
§ 9.1. ТАХОГЕНЕРАТОРЫ
Принцип действия. Тахогенераторы постоянного тока выполняют с постоянными магнитами на статоре (рис. 9.1,а) или с электромагнитным возбуждением от независимого источника постоянного тока (рис. 9.1,б). В них используют якорь обычного типа с барабанной обмоткой, а также полый или дисковый с печатной обмоткой (см. § 9.2), При неизменном токе возбуждения Iв , т. е. при неизменном потоке Ф, ЭДС пропорциональна частоте вращения:
Е = сеФп,
U = Е - IaΣRa = Е - U(ΣRa /Rн),
Из (9.1) и (9.2) составим уравнение выходной характеристики тахогенератора:
|
На рис. 9.2, а сплошными линиями показаны выходные характеристики для различных сопротивлений нагрузки при идеализированных условиях (при Ф = const и ΣRa = const). Эти характеристики являются линейными, а их угол наклона к оси абсцисс уменьшается при снижении сопротивления нагрузки. Следовательно, тахогенераторы можно применять только при неизменной нагрузке, т. е. совместно с индикатором или другим устройством, на который рассчитан данный тахогенератор.
Крутизна выходной характеристики современных тахогенераторов постоянного тока S = 3 ÷ 100 мВ/(об/мин) (меньшие значения относятся к тахогенераторам с постоянными магнитами). Наиболее распространены тахогенераторы с номинальной частотой вращения n = 1500 ÷ 3000 об/мин.
Погрешности выходной характеристики. Выходная характеристика практически отклоняется от линейного закона в результате размагничивающего действия реакции якоря, наличия нелинейного сопротивления в переходном контакте между коллектором и щетками и изменения тока возбуждения из-за
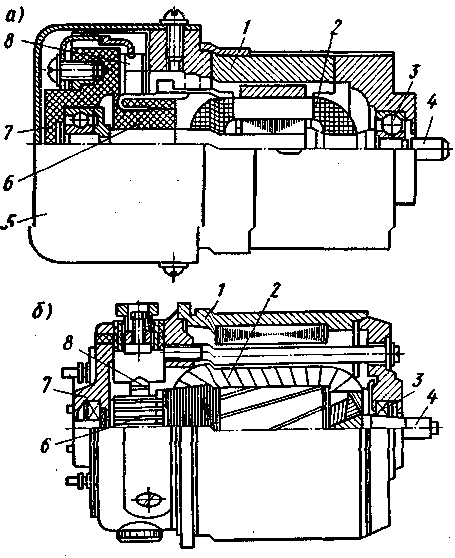 |
Рис. 9.1. Устройство тахогенераторов постоянного тока: 1 — корпус с полюсами; 2 — якорь; 3 — подшипник; 4 — вал; 5 — кожух; 6 — коллектор; 7 — подшипниковый щит; 8 — щетки |
| Рис. 92. Выходные характеристики тахогенератора постоянного тока и влияние на характеристики падения напряжения под щетками | 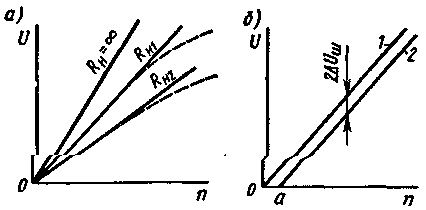 |
Размагничивающее действие реакции якоря проявляется при возрастании частоты вращения n, так как при этом повышается напряжение U, увеличивается ток Ia тахогенератора, а следовательно, и МДС якоря Fa. Поэтому при повышенных частотах вращения выходное напряжение U возрастает медленнее, чем увеличивается частота вращения (см. штриховые линии на рис. 9.2, а). Чтобы уменьшить влияние размагничивающего действия реакции якоря, в цепи нагрузки желательно иметь максимально большое сопротивление Rн и тахогенератор должен работать при небольших относительных частотах вращения.
Нелинейный характер сопротивления щеточного контакта также создает определенную погрешность по сравнению с идеализированной характеристикой 1 (рис. 9.2,б).
При этом выходная характеристика 2 остается линейной, однако в области малых частот вращения тахогенератор становится нечувствительным к изменению Δп — появляется зона нечувствительности Оа. Для уменьшения погрешности, создаваемой падением напряжения 2Δuщ под парой щеток, в тахогенераторах применяют металлографитовые щетки, у которых величина 2Δuщ незначительна, а в прецезионных тахогенераторах, предназначенных для счетно-решающих устройств, — щетки с серебряными и золотыми напайками. При использовании таких щеток погрешность от влияния величины 2Δuщ практически можно не учитывать.
Нагревание обмотки возбуждения тахогенератора приводит к увеличению ее сопротивления Rв , вследствие чего уменьшаются ток возбуждения, магнитный поток и выходное напряжение. Чтобы с повышением температуры обмотки возбуждения ток возбуждения изменялся незначительно, последовательно с ней включают либо терморезистор, который стабилизирует сопротивление цепи обмотки возбуждения, либо добавочный резистор с сопротивлением Rдо6 >> Rн , выполненный из материала с малым температурным коэффициентом сопротивления. Кроме того, чтобы уменьшить влияние тока возбуждения на магнитный поток, тахогенераторы часто выполняют с сильно насыщенной магнитной системой.
Указанные причины вызывают отклонение выходной характеристики тахогенератора от идеализированной линейной. Относительная скоростная амплитудная погрешность Δu, обусловленная нелинейностью выходной характеристики, обычно устанавливается при номинальной частоте вращения и определяется как отношение (%)
|
В зависимости от класса точности тахогенератора скоростная амплитудная погрешность при номинальной частоте вращения составляет ±(0,5 — 3)%, а ошибка асимметрии +(1 - 3)%.
Достоинства и недостатки тахогенераторов. Достоинствами тахогенераторов постоянного тока являются: малые габариты и масса при большой выходной мощности; отсутствие фазовой погрешности, что обусловлено работой на активную нагрузку; кроме того, в тахогенераторах с постоянными магнитами не требуется иметь вспомогательный источник электрической энергии для возбуждения. Однако по сравнению с тахогенераторами переменного тока они имеют ряд недостатков: сложность конструкции, высокую стоимость, нестабильность выходной характеристики из-за наличия скользящего контакта; пульсации выходного напряжения и радиопомехи, возникающие в результате коммутации тока щетками.