
§ 2.8. СХЕМА ЗАМЕЩЕНИЯ ТРАНСФОРМАТОРА
Составление схемы замещения. Систему уравнений (2.23) — (2.25), описывающую электромагнитные процессы в трансформаторе, можно свести к одному уравнению, если учесть, что E1 = kE2, и положить
É1 = ÍoZm = Í0 (Rm + jXm). (2.29)
При этом параметры Rm и Хт следует выбрать так, чтобы в режиме холостого хода, когда ЭДС E1 практически равна номинальному напряжению U1, ток
Íо = É1/(Rm + jXm) = É1/Zm (2.30)
Решим систему уравнений (2.23)—(2.25) относительно первичного тока
| Í1 = |
|
= |
|
. (2.31) |
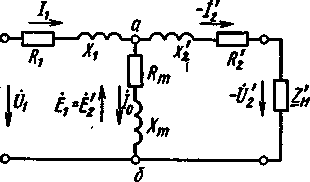
В соответствии с уравнением (2.31) трансформатор можно заменить электрической схемой, по которой можно определить токи Í1 и Í2, мощность Р1 забираемую из сети, мощность потерь ΔР и т. п. Такую электрическую схему называют схемой замещения трансформатора (рис. 2.28).
Эквивалентное сопротивление этой схемы
Zэкв = Z1 + [Zm (Z'n + Z'2)]/[Zm+ (Z'н+ Z'2)], (2.32)
 |
2.28. Схема замещения транс форматора |
Схема замещения трансформатора представляет собой сочетание двух схем замещения — первичной и вторичной обмоток, которые соединены между собой в точках а и б. В цепи первичной обмотки включены сопротивления R1 и Х1 , а в цепи вторичной обмотки — сопротивления R'2 в Х'2. Участок схемы замещения между точками а и б, по которому проходит ток I0, называют намагничивающим контуром. На вход схемы замещения подают напряжение Ú1, к выходу ее подключают переменное сопротивление нагрузки Z'н, к которому приложено напряжение — Ú'2.
Сопротивления Z'н (и его составляющие R'2 = R2k2 и Х'2 = Х2k2), а также Z'н, называют соответственно сопротивлениями вторичной обмотки и нагрузки, приведенными к первичной обмотке. Аналогично приведенными называют значения ЭДС и тока: Е'2 = kE2 = E1; I'2= I2/k.
Полная мощность приведенного контура вторичной обмотки в схеме замещения равна мощности вторичной обмотки реального трансформатора: I'2Е'2 = (I2/k)E2k = I2E2, а мощность электрических потерь в приведенном вторичном контуре этой схемы равна мощности потерь во вторичной обмотке реального трансформатора: I'22R'2 = (I2/k)2R2k2 = I22R2.
Относительные падения напряжений в активном и индуктивном сопротивлениях приведенного вторичного контура также остаются неизменными, как и в реальном трансформаторе:
I'2R'2/E'2 = (I2/k)k2R2/(kE2) = I2R2/E2;
I'2X'2/E'2=(I2/k)k2X2/(kE2) = I2X2/E2.
Физически переход от реального трансформатора к имитирующей его электрической схеме замещения можно наглядно представить состоящим из четырех этапов (рис. 2.29).
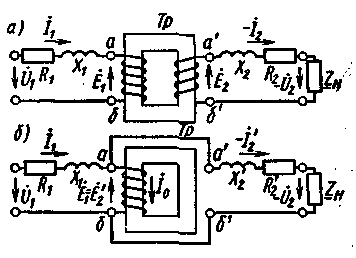 |
| Рис. 2.29. Эквивалентные схемы для приведения вторичной обмотки к первичной |
1-й этап. Реальный трансформатор заменяют идеализированным трансформатором Тр, в цепь первичной обмотки которого включают сопротивления R1 и Х1 а в цепь вторичной обмотки - R2 и Х2 (рис. 2.29,а).
2-й этап. Параметры вторичной обмотки приводят к параметрам первичной, в результате чего ЭДС обмоток оказываются равными: E1 = E'2.
3-й этап. Соединяют эквипотенциальные точки а и а'; б и б' (рис. 2.29,6).
4-й этап. Включают дополнительный намагничивающий контур, по которому проходит составляющая Í0 первичного тока.
На практике приводят как вторичную обмотку к первичной, так и первичную ко вторичной, в зависимости от того, какие процессы интересуют инженера. Отметим, что параметры схемы замещения можно считать постоянными только при небольших изменениях первичного напряжения, т. е. в пределах ±10%. Это в первую очередь относится к намагничивающему контуру с сопротивлением Zm = Rm+ jXm, параметры которого определяют ток Í0. С увеличением напряжения происходит насыщение стали магнитопровода, вследствие чего уменьшается величина Хт (намагничивающий ток резко возрастает).
Определение параметров схемы замещения. Параметры (Схемы замещения для любого трансформатора можно определить по данным опытов холостого хода и короткого замыкания (рис. 2.30).
