротора в магнитном поле; v2 — окружная скорость ротора.
Поскольку поток Фd пульсирует во времени с частотой сети f1 , то и индуцируемые им ЭДС евр также пульсируют с этой же частотой. При синусоидальном распределении индукции Вх вдоль окружности ротора максимальное значение ЭДС евр в любой момент времени достигается в элементарном проводнике, расположенном по продольной оси машины.
На рис. 5.18,б показано мгновенное направление ЭДС вращения евр и создаваемого ею тока iвр в элементарных проводниках полого ротора. При любой частоте вращения направление этой ЭДС в элементах ротора, расположенных по обе стороны от поперечной оси, противоположное. Если пренебречь индуктивным сопротивлением полого ротора, то направление тока iвр в каждом элементе будет совпадать с направлением ЭДС евр . При этом условии токи ротора iвр создают МДС F2q и пульсирующий магнитный поток Фq , которые направлены по поперечной оси q-q(рис. 5.18, в). Поток Фq не сцеплен непосредственно с обмоткой возбуждения; в выходной обмотке он индуцирует ЭДС
Ег = 4,44f1 wг kоб.г Фqm ,
Очевидно, что частота ЭДС в выходной обмотке не зависит от частоты вращения ротора и при любых условиях равна частоте изменения ЭДС евр , в роторе, т. е. частоте сети f1 , питающей обмотку возбуждения. Неизменность частоты выходного напряжения является важным свойством асинхронного тахогенератора.
Рассмотрим, как связана величина ЭДС Ег в выходной обмотке с частотой вращения ротора. Согласно (5.40) она пропорциональна поперечному потоку Фqm = F2q /Rмq , где F2q — максимальное значение МДС ротора по поперечной оси; Rмq — магнитное сопротивление машины поперечной оси.
В асинхронной машине с полым немагнитным ротором эффективный воздушный зазор очень велик, а поэтому магнитное сопротивление Rмq является величиной практически неизменной (магнитное сопротивление стальных участков пренебрежимо мало). Следовательно, магнитный поток по поперечной оси практически пропорционален МДС F2q , которая, в свою очередь, пропорциональна току iвр и ЭДС вращения еер ротора. Однако ЭДС вращения прямо пропорциональна потоку Фd и частоте вращения ротора n, поэтому при отсутствии насыщения магнитной системы
Uвых ≈ Ег = с1 f1 Фqm = с2 f1 F2q = с3 f1 Фdmn = с4 n ,
Таким образом, в идеализированном тахогенераторе (при принятых допущениях) ЭДС в выходной обмотке прямо пропорциональна частоте вращения ротора. Иными словами, его выходная характеристика Uвых = f(v) является линейной (рис.5.19, а, кривая 2). В реальных условиях работы тахогенератора указанная характеристика отклоняется от линейной зависимости (кривая 1),т. е. появляется амплитудная погрешность ΔUвых.
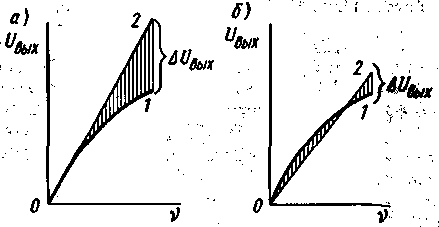 |
Рис. 5.19. Выходные характеристики некалиброванного (а)и калиброванного (б) асинхронного тахогенератора |
Причины погрешностей. Основным показателем качества работы тахогенератора является линейность выходной характеристики. Причинами, вызывающими погрешности тахогенератора, т. е. отклонение выходной характеристики от линейной зависимости, являются:
а) технологические неточности при изготовлении;
б) электромагнитная реакция ротора, изменяющая значения потоков Фd и Фq при изменении режима работы тахогенератора (частоты вращения и нагрузки).
в) изменение некоторых параметров при изменении частоты вращения (например, сопротивления полого ротора);
г) изменение сопротивления обмоток и магнитного сопротивления по различным осям под влиянием температуры, насыщения и др.
Из-за технологических неточностей при изготовлении тахогенераторов [отклонений обмоток статора В и Г от взаимно перпендикулярного положения, допусков в величине воздушного зазора и толщине полого ротора (рис. 5.18)] в выходной обмотке при частоте вращения ротора, равной нулю, индуцируется некоторая остаточная ЭДС Еост , называемая нулевым сигналом. Примерный характер ее изменения в зависимости от угла поворота ротора θ показан на рис. 5.20. Нулевой сигнал, обусловленный неточным взаимным расположением обмоток В и Г, можно уменьшить, если обмотку возбуждения расположить на внешнем статоре, а выходную обмотку — на внутреннем (рис. 5.21, а). Это дает возможность настроить тахогенератор на минимальный нулевой сигнал путем поворота внутреннего статора и установки его в такое положение, при котором остаточная ЭДС в выходной обмотке минимальна.
| Рис. 5.20. Зависимость нулевого сигнала от угла поворота ротора | 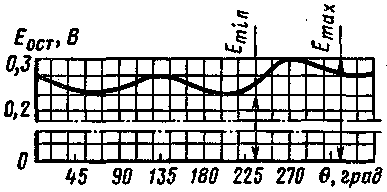 |
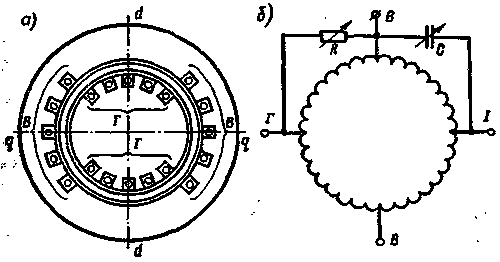 |
Рис. 5.21. Схемы для способов уменьшения нулевого сигнала |
Уравнение выходной характеристики. Это уравнение можно получить путем разложения пульсирующего поля обмотки возбуждения на вращающиеся поля прямой и обратной последовательностей с использованием методики, примененной для анализа двухфазного исполнительного двигателя. При этом уравнение выходной характеристики в комплексной форме приобретет вид
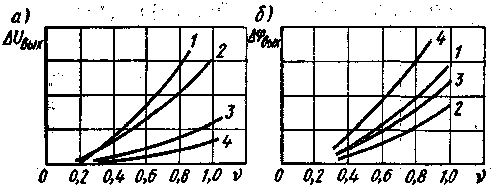 |
| Рис. 5.22. Зависимости амплитудной (а) и фазовой (б) погрешности от v: 1- при отсутствии нагрузки; 2 - индуктивная нагрузка; 3 - активная нагрузка; 4 - емкостная нагрузка (сопротивление Zн нагрузки имеет одну и ту же величину) |
В асинхронных тахогенераторах погрешность выходной характеристики является комплексной величиной, т. е. при изменении режима работы машины выходное напряжение изменяет-ся не только по величине, нo и по фазе. В связи с этим различают амплитудную ΔUвых и фазовую Δψвых погрешности тахогенератора (рис. 5.22).
Амплитудную и фазовую погрешности можно уменьшить путем соответствующей калибровки тахогенератора. Под калибровкой понимают установление такого наклона идеальной характеристики тахогенератора (см. рис. 5.19,б, кривая 2), при котором отклонение в среднем реальной характеристики 1 от идеальной было бы минимальным.