
§ 7.2. СИНХРОННЫЕ МАШИНЫ С ПОСТОЯННЫМИ МАГНИТАМИ
Назначение. Машины с постоянными магнитами позволяют уменьшить потери в машине, а также (при полюсах, расположенных на роторе) устранить подвод тока через контактные кольца к обмотке возбуждения. В настоящее время синхронные машины с постоянными магнитами широко используют как микродвигатели, генераторы небольшой мощности и тахогенераторы. В этих машинах вместо обмотки возбуждения применяют блок постоянных магнитов, изготовляемый из магнитотвердого материала — кобальтовой стали, а также различных сплавов из алюминия, никеля, железа и кобальта, обладающих большой коэрцитивной силой. Постоянные магниты в таких машинах располагают в большинстве случаев на роторе. Статор имеет обычную конструкцию, в его пазах размещают одно-, двух- или трехфазную обмотку.
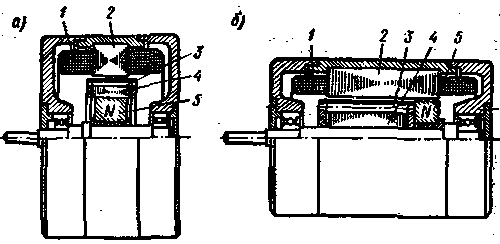 |
Рис. 7.1. Устройство син-хронного двигателя с постоянными
магнитами: |
Двигатели. В синхронных микродвигателях на роторе кроме блока постоянных магнитов устанавливают собранный из листовой стали пакет, в пазах которого размещают пусковую короткозамкнутую обмотку типа «беличья клетка». Последняя по окончании процесса пуска служит демпфером, препятствующим качаниям ротора. Наибольшее применение получили микродвигатели двух конструктивных исполнений: с радиальным (рис. 7.1, а) и аксиальным (рис. 7.1,б) расположением блока постоянных магнитов и стального пакета ротора с короткозамкнутой обмоткой. При радиальном расположении пакет ротора выполнен в виде кольца, напрессованного на блок постоянных магнитов, в котором имеются прорези, разделяющие полюсы разной полярности; размеры прорезей выбирают из условий оптимального использования энергии постоянных магнитов. При аксиальном расположении пакет ротора насаживают непосредственно на вал двигателя, а по его краям устанавливают один или два блока постоянных магнитов, выполненных в виде дисков. Пуск синхронных микродвигателей с постоянными магнитами обычно производят непосредственным включением в сеть. Разгон двигателя осуществляется за счет асинхронного вращающего момента Мас , возникающего в результате взаимодействия вращающегося магнитного поля с током в пусковой,
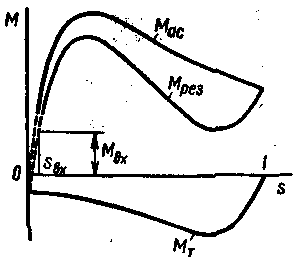 |
| Рис. 7.2. Зависимость M=f(s)для двигателя с постоянными магнитами |
Характерной особенностью рассматриваемого двигателя является то, что при пуске кроме асинхронного вращающего момента Мас возникает еще и тормозной момент Мт, образующийся из-за наличия на роторе постоянных магнитов. В процессе разгона двигателя поле постоянных магнитов пересекает обмотку статора и индуцирует в ней ЭДС Е1п , изменяющуюся с переменной частотой, пропорциональной частоте вращения ротора. Для ЭДС Е1п обмотка статора, присоединенная обычно к достаточно мощному источнику электрического тока, может считаться короткозамкнутой, вследствие чего в ней возникает переменный ток, который, взаимодействуя с магнитным потоком ротора, создает тормозящий момент Мт.
Физическая причина возникновения моментов Мас и Мт одинакова: в первом случае — это взаимодействие вращающегося магнитного потока статора с током пусковой обмотки ротора, во втором — это взаимодействие вращающегося потока ротора с током обмотки статора. Однако характер изменения этих моментов от скольжения ротора различный (рис. 7.2), так как ЭДС Е2, индуцируемая потоком статора в пусковой обмотке ротора в процессе его разгона, пропорциональна скольжению s, а ЭДС Е1п , индуцируемая потоком ротора в обмотке статора, пропорциональна п2, т. е. (1 — s). Поэтому, если максимум момента Мас , как и в асинхронном двигателе нормального исполнения, находится в области небольших скольжений s, то максимум момента Мт находится в области небольших значений (1 — s). Следовательно, зависимость результирующего пускового момента Мрез = Мас + Мт от скольжения s имеет провал в области малых частот вращения. Вход в синхронизм происходит при скольжении sвх , при котором пусковая обмотка развивает достаточно большой момент Мвх .
Электромагнитные процессы, происходящие в синхронных машинах с постоянными магнитами, в основном аналогичны электромагнитным процессам, происходящим в машинах с электромагнитным возбуждением. Однако на магнитный поток, создаваемый постоянными магнитами, сильное воздействие оказывает МДС якоря. Значительному размагничивающему действию со стороны якоря постоянные магниты подвергаются во время пуска синхронного двигателя, когда ток якоря наибольший.
В машинах с радиальным расположением блока постоянных магнитов при небольшой частоте вращения ротора (больших скольжениях) постоянные магниты достаточно хорошо экранируются пусковой короткозамкнутой обмоткой. Однако при небольших скольжениях защитное действие беличьей клетки мало, и значительная реакция якоря может вызвать необратимое размагничивание постоянных магнитов, при котором их свойства после отключения обмотки статора полностью не восстанавливаются. Максимальное размагничивающее действие возникает при асинхронном вращении, когда ротор периодически проходит положения, при которых МДС полюсов ротора и обмотки статора оказываются направленными встречно. В машинах с аксиальным расположением блока постоянных магнитов наибольшее размагничивание магнитов происходит в момент подключения двигателя к сети при неподвижном роторе.
