
§ 6.8. ОПРЕДЕЛЕНИЕ ИНДУКТИВНЫХ СОПРОТИВЛЕНИЙ СИНХРОННОЙ МАШИНЫ
Опыты холостого хода и короткого замыкания. Синхронные индуктивные сопротивления машины можно определить по результатам опытов холостого хода и короткого замыкания.
При опыте холостого хода определяют характеристику холостого хода Е0 — f(Iв) при номинальной частоте вращения машины, изменяя ток возбуждения Iв .
При опыте короткого замыкания фазы обмотки якоря замыкают накоротко через амперметры, после этого ротор приводят во вращение с номинальной частотой и снимают характеристику короткого замыкания, т. е. зависимость тока якоря от тока возбуждения Ia = f(Iв). Эта характеристика (рис. 6.30, а) имеет линейный характер, так как при Ra ≈ 0 сопротивление цепи якоря является чисто индуктивным и ток к. з. Iк = Id (рис. 6.30, б) создает поток реакции якоря, размагничивающий машину. В результате магнитная цепь машины оказывается ненасыщенной, т. е. ЭДС Е0 и ток Iк изменяются пропорционально току возбуждения Iв .
При работе в рассматриваемом режиме напряжение U = 0, поэтому уравнения (6.21) и (6.15) для явнополюсной и неявнополюсной машины принимают соответственно такой вид:
É0 = jÍк Xad + jÍк Xσa = jÍк Xd ;
É0 = jÍк Xa + jÍк Xσa = jÍк Хсн .
Определение индуктивных сопротивлений Xd и Xq . Из формулы (6.23) можно определить синхронное индуктивное сопротивление машины по продольной оси Xd = Е0/Iк , где ЭДС Е0 и ток Iк должны быть взяты при одном и том же значении тока возбуждения (рис. 6.30, а). Для прямолинейного участка характеристики холостого хода не имеет значения, при каком токе возбуждения определяется Xd , так как во всех случаях Xd = const. Это же значение сопротивления Xd получим при определении Е0 по спрямленной характеристике холостого хода Оа , соответствующей ненасыщенной машине.
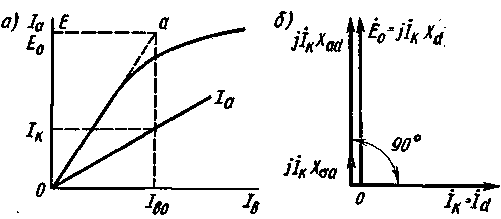 |
Рис. 6.30. Характеристики холостого хода и короткого замыкания (а) и векторная диаграмма явнополюсной машины при коротком замыкании (б) |
При учете насыщения сопротивление Xd уменьшается. Однако его значение различно для разных точек реальной характеристики холостого хода. Поэтому практически употребляется значение Xd для ненасыщенной машины, а учет насыщения, если это требуется, производится путем непосредственного определения соответствующих ЭДС по характеристике холостого хода (как это показано в § 6.6). Если известны коэффициенты приведения kd и kq , то по полученному значению Xd можно определить синхронное индуктивное сопротивление по поперечной оси Хq = (kq /kd ) Xd . В неявнополюсных машинах Xd = Xq = Хсн , т. е. Хсн = Е0/Iк . Если выразить синхронные индуктивные сопротивления в относительных единицах, то
Xd* = (Iаном /Uном )Xd ; Xq* = (Iаном /Uном )Xq ,
В современных синхронных явнополюсных машинах средней и большой мощности Xd* = 0,6 ÷ 1,6, а Xq* = 0,4 ÷ 1. Сопро-тивление Xd* определяется в основном реакцией якоря, так как относительная величина индуктивного сопротивления, обусловленного потоком рассеяния, мала (Xσa* = 0,1 ÷ 0,2). В неявнополюсных машинах средней и большой мощности обычно сопротивление Хсн* = 0,9 ÷ 2,4.
Сопротивления, выраженные в относительных единицах, характеризуют параметры машины, показывая относительную (относительно номинального напряжения) величину падения напряжения при номинальном токе. Кроме того, эти величины позволяют сравнивать свойства генераторов различной мощ-ности.
Отношение короткого замыкания. Иногда в паспорте машины указывают величину, обратную Xd* , называемую отношением короткого замыкания:
Это отношение характеризует значение установившегося тока к. з. Iк.ном = ОКЗIном , который возникает при номинальном токе возбуждения генератора (соответствующем номинальному напряжению). При указанных выше значениях Xd* и Xq* для неявнополюсных машин ОКЗ = 0,5 ÷ 1,0, а для явнополюсных 0,8 ÷ 1,8. Следовательно, установившийся ток короткого замыкания в синхронных машинах сравнительно невелик (в некоторых машинах он меньше номинального), так как при этом режиме ψк ≈ 0, и поле якоря сильно размагничивает машину. Очевидно, что при коротком замыкании результирующий магнитный поток Фрез.к << Фв и ЭДС Е << Е0.
