
§ 6.11. МОЩНОСТЬ И ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ СИНХРОННОЙ МАШИНЫ
Активная мощность. Чтобы установить, как зависит активная мощность Р синхронной машины от угла нагрузки θ, рассмотрим упрощенные векторные диаграммы, построенные при
Ra = 0. Из диаграммы, приведенной на рис. 6.37, а для неявнополюсной машины, можно установить, что общая сторона треугольников ОАВ и АСВ АВ = ОA sin θ = AC cos φ или с учетом модулей соответствующих векторов
Е0 sin θ = Ia Xсн cos φ.
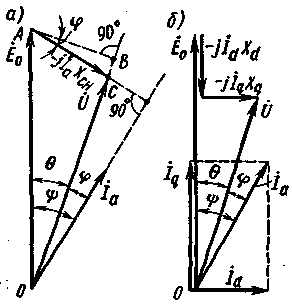 |
| Рис. 6.37. Упрощенные векторные диаграммы неявнополюсной и явнополюсной синхронной машины |
Следовательно, активная мощность синхронной машины
Р = mUIа cos φ = (mUЕ0/Xсн)sinθ.
Векторная диаграмма для явнополюсной машины приведена на рис. 6.37,б. Так как φ = ψ - 0, то активная мощность
P = mUIа cos(ψ - 0) =
= mU (Ia sin ψ sin θ + Iа cos ψ cos θ) =
= mU (Id sin θ + Iq cos θ).
Чтобы определить токи Id и Iq , спроектируем модули векторов ЭДС É0, напряжения Ú, падений напряжений - jÍd Xd и — jÍa Xq на оси — параллельную и перпендикулярную вектору É0 (рис. 6.37,б). Тогда Е0 = U cos θ + Id Xd ; U sin θ = Iq Xq , откуда
Id = (Е0 - Ucosθ)/Xd ; Iq = U sin θ/Xq .
Подставляя значение Id и Iq в (6.32), получаем
P = mU{[(Е0 - U cos θ)/Xd ] sin θ + (U sinθ /Xq ) cos θ},
| P = (mUE0/Xd ) sin θ + (mU2/2) (1/Xq - 1/Xd ) sin 2θ. |
Электромагнитный момент. В синхронных машинах большой и средней мощности потери мощности в обмотке якоря ΔРа эл = mIa2Ra малы по сравнению с электрической мощностью Р, отдаваемой (в генераторе) или потребляемой (в двигателе) обмоткой якоря. Следовательно, если пренебречь величиной ΔРа эл, то можно считать, что электромагнитная мощность машины Рэм = Р. Электромагнитный момент пропорционален мощности Рэм, поэтому для неявнополюсной и явнополюсной машин соответственно
| М = Рэм/ω1 = [mUE0/(ω1Xсн )] sin θ; |
| М = Рэм /ω1 = [mUE0 /(ω1 Xd )] sinθ + [mU2/(2ω1 )] (1/Xq - 1/Xd ) sin 2θ. |
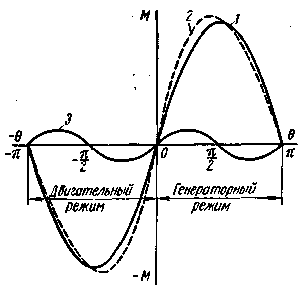 |
| Рис. 6.38. Угловые характеристики явнополюсной и неявнополюсной машин |
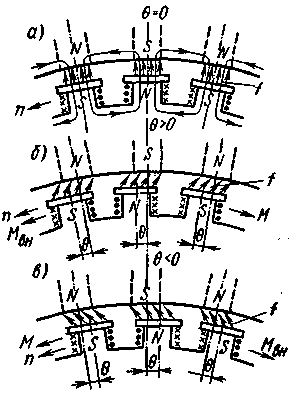 |
Рис. 6.39. Характер взаимодействия |
При неявнополюсной машине зависимость М = f(θ) представляет собой синусоиду, симметричную относительно осей координат (рис. 6.38, кривая 1). При явнополюсной машине из-за неодинаковой магнитной проводимости по различным осям (Хd ≠ Xq ) возникает реактивный момент
| Мр = [mU2 /(2ω1 )] (1/Хq - 1/Хd ) sin 2θ |
Он появляется в результате стремления ротора ориентироваться по оси результирующего поля, что несколько искажает синусоидальную зависимость М = f(θ) (кривая 2). Реактивный момент возникает даже при отсутствии тока возбуждения (когда Е0 = 0); он пропорционален sin 2θ (кривая 3). Так как электромагнитная мощность Рэм пропорциональна моменту, то приведенные на рис. 6.38 характеристики в другом масштабе представляют собой зависимости Рэм = f (θ) или при принятом предположении (ΔРа эл = 0) — зависимости Р = f (θ). Кривые М = f (θ) и Рэм = f (θ) называют угловыми характеристиками.
Физически полученная форма кривой М =f (θ) обусловлена тем, что потоки Фв и ΣФ сдвинуты между собой на тот же угол θ, на который сдвинуты векторы É0 и Ú (векторы Фв и ΣФ опережают É0 и Ú на 90°). Поэтому если угол θ = 0 (холостой ход), то между ротором и статором существуют только силы притяжения f, направленные радиально (рис. 6.39, а),и электромагнитный момент равен нулю.
При θ > 0 (генераторный режим) ось потока возбуждения Фв (полюсов ротора) под действием вращающего момента Мвн опережает ось суммарного потока ΣФ на угол θ (рис. 6.39, б), вследствие чего электромагнитные силы, возникающие между ротором и статором, образуют тангенциальные составляющие, которые создают электромагнитный тормозной момент М. Максимум момента соответствует значению θ = 90°, когда ось полюсов ротора расположена между осями «полюсов» суммарного потока ΣФ. При θ < 0 (двигательный режим) ось потока возбуждения под действием тормозного момента нагрузки Мвн отстает от оси суммарного потока (рис. 6.39, в), вследствие чего тангенциальные составляющие электромагнитных сил, возникающие между ротором и статором, создают электромагнитный вращающий момент М.