
§ 4.12. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ И ИЗМЕНЕНИЕ НАПРАВЛЕНИЯ ВРАЩЕНИЯ
Частота вращения асинхронного двигателя определяется формулой
Частотное регулирование. Этот способ регулирования частоты вращения позволяет применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения, либо преобразователи частоты — электромашинные или статические, выполненные на управляемых полупроводниковых вентилях (тиристорах).
В настоящее время преобразователи частоты имеют довольно сложную схему и сравнительно высокую стоимость. Однако быстрое развитие силовой полупроводниковой техники позволяет надеяться на дальнейшее совершенствование преобразователей частоты, что открывает перспективы для широкого применения частотного регулирования. Подробное описание законов управления при частотном регулировании и анализ работы асинхронного двигателя при питании от преобразователя частоты даны в § 4.13 и 4.14.
Регулирование путем изменения числа полюсов. Такое регулирование позволяет получить ступенчатое изменение частоты вращения. На рис. 4.35 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в два раза. Для этого каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. Из рисунка видно, что при включении катушек 1-2 и 3-4 в две параллельные ветви число полюсов уменьшается в два раза, а следовательно, частота вращения магнитного поля увеличивается в два раза.
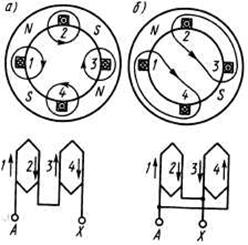 |
| Рис. 4.35. Схема переключения одной фазы обмотки статора для изменения числа полюсов: а – при 2р = 4; б – при 2р = 2 |
При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но, так как частота вращения возрастает в два раза, ЭДС, индуцированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными.
На рис. 4.36 показаны наиболее часто употребляемые схемы соединений обмотки статора с переключением числа полюсов в отношении 2:1. Схемы, приведенные на рис. 4.36, а и б, обеспечивают переключение при постоянном моменте, а схемы, приведенные на рис. 4.36, в и г, - при приблизительно постоянной мощности.
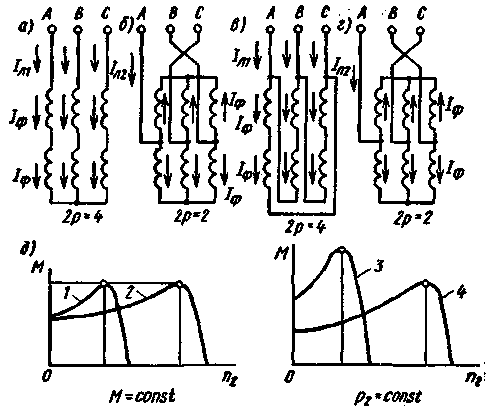 |
Рис. 4.36. Принципиальные схемы соединения обмотки статора с переключением числа полюсов в отношении 2:1 и механические характеристики двигателей при таком переключении |
Рассмотрим отношение потребляемых мощностей P1 и моментов М для рассматриваемых схем при упрощенном предположении, что линейное напряжение Uл , ток Iф в каждой полуобмотке фазы статора, КПД η и cos φ остаются неизменными. При этом для схем, изображенных на рис. 4.36, а и б, имеем
|
} |
Для схем, изображенных на рис. 4.36, в и г, имеем
|
} |
В уравнениях (4.63) и (4.64) индексы «1» обозначают меньшую частоту вращения, а индексы «2» — большую частоту вращения.
При использовании схем, приведенных на рис. 4.36, в и г, обычно для обеих частот вращения указывают одинаковую мощность, т. е. принимают, что Р12 = Р11 и М2 = 0,5М1 . Механические характеристики двигателя при переключении полюсов двумя рассмотренными методами приведены на рис. 4.36, д, кривые 1 и 2 — при постоянном моменте, кривые 3 и 4 — при постоянной мощности.
Как видно из схем, приведенных на рис. 4.36, при переходе от меньшей частоты вращения к большей изменяется направление тока в половине полуобмоток фаз статора. Для того чтобы направление вращения поля при этом осталось неизменным, необходимо также переключить концы двух фаз обмотки (например, фазы В и С).
Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения реостата в цепь ротора. При включении в цепь ротора добавочных активных сопро-тивлений Rдоб1 , Rдоб2 , Rдоб3 и других изменяется форма зависимости М = f(s) и механической характеристики n2 = f(M) двигателя (рис. 4.37, а). При этом некоторому нагрузочному моменту Мн соответствуют скольжения s1 , s2 , s3 , ..., большие, чем скольжения se , при работе двигателя на естественной
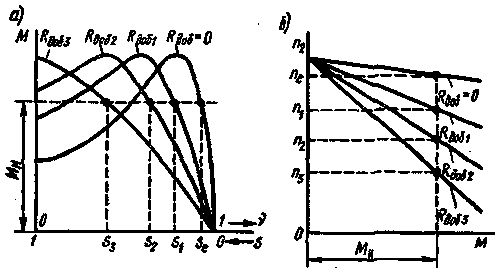 |
Рис. 4.37. Изменение формы механической характеристики при регулировании частоты вращения с помощью добавочного активного сопротивления |
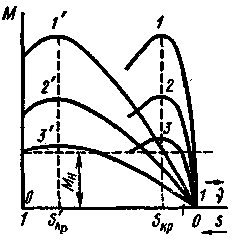 |
| Рис. 4.38. Изменение формы механической характеристики при регулировании частоты вращения путем изменения питающего напряжения |
Этот метод регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются: а) большие потери энергии в регулировочном реостате; б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлении в цепи ротора. В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения.
Регулирование путем изменения величины питающего напряжения. Для двигателей нормального исполнения такое регулирование неприменимо, так как при уменьшении питающего напряжения резко уменьшается максимальный момент Мmax (рис. 4.38, кривые 1, 2 и 3). Критическое скольжение, определяющее зону устойчивой работы двигателя, остается при этом неизменным: sкp = 0,1 ÷ 0,2. Принципиально рассматриваемый метод можно было бы использовать для регулирования двигателей с большим активным сопротивлением ротора, так как в этом случае скольжение s'кp резко возрастает и максимум момента сдвигается в зону, близкую к s = 1 (кривые 1', 2' и 3'), и даже в область, где s > 1. Однако это ведет к значительному увеличению потерь мощности и снижению КПД, поэтому такой метод регулирования частоты вращения можно
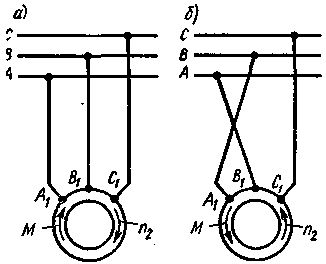 |
| Рис. 4.39. Схемы включения двигателя при изменении направления вращения |
Изменение направления вращения. Для изменения направления вращения ротора электродвигателя надо изменить направление вращения магнитного поля. Как следует из § 3.4, для этого необходимо изменить порядок чередования тока в фазах обмотки статора. В трехфазных машинах это осуществляется путем переключения двух любых проводов, подводящих ток из трехфазной сети к фазам этой обмотки (рис. 4.39, а и 6).