
§ 4.19. ЛИНЕЙНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ
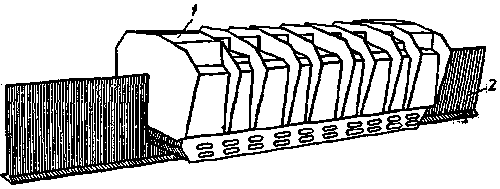
В линейном асинхронном двигателе (рис. 4.67) зубчатый статор 1 развернут в плоскость и в пазах его помещена трехфазная обмотка 2. Подвижная часть линейного двигателя может иметь конструкцию, подобную ротору обычной асинхронной машины, но также развернутому в плоскость. Она может иметь сердечник 4 из листовой электротехнической стали и обмотку 3 типа «беличья клетка», расположенную в пазах этого сердечника или быть выполненной в виде плоской покосы из ферромагнитного или немагнитного проводящего материала. Линейный асинхронный двигатель можно также выполнить в виде двух статоров, обращенных друг к другу, между которыми перемещается проводящее тело. Для высокоскоростного пассажирского транспорта применяют линейные двигатели, в которых статор 1 (рис. 4.68) размещен на движущемся экипаже, а проводящее тело в виде шины 2 установлено на железнодорожном пути.
Принцип действия линейного двигателя подобен принципу действия асинхронного двигателя нормального исполнения. Трехфазная обмотка статора создает бегущее магнитное поле, которое индуцирует в короткозамкнутой обмотке подвижной части (бегуна) ЭДС. В результате взаимодействия тока в обмотке бегуна и магнитного поля возникают электромагнитные силы, приводящие бегун в движение.
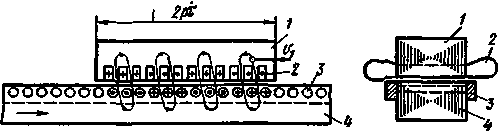 |
Рис. 4.67. Схема линейного асинхронного двигателя |
Рис. 4.68. Общий вид линейного асинхронного двигателя |
 |
Скольжение в линейном асинхронном двигателе s = (V1 — V2 )/V1 , где V1 = 2πf1 - линейная скорость бегущего поля; V2 - линейная скорость перемещения подвижной части; τ — полюсное деление. При номинальном режиме скольжение имеет примерно такие же значения, как и в асинхронных двигателях нормального исполнения, т. е. скорость V2 перемещения подвижной части близка к V1 .
В линейном асинхронном двигателе возникают краевые эффекты, обусловленные тем, что его статор не замкнут в кольцо и имеет конечную длину. В результате этого кроме основного магнитного бегущего поля возникает пульсирующее поле, которое можно представить в виде прямого и обратного бегущих полей. Обратное поле создает паразитные тормозные силы, вызывает неравномерное распределение тока в фазах обмотки статора, искажение распределения магнитного поля в воздушном зазоре, дополнительные потери мощности в статоре и подвижной части. Поэтому энергетические и тяговые показатели линейных двигателей хуже, чем у асинхронных двигателей нормального исполнения.
Особенно низкие энергетические показатели получаются при большом воздушном зазоре между статором и ротором. Например, в линейном двигателе, предназначенном для транспортных устройств, из-за большого зазора (около 50 мм) резко возрастает ток холостого хода, при этом КПД и коэффициент мощности составляют 0,2—0,3, а энергетический фактор А = η cos φ < 0,1.
В настоящее время линейные асинхронные двигатели используют для привода в движение экипажей высокоскоростного пассажирского транспорта на магнитном подвесе, тележек, подъемных кранов, заслонок и других линейно движущихся объектов. При использовании такого двигателя на высокоскоростном наземном транспорте (рис. 4.69, а) статор 2 с обмоткой 3 устанавливают на движущемся экипаже 1, а ротором служит стальная полоса 5, расположенная на железнодорожном пути 4 между рельсами. Возникающая продольная сила перемещает экипаж по рельсовому пути, а вызванная краевыми эффектами поперечная сила Fп способствует магнитному подвешиванию экипажа. При использовании двигателя в приводе тележки подъемного крана (рис. 4.69,б) статор 2 с обмоткой 3 устанавливают на тележке 6, а ротором служит стальная полоса 4, укрепленная на балке 5, по которой перемещается тележка.
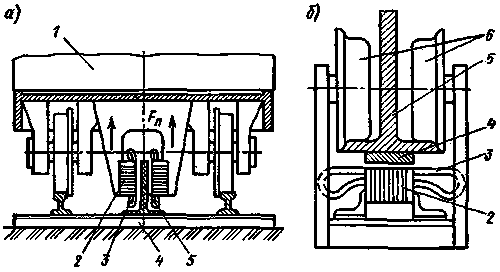 |
Рис. 4.69. Схемы установки линейных двигателей на движущемся экипаже и на тележке подъемного крана |
В некоторых случаях линейные двигатели применяют в металлообрабатывающих станках для получения возвратнопоступательного перемещения элементов станка путем периодического изменения чередования фаз обмотки статора двигателя. Однако при этом возникают довольно значительные потери мощности из-за того, что часть кинетической энергии подвижного элемента станка бесполезно теряется в каждом цикле ускорения и замедления. Кроме того, существенно увеличивается общая масса этого элемента за счет сочлененной с ней подвижной части линейного двигателя.