
§ 5.4. ИСПОЛНИТЕЛЬНЫЙ ДВИГАТЕЛЬ С АМПЛИТУДНО-ФАЗОВЫМ УПРАВЛЕНИЕМ(КОНДЕНСАТОРНАЯ СХЕМА)
При включении емкости в цепь обмотки возбуждения исполнительного двигателя (рис. 5.14, а) напряжение управления Úy имеет ту же фазу, что и напряжение сети Ú1, т.е. Úу = αÚ1 , а напряжение возбуждения сдвинуто по фазе относительно Ú1 на некоторый угол, который определяется падением напряжения на емкости ÚС = - jÍв XС . При этом
Úв = Ú1 - ÚС .
Так как при изменении напряжения управления или частоты вращения двигателя изменяется сила тока Íв , то по величине и фазе изменяется также и напряжение Úв
Если подобрать коэффициент сигнала α = αк и емкость С так, чтобы поле было круговым, то векторная диаграмма
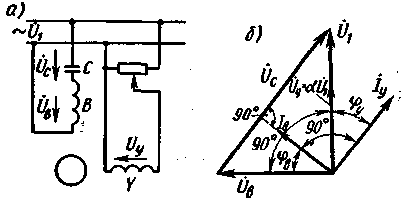 |
| Рис. 5.14. Схема исполнительного двигателя при амплитудно-фазовом управлении и его векторная диаграмма при круговом вращающемся поле |
В реальном исполнительном двигателе с амплитудно-фазовым управлением при изменении напряжения управления Úy ток возбуждения Íв и напряжение Úв изменяются незначительно из-за большого значения намагничивающего тока. Поэтому характеристики двигателя при данном способе управления сходны с характеристиками при амплитудном управлении. Некоторое увеличение нелинейности характеристик компенсируется простотой способа управления.
На рис. 5.15, а показаны механические характеристики реального двигателя при амплитудно-фазовом управлении. При α = αк относительная частота вращения v0 < 1. Это объясняется тем, что круговое вращающееся поле имеется только при v0 = 0. При вращении ротора сопротивление его изменяется, а следовательно, несколько изменяются ток Íв и напряжение Uв на обмотке возбуждения. Таким образом, даже при α = αк появляется обратное вращающееся поле, которое снижает частоту вращения холостого хода v0 по сравнению с частотой вращения идеализированного двигателя с амплитудным управлением. При холостом ходе и α < αк частота вращения по мере уменьшения αк становится сначала близкой, а затем даже большей соответствующих значений для идеализированного двигателя с амплитудным управлением. Это объясняется тем, что действие токов обратной последовательности в реальном двигателе уменьшается по сравнению с идеализированным из-за наличия индуктивного сопротивления обмотки ротора.
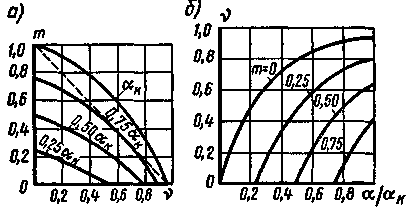 |
Рис. 5.15. Механические и регулировочные характеристики реального двигателя с амплитудно-фазовым управлением |
Вследствие увеличения амплитуды обратного поля с повышением частоты вращения нелинейность механических характеристик двигателя при амплитудно-фазовом управлении больше, чем при других методах управления.
Общий вид регулировочных характеристик двигателя остается примерно таким же, как и при амплитудном управлении (рис. 5.15,б), но линейность их несколько снижается. В двигателе с полым немагнитным ротором основной составляющей тока статора является ток холостого хода, поэтому ток статора с изменением режима работы изменяется мало. Мало изменяется и мощность возбуждения, увеличиваясь на 10—20% при переходе от режима короткого замыкания к холостому ходу. Мощность управления при амплитудно-фазовом управлении, как и при амплитудном управлении, пропорциональна квадрату коэффициента сигнала и сравнительно мало зависит от частоты вращения. Остальные характеристики (механическая мощность, КПД и др.) при амплитуднофазовом управлении мало отличаются от характеристик двигателя при амплитудном управлении (см. рис. 5.10).
Достоинствами амплитудно-фазового управления являются сравнительная простота схемы и возможность получения значительных пусковых моментов; недостатком можно считать некоторое снижение линейности характеристик.