
§ 6.6. ВЕКТОРНЫЕ ДИАГРАММЫ ГЕНЕРАТОРА
Неявнополюсной генератор. При анализе работы синхронных генераторов и двигателей обычно используют векторные диаграммы: при качественном — упрощенные диаграммы, справедливые для машин, в которых отсутствует насыщение; при количественном — уточненные диаграммы.
Для цепи якоря неявнополюсного синхронного генератора можно составить уравнение
Ú = É - jÍa Xσa - ÍaRa = É0 + Éа - jÍaRσa - ÍaRa ,
Векторная диаграмма неявнополюсной машины (рис. 6.24, а), называемая диаграммой Потье, позволяет определить ЭДС холостого хода Е0 с учетом насыщения, если заданы напряжение, ток нагрузки (по величине и фазе), характеристика холостого хода и параметры машины. При ее построении по известным падениям напряжения определяют вектор ЭДС
Так как ЭДС Е индуцируется результирующим потоком Фрез , который создается результирующей МДС F́рез = F́в + kd F́a , то по характеристике холостого хода (рис. 6.24,б) по значению Fрез можно определить соответствующую ЭДС Е. Векторы F́рез и Ф́рез совпадают по фазе и оба эти вектора опережают вектор É на 90°. Зная Fрез и параметры машины, можно найти МДС возбуждения F́в = F́рез - kd F́a, а затем по характеристике холостого хода определить ЭДС холостого хода Е0. Вектор É0 отстает от вектора F́в на 90°. Если требуется перейти от режима холостого хода к режиму нагрузки, построения производят в обратном порядке.
Если машина не насыщена, то векторная диаграмма существенно упрощается, так как в этом случае можно складывать не МДС Fв и kd Fa , а соответствующие им потоки и ЭДС. Упрощенную векторную диаграмму синхронной неявнрполюсной машины (рис. 6.25, а) строят по уравнению (6.13).
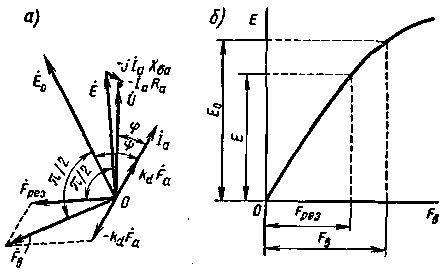 |
Рис. 6.24. Векторная диаграмма синхронной неявнополюсной машины и характеристика холостого хода |
Рис. 6.25. Упрощенные векторные диаграммы и схема замещения синхронной неявнополюсной машины |
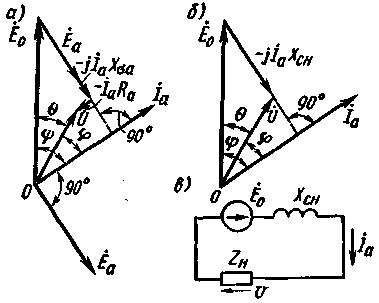 |
Поскольку падение напряжения в активном сопротивлении обмотки якоря Ia Ra сравнительно невелико, им можно пренебречь. Заменяя, кроме того, в уравнении (6.13) Éа = - jIa Xa , получаем
| Ú = É0 - jÍa Xa - jÍa Xσa = Е0 - jÍa Xсн . |
Величину Xсн = Ха + Хва называют полным или синхронным индуктивным сопротивлением машины. Упрощенная векторная диаграмма и схема замещения, соответствующие уравнению (6.15), изображены на рис. 6.25,б,в; их широко используют при качественном анализе работы синхронной машины. Необходимо, однако, отметить, что при определении Е0 по упрощенной диаграмме получается несколько большее значение, чем по точной диаграмме (см. рис. 6.24, а), в которой учитывается насыщение.
Угол θ между векторами Ú и É0 называют углом нагрузки. При работе синхронной машины в генераторном режиме напряжение U всегда отстает от ЭДС Е0, в этом случае угол θ считается положительным. Чем больше нагрузка генератора (отдаваемая им мощность), тем больше угол θ.
