
§ 4.15. АСИНХРОННЫЕ КАСКАДЫ
Регулирование частоты вращения асинхронного двигателя с фазным ротором путем включения реостата в цепь ротора сопровождается потерей энергии в реостате, что может существенно снизить энергетические показатели электропривода. Однако имеется возможность регулировать частоту вращения таких двигателей без потерь энергии в реостате. Для этого электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергию скольжения), посредством преобразовательной установки передают обратно в питающую сеть переменного тока или к вспомогательному двигателю, который сообщает дополнительную механическую энергию валу основного асинхронного двигателя. Сочетание асинхронного двигателя с преобразовательной установкой или с преобразовательной установкой и вспомогательным двигателем называют асинхронным каскадом. В настоящее время в асинхронных каскадах применяют главным образом полупроводниковые преобразователи, поэтому их часто называют вентильными каскадами.
Схемы асинхронных каскадов. На рис. 4.53 показана электрическая схема вентильного каскада, в котором к ротору асинхронного двигателя 2 подключены два полупроводниковых преобразователя — 3 и 4. Рассматриваемая схема позволяет регулировать частоту вращения электродвигателя вниз и вверх от синхронной частоты вращения (s = 0). При s > 0 преобразователь 4 работает в выпрямительном режиме, а преобразователь 3 — в инверторном. При этом электрическая мощность скольжения Ps от ротора асинхронного двигателя передается через преобразователь 4 на преобразователь 3, который преобразует постоянный ток в переменный и возвращает энергию скольжения в питающую сеть. При регулировании вверх от синхронной частоты (s < 0) к ротору асинхронного двигателя через преобразователи 3 и 4 подается из сети дополнительная электрическая энергия; при этом двигатель начинает работать с частотой выше синхронной. Частота в рассматриваемом каскаде регулируется путем изменения режима работы преобразователя 3, т. е. изменения его входного сопротивления. Выходная мощность Р2 двигателя передается рабочей машине 1. При этом, пренебрегая потерями в двигателе и принимая Рэм ≈ Р1 , получаем, что мощность, передаваемая рабочей машине,
Р2 ≈ Рмех ≈ Рэм (1 - s) ≈ P1 (1 - s),
М ≈ Р2 /ω2 =P1 (1 - s)/[ω1 (1 - s)] = const.
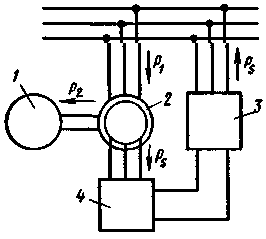 |
| Рис.4.53. Схема вентильного асинхронного каскада |
В настоящее время асинхронные каскады используют главным образом в электроприводах с двигателями большой мощности при широком диапазоне регулирования частоты вращения.
Находят применение также каскадные схемы (рис. 4.54), в которых энергия скольжения через выпрямитель подводится к двигателю постоянного тока.
В схеме электрического каскада (рис. 4.54, а) двигатель постоянного тока 4, получающий от асинхронного двигателя 2 через выпрямитель 5 энергию скольжения Ps , вращает генератор переменного тока 3, который возвращает эту энергию в сеть.
Рис. 4.54. Схемы электрического и электромеханического каскадов асинхронного двигателя с машиной постоянного тока |
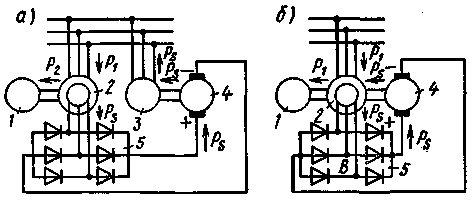 |
В схеме электромеханического каскада (рис. 4.54, б) двигатель постоянного тока 4 жестко соединен с валом асинхронного двигателя 2 и поэтому энергия скольжения преобразуется в механическую. К рабочей машине 1 подается мощность
Р2 + Рs ≈ (1- s)Р1 + Р1s ≈ Р1 ,
Недостатком каскадных схем с двигателями постоянного тока является относительно высокая стоимость коллекторных двигателей и сложность их эксплуатации.
Каскадный двигатель. В ряде случаев условия эксплуатации не позволяют иметь не только коллекторные машины, но и двигатели с контактными кольцами (например, двигатели насосов артезианских скважин, нефтепроводов и т. п.). В этих случаях можно применять каскадный двигатель (рис. 4.55, а), представляющий комбинацию двух двигателей с фазными роторами, которые насажены на один вал и имеют общий корпус. Питание к каскадному двигателю подводится через первый статор 4. Обмотки роторов 1 и 2 соединены между собой с перекрещиванием фаз, вследствие чего МДС роторов вращаются в противоположные стороны. Второй статор 3 подключают к выпрямителю 6 и инвертору 7, отдающим энергию скольжения Рs в сеть переменного тока. Вал двигателя соединяют с рабочей машиной 5.
В простейшем случае (рис. 4.55, б) в обмотку второго статора 3 можно включить трехфазный реостат 8. При этом механические
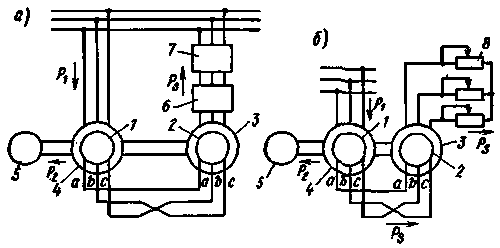 |
Рис. 4.55. Схемы каскадного двигателя с вентильным каскадом (а) и реостатом в цепи второго статора (б) |
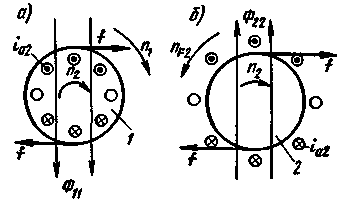 |
Рис. 4.56. Схемы образования электромагнитного момента в каскадном |
Электромагнитный момент каскадного двигателя определяется активной составляющей тока ротора, которая практически равна активной составляющей тока второго статора. Сила этого тока, как и в любом асинхронном двигателе, определяется скольжением s2 поля Ф22 второго ротора 2 относительно второго статора 3. Поскольку МДС и поле Ф22 второго ротора вращаются в сторону, обратную направлению вращения роторов 1 и 2 (рис. 4.56, а и б), скольжение s2 определяется частотой их взаимного пересечения
s2 = (nF2 - n2 )/nF2 ,
Учитывая, что частота вращения ротора n2 = n1 (1 — s), получаем
s2 = (nF2 - n2 )/nF2 = [n1 s1 - n1 (1 - s1 )]/(n1 s1 ) = (2s1 - 1)/s1 .
При s1 < 0,5 скольжение s2 является положительным и электромагнитный момент, действующий на роторы 1 и 2, совпадает с направлением вращения.
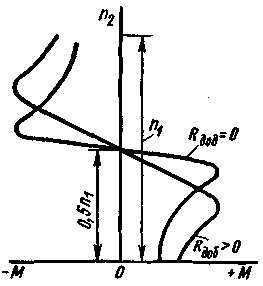 |
Рис. 4.57. Механические характеристики каскадного двигателя |
Каскадные схемы асинхронных двигателей позволяют получить регулирование n2 без преобразователей частоты тока, т. е. сравнительно более простыми средствами. Главным недостатком всех каскадных схем является увеличение потерь в двигателе, в связи с чем увеличивают его габаритные размеры. Поэтому применение каскадных схем можно считать рациональным только на современном этапе, пока преобразователи частоты сравнительно дороги и имеют недостаточно высокую надежность.