
§ 4.8. УСТОЙЧИВОСТЬ РАБОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ
Факторы, определяющие устойчивость. Под устойчивостью работы электродвигателя понимают способность двигателя восстанавливать установившуюся частоту вращения при кратковременных возмущениях (изменениях нагрузки, напряжения питающей сети и пр.).
Рассмотрим известное из механики условие равновесия моментов, приложенных к ротору двигателя:
При М = Mст ускорение ротора
Устойчивость зависит от конкретных условий, при которых работает электродвигатель, в частности от формы механических характеристик двигателя и приводимого им во вращение производственного механизма.
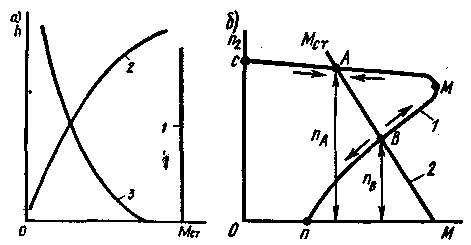 |
Рис. 4.23. Механические характеристики некоторых производственных механизмов (а) и графики для определения статической устойчивости асинхронного двигателя (б) |
На рис. 4.23, а для примера приведено несколько типичных механических характеристик различных производственных механизмов. Для грузоподъемных механизмов (кранов, лифтов, лебедок и т. п.) характерным является неизменность статического момента Мст, его практическое постоянство независимо от частоты вращения (прямая 1 на рис. 4.23, а). Вентиляторы, центробежные насосы, гребные винты и прочие механизмы имеют характеристику (кривая 2), при которой нагрузочный момент Мст резко увеличивается с ростом частоты вращения. Эту характеристику часто называют вентиляторной. Бетономешалки, шаровые мельницы и некоторые другие механизмы имеют большое трение в состоянии покоя и при малых частотах вращения, поэтому в таких механизмах с ростом частоты вращения нагрузочный момент падает (кривая 3).
Устойчивость «в малом». Рассмотрим работу асинхронного электродвигателя [механическая характеристика 1 на рис. 4.23, б], приводящего во вращение производственный механизм, у которого статический (нагрузочный) момент Мст падает с увеличением частоты вращения (механическая характеристика 2). В этом случае условие М = Мст выполняется в точках А и В при значениях частоты вращения пА и пB. Однако в точке В двигатель не может работать устойчиво, так как при малейшем изменении момента Мст (нагрузки) и возникающем в результате этого отклонении частоты вращения от установившегося значения появляется избыточный замедляющий или ускоряющий момент ± (М - Мст), увеличивающий это отклонение. Например, при случайном небольшом увеличении статического момента Мст ротор двигателя начинает замедляться, а его частота вращения п2 - уменьшаться. При работе машины в режиме, соответствующем точке В, т. е. на участке М - П характеристики 1, это приводит к уменьшению электромагнитного момента М, т. е. к еще большему возрастанию разности (М - Мст). В результате ротор продолжает замедляться до полной остановки. При случайном уменьшении статического момента ротор начинает ускоряться, что приводит к дальнейшему увеличению момента М и еще большему ускорению до тех пор, пока машина не переходит в режим работы, соответствующий точке А. При работе машины в режиме, соответствующем точке А, двигатель работает устойчиво, так как при случайном увеличении момента Мст и замедлении ротора (т. е. уменьшении частоты вращения п2 ) электромагнитный момент М возрастает. Когда момент М станет равным новому значению Мст, двигатель снова работает с установившейся, но несколько меньшей частотой вращения.
Таким образом, асинхронный двигатель при работе на участке С - М механической характеристики обладает свойством внутреннего саморегулирования, благодаря которому его вращающий момент автоматически регулируется по закону М = Мст. Это регулирование осуществляется за счет увеличения или уменьшения частоты вращения ротора п2 , т. е. система регулирования является статической.
