
§ 5.12. ТРАНСФОРМАТОРНЫЙ РЕЖИМ РАБОТЫ ОДНОФАЗНЫХ СЕЛЬСИНОВ
Принцип действия. Рассмотрим теорию однофазных сельсинов на примере контактных сельсинов с обмоткой возбуждения на статоре. Однако основные положения этой теории и полученные выводы в одинаковой мере можно распространить как на контактные сельсины с обмоткой возбуждения на роторе, так и на бесконтактные.
При работе сельсинов в трансформаторном режиме обмотка возбуждения В сельсина-датчика Д (рис. 5.35), механически связанного с ведущей осью О1 , подключена к сети однофазного тока, а обмотка возбуждения В сельсина-приемника П — к усилителю У, подающему питание на обмотку управления исполнительного двигателя ИД. Обмотки синхронизации обоих сельсинов соединены между собой линией связи ЛС.
Переменный ток, проходящий по обмотке возбуждения датчика, создает в нем пульсирующий магнитный поток, который индуцирует ЭДС в трех фазах обмотки синхронизации. Так как обмотки синхронизации датчика и приемника соединены между собой линией связи, то по ним проходит ток, вследствие чего в сельсине-приемнике создается пульсирующий магнитный поток. Если возникает рассогласование положений роторов датчика и приемника, то этот поток индуцирует в обмотке возбуждения некоторую ЭДС, и на ее зажимах появляется выходное напряжение. Это напряжение через усилитель подается на обмотку управления исполнительного двигателя, который поворачивает ведомую ось О2 совместно с ротором приемника. При ликвидации рассогласования выходное напряжение становится равным нулю, и вращение ведомой оси прекращается.
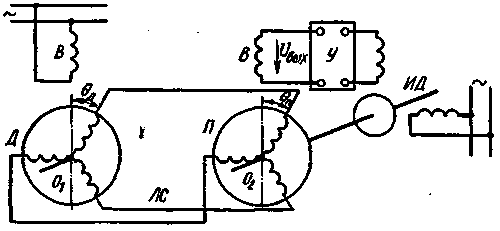 |
Рис. 5.35. Схема включения сельсинов при работе в трансформаторном режиме |
ЭДС и токи в обмотках синхронизации. Обмотка возбуждения датчика создает магнитный поток Фв , синусоидально распределенный по окружности статора и ротора и пульсирующий с частотой сети. Значение ЭДС, индуцируемой этим потоком в каждой фазе обмотки ротора датчика Д, зависит от ее положения относительно оси обмотки возбуждения (продольной оси d-d) (рис. 5.36). Если ось первой фазы ротора, расположенной в пазах ротора 1-1', совпадает с осью обмотки возбуждения, то действующее значение ЭДС, индуцируемой в этой фазе, максимальное:
E1д = E2 max = 4,44f1 w2 kоб2 Фвm ,
Е2д = E2 max cos l20°; Е3д = Е2 maх cos (-120°).
В общем случае, когда ось первой фазы ротора сдвинута относительно оси обмотки возбуждения на некоторый угол θд (рис. 5.36, а), получим
|
} |
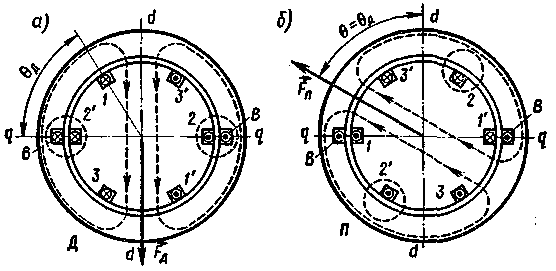 |
| Рис. 5.36. Векторы МДС ротора в датчике (а) и приемнике (б) при повороте ротора датчика на угол θ = 60° |
Так как одноименные фазы роторов датчика и приемника соединены последовательно, то проходящий по ним ток
|
} |
Из (5.72) следует, что алгебраическая сумма токов I1 + I2 + I3 = 0, вследствие чего линия связи может быть без нулевого провода.
