
§ 5.15. МАГНЕСИНЫ
Магнесины — миниатюрные бесконтактные сельсины, применяемые в системах передачи угла при весьма малых моментах сопротивления на валу приемника (индикаторный режим) и малом расстоянии между датчиком и приемником. Статор магнесина выполняют из листового пермаллоя в виде тороида (рис. 5.45), на котором намотана спиральная обмотка, подключенная к сети переменного тока. Эта обмотка имеет два вывода — б и в, расположенных под углом 120° друг к другу и к точкам а, в которых подключены питающие провода. Линия связи (одним из ее каналов является питающая сеть) соединяет одноименные точки а, б и в обмоток статора датчика и приемника. Ротор магнесина представляет собой постоянный магнит цилиндрической формы, намагниченный по диаметру.
При питании обмотки статора переменным током, изменяющимся с частотой f1 , возникает переменный магнитный поток возбуждения Фв , замыкающийся по тороиду. Пермаллой, из которого изготовлен тороид, резко изменяет свою магнитную проницаемость при подмагничивании, так как он имеет
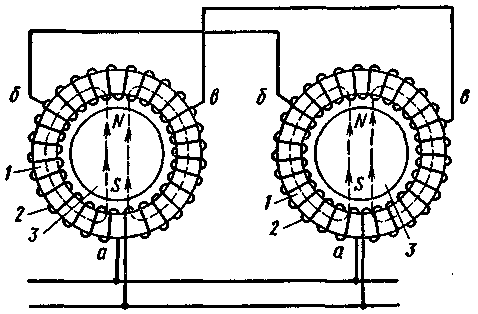 |
Рис. 5.45. Схема включения магнесинов: 1 — тороиды; 2 — обмотка статора; 3 — ротор |
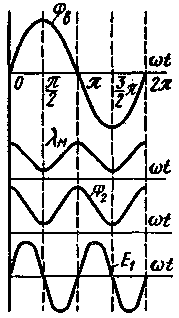 |
| Рис. 5.46. Графики изменения во времени потоков Фв и Ф2 магнитной проводимости λм тороида и ЭДС Е1 , в обмотке статора |
Если датчик и приемник находятся в согласованном положении, то по проводам линии связи ток не проходит, так как соединяемые этими проводами точки обмоток приемника и датчика являются эквипотенциальными относительно как основной ЭДС, имеющей частоту f1 , так и ЭДС двойной частоты. Однако при рассогласовании, когда роторы приемника и датчика занимают различные положения, ЭДС двойной частоты, индуцируемые на одноименных участках обмоток приемника и датчика, различны и по ним проходят токи частоты 2f1 . Эти токи, взаимодействуя с пульсирующим потоком Ф2 ротора, создают синхронизирующие моменты, стремящиеся повернуть роторы датчика и приемника в согласованное положение. Относительно ЭДС основной частоты точки а, б и в датчика и приемника остаются эквипотенциальными в любых положениях ротора, так как поток возбуждения Фв замыкается по тороиду, минуя ротор.
Магнесины, как и сельсины, обладают свойством самосинхронизации в пределах одного оборота, так как роторы их поляризованы. Удельный синхронизирующий момент у них мал, но из-за незначительных массы и инерции ротора магнесины позволяют на небольших расстояниях передавать угол со сравнительно малой погрешностью (1—2,5°).
* На рис. 5.46 показаны графики изменения потоков Фв и Ф2 , магнитной проводимости Λм и ЭДС E1 в предположении, что все они являются синусоидальными функциями времени. В действительности кривые Ф2 , Λм и E1 будут содержать значительные высшие гармонические, вызванные нелинейностью кривой намагничивания тороида.