
§ 5.3. ИСПОЛНИТЕЛЬНЫЙ ДВИГАТЕЛЬ С ФАЗОВЫМ УПРАВЛЕНИЕМ
Идеализированный двигатель. При фазовом управлении действующее значение напряжения управления остается постоянным по величине, но изменяется по фазе, поэтому векторы напряжений управления Úy и возбуждения Úв образуют угол β (см. рис. 5.1, в).
Рассмотрим работу двигателя с фазовым управлением при упрощающем предположении:
k = 1. При этом αэ = α = sin β. Так как в данном случае Úy = Úв = Ú, то из векторной диаграммы (рис. 5.11) имеем Úy.пр = 0,5 (Úy - jÚв) и модули напряжений прямой и обратной последовательностей
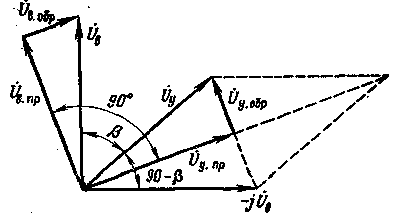 |
Рис. 5.11. Векторная диаграмма напряжений Uy и Uв |
Uy.пp = Uв.пр = Uпр = U cos [(90° - β)/2] = U √0,5 (1 + sinβ);
Uy.обр = Uв.обр = Uобр = U sin [(90° - β)/2] = U √0,5 (1 - sin β).
Если пренебречь всеми сопротивлениями, кроме активного сопротивления ротора (идеализированный двигатель (см. рис. 5.6), то выражения для токов прямой и обратной последовательностей принимают такой вид:
| Iпр = |
|
√0,5(1 + sinβ)(1 - v); Iобр = |
|
√0,5(1 - sinβ)(1 + v); |
При этом электромагнитная мощность двигателя
|
а электромагнитный момент
М = Pэм /ω1 = [2U2 /ω1 R'2)] (sin β - v).
Принимая за базовую величину момент при круговом вращающемся поле (sin β = 1) и неподвижном роторе Мк = 2U2/(ω1R'2), находим относительные значения момента и частоты вращения:
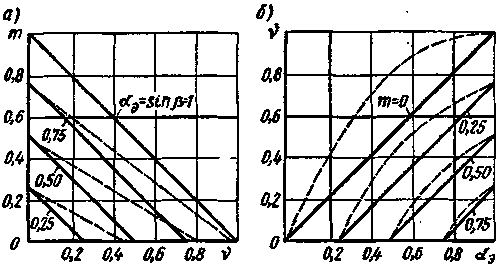 |
Рис. 5.12. Механические и регулировочные характеристики идеализированного двигателя при фазовом управлении |
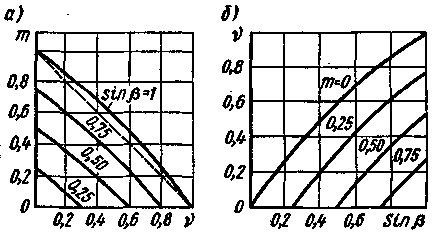
Рис. 5.13. Механические и регулировочные характеристики реального двигателя при фазовом управлении |
 |
Механические характеристики (рис. 5.12, а, сплошные линии) являются линейными и параллельными. Наклон их при малых коэффициентах сигнала больший, чем при амплитудном управлении (см. штриховые линии). Это объясняется тем, что приодном и том же коэффициенте сигнала αэ = sin β < 1 ток обратной последовательности в двигателе с фазовым управлением больше, чем в двигателе с амплитудным управлением, вследствие чего при фазовом управлении меньше и относительная частота вращения холостого хода.
Линейность характеристик является существенным преимуществом фазового управления. Особенно ярко оно проявляется при сравнении регулировочных характеристик, которые при фазовом управлении линейны (рис. 5.12,б, сплошные линии), а при амплитудном нелинейны (штриховые линии).
Реальный двигатель. Механические и регулировочные характеристики реального двигателя при фазовом управлении (рис. 5.13, а и б) отличны от характеристик идеализированного двигателя. Они нелинейны, и относительная частота вращения при холостом ходе и αэ = sin β < 1 больше, чем у идеализированного двигателя. Эти особенности характеристик реального двигателя обусловлены влиянием индуктивных сопротивлений ротора и статора. Однако нелинейность механических и регулировочных характеристик двигателя при фазовом управлении меньше, чем при амплитудном.
Несмотря на указанные преимущества, фазовое управление применяют сравнительно редко из-за большой мощности управления при малых коэффициентах сигнала. Действительно, при неподвижном роторе полная мощность обмотки управления Sy = Uy Iy = Uy2 /Zy = const, т. е. не зависит от коэффициента сигнала, так как амплитудное значение напряжения управления остается неизменным. Другим недостатком фазового управления является сравнительная сложность изменения фазы управляющего сигнала.