МДС ротора в датчике и приемнике. Ток, проходящий по фазам обмотки ротора датчика, создает в нем соответствующие МДС. МДС отдельных фаз распределены в пространстве синусоидально, поэтому
|
} |
Определим результирующую МДС всех фаз датчика, для чего сложим составляющие МДС Fдd и Fдq по продольной оси d-d (оси обмотки возбуждения) и поперечной оси q-q. При этом
Fдd = F1д cos θд + F2д cos (θд + 120° ) + F3д cos (θд - 120° ) =
= F2 max [cos2 θд + cos2(θд + 120° ) + cos2(θд - 120° )] =
Fдq = F1д sin θд + F2д sin (θд + 120° ) + F3д sin (θд - 120° ) =
= F2 max [ cos θд sin θд + cos (θд + 120°) sin (θд + 120°) +
Таким образом, результирующую МДС ротора датчика можно представить пространственным вектором F→д, который при любом угле θд направлен по продольной оси и имеет постоянную величину, равную l,5F2 max (рис. 5.36, а).
МДС соответствующих фаз ротора приемника П (рис. 5.36,б) отличаются от МДС фаз ротора датчика только знаком, так как ток в фазах обмотки ротора приемника направлен противоположно току в фазах обмотки ротора датчика. Следовательно, результирующую МДС приемника также можно представить пространственным вектором F→п, величина которого не зависит от угла поворота роторов датчика и приемника и всегда равна - l,5F2 max . Ее продольная и поперечная составляющие
Fпд = -F1д cos θп - F2д cos(θп + 120° ) - F3д cos(θп - 120° ) = - 1,5F2 max cosθ;
Fпq = -F1д sin θп - F2д sin(θп + 120° ) - F3д sin(θп - 120° ) = - 1,5F2 max sinθ;
Знак « - » в (5.74) и (5.75) показывает на то, что вектор результирующей МДС F→д поворачивается в противоположную сторону относительно результирующей МДС F→д . Так, например, если установить ротор приемника в положение θп = 0 и повернуть ротор датчика на угол θд = 60° по часовой стрелке (рис. 5.36, а), то вектор МДС F→п повернется относительно ротора приемника на угол θ = θд - θп = 60°, но в противоположном направлении, т. е. против часовой стрелки (рис. 5.36,б).
Выходное напряжение сельсина-приемника. Продольная составляющая МДС ротора в датчике Fдd компенсируется МДС, создаваемой компенсационным током, который поступает из сети в обмотку возбуждения (аналогично трансформатору). В приемнике МДС ротора создает пульсирующий магнитный поток, продольная составляющая которого Фпd индуцирует в выходной обмотке (обмотке возбуждения) ЭДС
Евых = 4,44f1 w1 kоб1 Фп dm cos θ = E1 max cos θ,
Uвых ≈ Евых = E1 max cos (90° - θ) = E1 max sin θ.
При выборе сельсина для определенного режима работы необходимо знать удельное выходное напряжение, т. е. значение Uвых, приходящееся на 1° угла рассогласования:
Uуд = E1 max sin 1° = 0,0175 E1 max .
Это значение обычно приводится в паспорте сельсина. Для того чтобы зависимость выходного сигнала Uвых от угла рассогласования была по возможности близкой к синусоидальной, сельсины, предназначенные для работы в трансформаторном режиме, выполняют с неявно выраженными полюсами. Этим достигаются существенное уменьшение высших гармонических в кривой ЭДС и повышение точности при передаче угла.
Точность. Точность сельсинов-датчиков, а также сельсинов-приемников, предназначенных для работы в трансформаторном режиме, определяют по ошибке асимметрии — отклонению фактических положений ротора, в которых ЭДС фаз обмотки синхронизации равны нулю, от теоретических (отстоящих друг от друга на 180°). Ошибки находят для каждой из трех фаз. Погрешность подсчитывают как полусумму максимальных положительных и отрицательных отклонений; в зависимости от класса точности она не должна превышать 1 — 30 угловых минут. Для работы сельсина-приемника в трансформаторном режиме большое значение имеет удельное выходное напряжение (напряжение при угле рассогласования, равном 1°); значение его составляет 0,5—2 В/град.