Для снижения размагничивающего действия реакции якоря расстояние между полюсными наконечниками соседних полюсов в машинах с радиальным расположением постоянных магнитов обычно выполняют меньшим, чем в машинах с обмоткой возбуждения на роторе, а ширину полюсных наконечников — большей. В результате поток якоря Фaq в основном замыкается через полюсные наконечники, не подвергая размагничиванию постоянные магниты.
Двигатели с постоянными магнитами по сравнению с другими типами синхронных двигателей обладают хорошими энергетическими показателями (КПД и cos φ), повышенной устойчивостью работы в синхронном режиме и высокой стабильностью частоты вращения. Недостатком их является сравнительно большая стоимость, обусловленная дороговизной материала, из которого изготовляют постоянные магниты, и большая кратность пускового тока, что имеет значение при работе таких двигателей от полупроводниковых преобразователей.
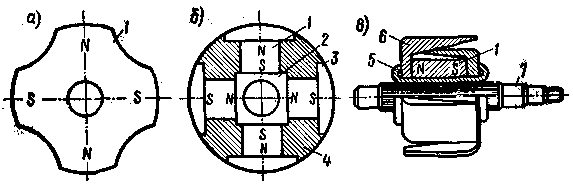 |
Рис. 7.3. Роторы генераторов с постоянными магнитами: 1 —блок постоянных магнитов; 2 — стальная втулка; 3 — полюсные наконечники; 4 — литой алюминий; 5 — немагнитная втулка; 6 — полюсы; 7 — вал |
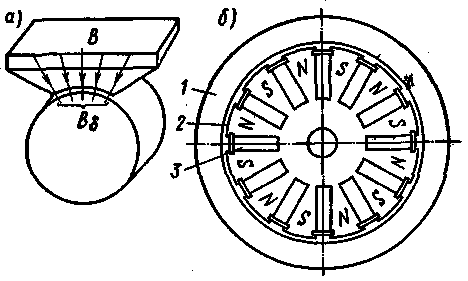 |
Рис. 7.4. Принцип устройства концентратора магнитного потока (а) и конструктивная схема генератора с постоянными магнитами (б): 1 — статор; 2 — ротор; 3 — постоянные магниты |
Генераторы. В синхронных генераторах малой мощности с возбуждением от постоянных магнитов ротор можно выполнить или в виде единого блока из магнитно-твердого материала (рис. 7.3, а),или с постоянными магнитами, установленными в стальной втулке (рис. 7.3,б). Промежутки между магнитами в некоторых случаях заливают алюминием, благодаря чему обеспечивается монолитность конструкции ротора. В генераторах, используемых в некоторых транспортных установках, иногда применяют ротор с когтеобразными полюсами (рис. 7,3, в).
При повышении мощности машины для увеличения индукции в воздушном зазоре и зубцах применяют различные концентраторы магнитного потока. Принцип устройства концентратора состоит в том, что площадь поперечного сечения магнита берется больше площади воздушного зазора (рис. 7.4, а). При этом индукция в воздушном зазоре
Bδ = BSм /Sδ ,
Выполняя машину с отношением Sм /Sδ ≈ 2 ÷ 3, получают Желаемую индукцию в воздушном зазоре.
Особенно выгодно применение машин с концентраторами магнитного потока при высоких частотах вращения и повышенной частоте тока. На рис. 7.4,б изображена конструктивная схема двенадцатиполюсного генератора мощностью 20 кВт на частоту 300 Гц при частоте вращения 3000 об/мин.
Недостатком таких генераторов является невозможность регулировать выходное напряжение. Однако изменение напряжения под нагрузкой не очень велико, так как отношение короткого замыкания весьма значительно: ОКЗ ≈ 3,5. В дальнейшем синхронные машины значительной мощности с постоянными магнитами могут найти широкое применение в комбинации с полупроводниковыми преобразователями не только как генераторы, но и как двигатели.
Тахогенераторы. Синхронный тахогенератор представляет собой одно- или трехфазную синхронную машину с постоян-ными магнитами на роторе. В такой машине при вращении ротора в обмотке якоря индуцируется ЭДС, действующее Значение которой
Е0 = 4,44f1 wa ko6a Фв = 4,44wa ko6a Фврn /60 = сп
| Úвых = É0 /(1 + Za /Zн ) = сп/(1 + Za /Zн ). |
Из (7.3) следует, что в синхронном тахогенераторе зависимость выходного напряжения Uвых от частоты вращения n является нелинейной, так как в значения сопротивлений Za и Zн входят индуктивные сопротивления обмотки якоря и нагрузки, зависящие от частоты f, т. е. от n. Поэтому синхронные тахогенераторы, несмотря на простоту конструкции и отсутствие скользящих контактов, не применяют в схемах автоматических устройств.
Практически синхронные тахогенераторы используют как датчики для измерения частоты вращения. В таких измерительных устройствах нагрузку подключают к выходной обмотке датчика непосредственно или через полупроводниковый выпрямитель. В некоторых случаях применяют устройства для измерения частоты вращения с трехфазным тахогенератором и специальным приемником, в котором создается магнитное поле, вращающееся с частотой, равной (или кратной) частоте вращения ротора тахогенератора.