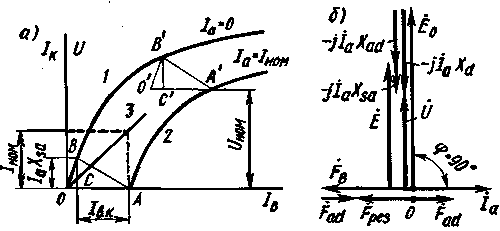 |
Рис. 6.31. Индукционная нагрузочная характеристика синхронного генератора (а) и его векторная диаграмма при индуктивной нагрузке (б) |
Величина ОКЗ имеет большое значение для эксплуатации: она показывает кратность тока к. з. и определяет значение мощности, которой можно нагрузить синхронный генератор. Следовательно, целесообразнее иметь машину с большим ОКЗ, однако это требует выполнения ее с большим воздушным зазором, что существенно удорожает машину.
Определение индуктивного сопротивления Хσа . Для определения Хσа снимают индукционную нагрузочную характеристику генератора, т. е. зависимость его напряжения U от тока возбуждения Iв при неизменных токе нагрузки Ia = Iном , частоте f1 и cos φ = 0 (чисто индуктивная нагрузка). Нагрузочная характеристика 2 (рис. 6.31, а) проходит ниже характеристики холостого хода 1, которую можно рассматривать как частный случай нагрузочной характеристики при Ia = 0. Так как при снятии индукционной нагрузочной характеристики в машине имеется только продольная составляющая МДС Fad реакции якоря, то, как следует из векторной диаграммы (рис. 6.31,б), результирующая МДС F́peз = F́в - F́ad и напряжение машины Ú = É0 - jÍa Xad - jÍa Xσа = E - jÍa Xσа . Точка А кривой 2 соответствует режиму короткого замыкания, т. е. значению U = 0 при Iк = Iном . Треугольник ABC называют реактивным или характеристическим треугольником; его горизонтальный катет СА соответствует току возбуждения Iв.к , компенсирующему размагничивающее действие реакции якоря Fad ном , а вертикальный катет ВС — ЭДС, необходимой для компенсации падения напряжения Ia ном Xσа при номинальном токе якоря. Для любой другой точки нагрузочной характеристики при φ = 90° составляющая тока возбуждения, компенсирующая размагничивающее действие реакции якоря, остается неизменной, так как значение тока якоря постоянно. Неизменным остается и падение напряжения Ia ном Xσа . Следовательно, нагрузочную характеристику можно получить как след вершины А реактивного треугольника при перемещении его так, чтобы вершина В скользила по характеристике холостого хода, а стороны треугольника оставались бы параллельными соответствующим сторонам первоначально построенного треугольника. В этом легко убедиться, рассматривая точку А' и треугольник А'В'С' (рис. 6.31) при номинальном напряжении Uном . В этом режиме ЭДС Е = Uном + Iaном Xσа , т. е. равна ординате точки В'; отрезок А'С' соответствует току Iв.к , компенсирующему размагничивающее действие реакции якоря. Отрезок О'С' = ОС соответствует составляющей тока возбуждения, необходимой для индуцирования ЭДС Еσа = Iaном Xσа.
Из рассмотренного выводим следующий способ определения индуктивного сопротивления Хσа. На кривой 2 находят точку А', соответствующую номинальному напряжению Uном , и откладывают влево от этой точки отрезок О'А' = ОА (его определяют по характеристике короткого замыкания на рис. 6.30, а для тока Iк = Iном ). Затем через точку О' проводят прямую, параллельную начальной части характеристики 1, до пересечения с этой характеристикой в точке В'. Опустив из точки В' перпендикуляр на линию О'А', получают отрезок В'С' = Iaном Xσа . Следовательно, Xσа =В'С'/Iaном .
Сопротивление, найденное описанным способом (его называют сопротивлением Потье), несколько превышает действительное сопротивление Xσа, обусловленное потоками рассеяния; обычно ХР≈ (1,05 ÷ 1,3) Xσа. Последнее объясняется тем, что в точках В' (при холостом ходе) и А' (при токе Iaном ) токи возбуждения различны, и, хотя ЭДС и потоки в воздушном зазоре одинаковы, при большем токе возбуждения наблюдается увеличение магнитного сопротивления из-за больших потоков рассеяния обмотки возбуждения, насыщающих полюсы и ярмо индуктора, т. е. реально А'С' > АС.