Явнополюсный генератор. Упрощенную диаграмму синхронной явнополюсной машины можно также построить по общему уравнению (6.12), которое с учетом (6.9) принимает вид
Ú = É + Éσa - Ía Ra = É0 + Éаd + Éаq + Éσa - Ía Ra .
На рис. 6.26,а приведена векторная диаграмма, соответствующая уравнению (6.16). Если пренебречь малой величиной Ra , то
ЭДС Eσa , индуцируемую в обмотке якоря потоком рассеяния, можно представить в виде суммы двух составляющих, ориентированных по осям d-d и q-q:
Éσa = Éσad + Éσaq ,
Éσad = - jÍd Xσa ; Éσaq = - jÍq Xσa ,
Eσad = Eσa sin ψ = Ia Xσa sin ψ = Id Xσa ;
Еσaq = Eσa cos ψ = Ia Xσa cos ψ = IqXσa .
С учетом (6.18) вместо (6.17) получим
Ú = É0 + Éаd + Éаq + Éσad + Éσaq = É0 + Éd + Éq ,
Éd = Éаd + Éσad ; Éq = Éаq + Éσaq .
Векторная диаграмма, построенная по (6.20), приведена на рис. 6.26,б.
Заменим ЭДС соответствующими индуктивными падениями напряжения:
Ú = É0 - jÍd Xad - jÍq Xaq - jÍd Xσa - jÍq Xσa ,
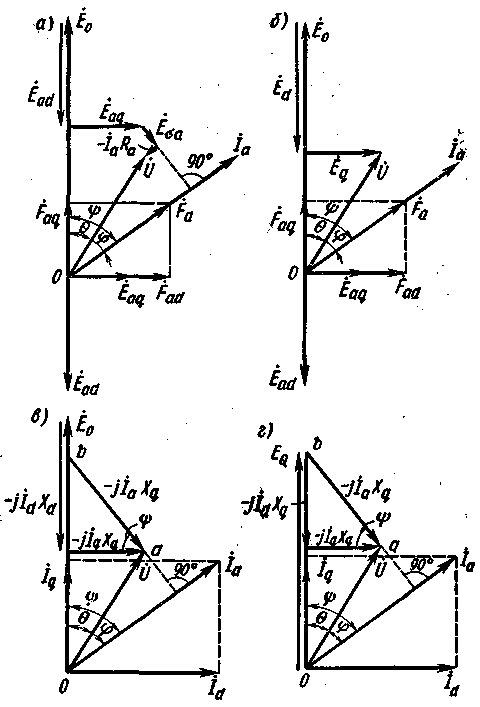 |
Рис. 6.26. Упрощенные векторные диаграммы синхронной явнополюсной машины |
Сопротивления Xd и Xq называют полными или синхронными индуктивными сопротивлениями обмотки якоря по продольной и поперечной осям.
На рис. 6.26, в приведена векторная диаграмма, построенная по (6.21). Если заданы векторы тока Ía и напряжения Ú, а угол ψ неизвестен, то его можно определить, проведя из конца вектора напряжения Ú отрезок аb, равный Ia Xq и перпендикулярный вектору тока Ía . При этом точка b будет расположена на линии, соответствующей направлению вектора É0 , так как проекция отрезка ab на вектор Éq равна модулю этого вектора:
ab cos ψ = Ia Xq cos ψ = Iq Xq = Eq .
В некоторых случаях при качественном анализе явнополюсную машину заменяют эквивалентной неявнополюсной, у которой синхронное индуктивное сопротивление по обеим осям равно сопротивлению Xq рассматриваемой явнополюсной машины. Возможность такой замены следует из векторной диаграммы (рис. 6.26, в). Такая эквивалентная машина имеет вместо ЭДС Е0 эквивалентную ЭДС EQ (рис. 6.26, г), причем угол нагрузки θ остается одним и тем же.