Опыт холостого хода. К зажимам одной из обмоток посредством регулятора напряжения (РН) (рис. 2.30, а) подводят номинальное напряжение U0 = U1ном; к другой обмотке подключают вольтметр (ее можно считать разомкнутой). Измерив ток холостого хода 10 и мощность Р0, потребляемую трансформатором, согласно схеме замещения (рис. 2.31,a) находим
|
} | (2.33) |
Так как ток холостого хода мал по сравнению с номинальным током трансформатора, электрическими потерями ΔPэл1 = I02R1 пренебрегают и считают, что вся мощность, потребляемая трансформатором, расходуется на компенсацию магнитных потерь в стали магнитопровода. При этом
Р0 = I02(R1 + Rm) ≈ I02Rm (2.34)
откуда Rm = P0/I02.
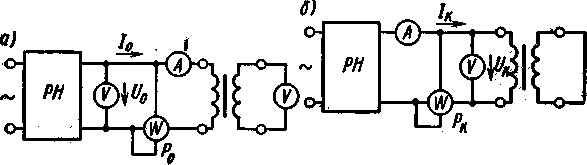 |
Рис. 2.30. Схемы проведения опытов холостого хода и короткого замыкания |
Аналогично считают, что X1 + Хт ≈ Хт, так как сопротивление Хт определяется основным потоком трансформатора Ф (потоком взаимоиндукции), а Х1 — потоком рассеяния Фσ1, который во много раз меньше Ф. Поэтому с большой степенью точности полагают, что
| Zm = U0/I0; Xm = √ | Zm2 - Rm2. | (2.35) |
Измерив напряжения U0 и U20 первичной и вторичной обмоток, определяют коэффициент трансформации
k = U0/U20. (2.36)
Векторная диаграмма трансформатора в режиме холостого хода, построенная исходя из указанных выше допущений, изображена на рис. 2.31,6. В действительности ток Í0 создает в первичной обмотке падения напряжения Í0R1 и jÍ 0X1 поэтому Ú0 = - É10 + Í0R1+ jÍ0X1.
Соответствующая векторная диаграмма показана на рис. 2.31, в.
Опыт короткого замыкания. Вторичную обмотку замыкают накоротко (сопротивление Zн = 0), а к первичной посредством регулятора напряжения РН подводят пониженное напряжение Uк (см. рис. 2.30,6) такого значения, при котором по обмоткам проходит номинальный ток Iном. В мощных силовых трансформаторах напряжение Uк при коротком замыкании обычно составляет 5 — 15% от номинального. В трансформаторах малой мощности напряжение Uк может достигать 25-50% от Uном.
Так как поток, замыкающийся по стальному магнитопроводу, зависит от напряжения, приложенного к первичной обмотке трансформатора, а магнитные потери в стали пропорциональны квадрату индукции, т.е. квадрату магнитного потока, то ввиду малости Uк пренебрегают магнитными потерями в стали и током холостого хода. При этом из общей схемы замещения трансформатора исключают сопротивления Rm и Хт и преобразуют ее в схему, показанную на рис. 2.32, а. Параметры этой схемы определяют из следующих соотношений:
|
} | (2.37) |
Разделить Zк на составляющие Z1 и Z'2 довольно трудно. Обычно принимают схему замещения симметричной, полагая Z1 = Z'2 = 0,5Zк. Это допущение близко к действительности и не вносит ощутимых погрешностей в расчеты. Векторная диаграмма трансформатора при коротком замыкании показана на рис. 2.32,6.
Треугольник ABC, образуемый векторами активного, реактивного и полного падений напряжения, называют треугольником короткого замыкания или характеристическим треугольником.
При изменении режима работы трансформатора (тока нагрузки) катеты характеристического треугольника изменяются пропорционально изменению тока. Это позволяет, как показано ниже, очень просто перестраивать векторные диаграммы для упрощенной схемы замещения трансформатора и производить количественные расчеты. Катеты ВС и АС называют соответственно реактивной и активной составляющими напряжения короткого замыкания.
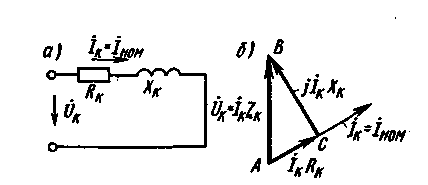 |
Рис. 2,32. Схема замещения трансформатора и его векторная диаграмма для режима короткого замыкания |
В ГОСТах и паспортах трансформаторов указывают относительное напряжение короткого замыкания при номинальном токе в процентах от номинального напряжения:
| uк = (IномZк/Uном)100. | (2.38) |
Аналогично можно выразить относительные значения его активной и реактивной составляющих (в %):
uк.а = (IномRк/Uном)100; uк.p = (IномXк/Uном)100. (2.39)
При этом
|
(2.40) |
При расчете параметров трансформатора по (2.37) не имеет значения, на какой из обмоток проводится опыт короткого замыкания. Обычно его удобнее проводить, замыкая накоротко обмотку с меньшим числом витков, но вообще следует исходить из удобства подбора приборов и обеспечения условий техники безопасности.
По известному значению ик можно определить установившийся ток короткого замыкания в реальных условиях эксплуатации (при номинальном напряжении):
Iк = Uном/Zк = Uном/[uкUном/(100Iном)] = 100Iном/uк. (2.41)
Обычно в силовых трансформаторах большой и средней мощности значение uк составляет 5—15%. Поэтому ток короткого замыкания в них в 7—20 раз превышает номинальный. Как правило, чем больше мощность и напряжение силового трансформатора, тем выше напряжение короткого замыкания ик (%).