Сравнивая условия работы двигателя в точках А и В, можно сделать вывод, что работа двигателя устойчива, если с увеличением частоты вращения п2 статический момент Мст уменьшается медленнее, чем электромагнитный момент двигателя М. Это условие представим в следующем виде:
dM/dn2 < dМст /dn2 .
Оно выполняется практически для всех механизмов с падающими характеристиками Мст = f(n) и с характеристиками, не зависящими от частоты вращения (кривые 3 и 1 на рис. 4.23, а), если двигатель работает на участке С - М характеристики 1 (рис. 4.23,6). Следовательно, двигатель, приводящий во вращение подобные механизмы, может устойчиво работать только в диапазоне изменения скольжения 0 < s < sкр . При s > sкр , т.е. на участке М - П механической характеристики 1, устойчивая работа становится невозможной.
При работе электродвигателя совместно с производственным механизмом, имеющим вентиляторную характеристику (см. рис. 4.23, а), устойчивая работа возможна и на участке М - П механической характеристики 1, т. е. при S > Sкp . Однако допускать работу при скольжениях, больших критического, не следует, так как при этом резко уменьшается КПД двигателя, а потери мощности в его обмотках становятся настолько большими, что могут в короткое время вывести двигатель из строя.
Устойчивость «в большом». Практически условие (4.54) является необходимым, но недостаточным. В эксплуатации возможны не только кратковременные небольшие изменения Мст, но и существенные увеличения нагрузочного момента при резких изменениях режима работы. Когда двигатель работает при скольжении, меньшем sкp , но близком к нему, случайная перегрузка двигателя может привести к его остановке при Мст > Mmax. Поэтому максимальный момент иногда называют опрокидывающим моментом.
При больших перегрузках устойчивость работы двигателя обеспечивают путем выбора номинального момента Мном < Mmax . Отношение kм = Mmax /Мном , называемое перегрузочной способностью, регламентируется ГОСТом. Перегрузочная способность для различных двигателей различна: kм = 1,7 ÷ 3,5. Большие значения имеют двигатели, предназначенные для работы с большими перегрузками, — крановые, металлургические и т. п.
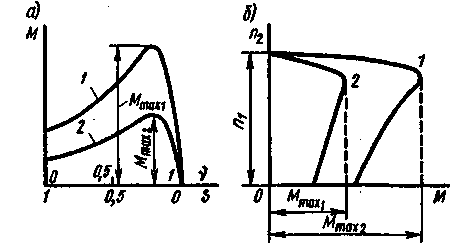 |
Рис. 4.24. Механические характеристики асинхронного двигателя при различных напряжениях |
Увеличение перегрузочной способности асинхронного двигателя ведет к возрастанию его габаритов и массы или к снижению энергетических показателей. Из формулы (4.48) видно, что значение максимального момента приблизительно обратно пропорционально индуктивным сопротивлениям Х1 + Х'2 обмоток. Для увеличения перегрузочной способности двигателя следует уменьшать эти сопротивления, т. е. числа витков обмоток статора и ротора. А это приводит к возрастанию магнитного потока (а следовательно, к увеличению сечения магнитопровода) и тока холостого хода. Поэтому двигатели с повышенным значением kм имеют большие габариты и массу, а ток холостого хода у них достигает 40 - 60% от номинального.
Большое значение для обеспечения устойчивой работы асинхронных двигателей имеет качество электроснабжения. Вращающий момент асинхронного двигателя зависит от квадрата питающего напряжения [см. (4.56) и (4.48)]. Поэтому даже незначительное уменьшение напряжения влияет на максимальный момент, а значительное уменьшение может вызвать остановку двигателя.
На рис. 4.24, а и б для примера приведены механические характеристики асинхронного двигателя при номинальном напряжении Ul = Uном (кривая 1) и напряжении Ul = 0,7Uном (кривая 2). Во втором случае электромагнитный момент уменьшается примерно в два раза, и работа двигателя при номинальной нагрузке становится невозможной. ГОСТом установлено, что длительное изменение напряжения в электрических сетях, питающих силовое оборудование, не должно отличаться от номинального более чем на - 5% и +10%.