
§ 4.9. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Рабочими характеристиками называют графические зависимости частоты вращения п2 (или скольжения s),момента на валу М2 , тока статора I1 , коэффициента полезного действия η и cos φ1 от полезной мощности Р2 при U1 = const и f1 = const. Их определяют экспериментально или путем расчета по схеме замещения или круговой диаграмме.
Примерный вид рабочих характеристик асинхронного двигателя показан на рис. 4.25. Частота вращения, ток статора, момент на валу, потребляемая и полезная мощности приведены на графике в относительных единицах. Рабочие характеристики строят только для зоны практически устойчивой работы двигателя, т. е. до скольжения (1,1 ÷ l,2)sном .
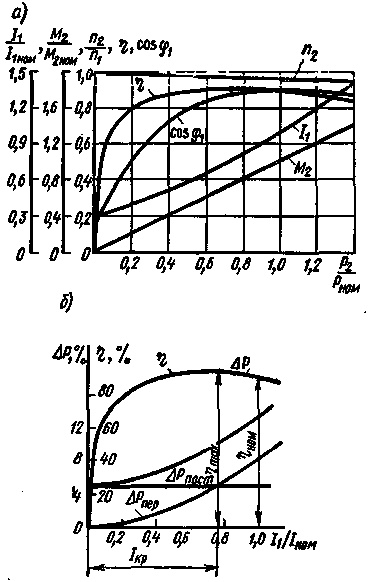 |
| Рис. 4.25. Рабочие характеристики асинхронного двигателя(а)и типичная кривая КПД электрической машины и ее потерь (б) |
Частота вращения ротора. При переходе от режима холостото хода к режиму полной нагрузки частота вращения n2 изменяется незначительно, так как при проектировании двигателей для уменьшения потерь мощности в роторе ΔРэл2 необходимо, чтобы скольжение при номинальном режиме не превышало 0,02—0,06. Следовательно, скоростная характеристика асинхронного двигателя является «жесткой».
Характеристики n2 = f(P2 ) и n2 = f(М) можно построить по круговой диаграмме. Для этого задаются рядом точек на окружности токов и находят соответствующие им значения полезной мощности, электромагнитного момента и скольжения. При расчетах, не требующих большой точности, полезную мощность Р2 принимают равной Рмех (пренебрегая потерями мощности ΔРт ), т. е. считают, что она пропорциональна отрезку AM круговой диаграммы (см. рис. 4.17). Более точно ее определяют путем построения на круговой диаграмме специальной линии полезной мощности О"К (см. рис. 4.18,6), которую получают, соединяя точку О" реального холостого хода с точкой К (в режимах, соответствующих точкам О и К, мощность Р2 = 0). В этом случае величина Р2 пропорциональна отрезку AM, заключенному между окружностью токов и линией 0"К.
Электромагнитный момент пропорционален отрезку AE круговой диаграммы (см. рис. 4.17). Чтобы определить максимальный момент (рис. 4.26, а), через точку Ам проводят касательную к окружности токов параллельно линии ОТ и из этой точки опускают перпендикуляр на диаметр окружности токов. Максимальный момент пропорционален отрезку Aм Eм , где Ем - точка пересечения перпендикуляра с прямой ОТ.
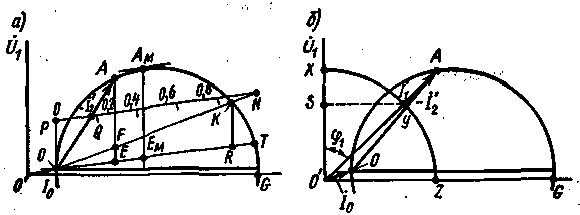 |
Рис. 4.26. Круговая диаграмма со шкалами скольжения (а) и cos φ (б) |
Скольжение s = ΔРэл2 /Рэм можно найти по круговой диаграмме как отношение отрезков FE/AE. Однако поскольку измерение малого отрезка FE может дать существенную погрешность, для определения s надо построить шкалу скольжения (рис. 4.26, а). Для этого на произвольном расстоянии от линии O'G проводят прямую, параллельную линии ОТ, до пересечения ее с линией ОК (или с ее продолжением) и получают точку N. Затем из точки О восставляют перпендикуляр к диаметру окружности до пересечения с построенной прямой и находят точку Р. Линия ОА (вектор тока - Í'2 ) пересекается с прямой PN в точке Q. Из подобия полученных при таком построении треугольников (ΔOFE ~ ΔOPN и ΔOAF ~ ΔOPQ) имеем
FE/OP = OE/PN; OP/AE = PQ/OE.
Перемножая эти отношения, находим
FE/AE = PQ/PN = s.
Следовательно, линия PN представляет собой шкалу скольжения, на которой отрезок PQ, отсекаемый линией ОА (вектором — Í'2 ), позволяет получить скольжение s. Зная скольжение s, по формуле n2 = n1 (I — s) можно определить частоту вращения ротора.
Вращающий момент на валу двигателя. Зависимость между моментом М2 и полезной мощностью Р2 определяется соотношением
Поскольку n2 изменяется мало, эта зависимость близка к линейной. Чтобы определить момент М2 на валу двигателя, по круговой диаграмме находят электромагнитный момент М, а затем из него вычитают момент, обусловленный трением в двигателе, — Мт = ΔРт /ω2 :
Ток статора. Ток I1 получают по круговой диаграмме непосредственным измерением отрезков, соединяющих начало координат с точками А1 , А2 , А3 и другими на окружности токов. Активная составляющая тока пропорциональна полезной мощности. Реактивная составляющая в диапазоне рабочих нагрузок изменяется мало, так как она определяется главным образом током холостого хода, который составляет 20—40% от номинального тока.
Коэффициент мощности. При переходе от режима холостого хода к режиму номинальной нагрузки коэффициент мощности возрастает от значения cos φ1 = 0,09 ÷ 0,18 до некоторой максимальной величины: для двигателей малой и средней мощности (1 - 100 кВт) cos φ1 = 0,7 ÷ 0,9, а для двигателей большой мощности (свыше 100 кВт) cos φ1 =0,90 ÷ 0,95. При дальнейшем увеличении нагрузки cos φ1 несколько уменьшается. Следовательно, работа асинхронного двигателя при малых нагрузках, когда cos φ1 мал, в энергетическом отношении невыгодна. Величину cos φ1 можно определить по круговой диаграмме, если построить на ней дополнительную шкалу. Такой шкалой является отрезок О'Х (рис. 4.26,6), отсекаемый на оси ординат вспомогательной окружностью XYZ произвольного радиуса (его целесообразно принять равным 100 единицам длины). Для определения cos φ1 на линию О'Х проектируют отрезок O'Y, полученный путем пересечения линии ОА (вектора тока Í1 )с окружностью XYZ. При этом отрезок О'S позволяет определить величину cos φ1.
В двигателях с фазным ротором кривые η и cos φ1 располагаются несколько ниже, чем у соответствующих двигателей с короткозамкнутым ротором. На это влияют следующие причины:
а) возникновение дополнительных потерь мощности в результате наличия щеток на контактных кольцах;
б) уменьшение полезной мощности из-за худшего использования объема ротора (обмотку ротора выполняют из изолированного провода, вследствие чего пазы ротора частично заполняются изоляцией);
в) увеличение намагничивающего тока из-за возрастания магнитного сопротивления зубцовопазового слоя ротора в результате уменьшения поперечного сечения зубцов.
Коэффициент полезного действия. Зависимость η от полезной мощности Р2 имеет такой же характер, как и для трансформатора. Эта зависимость имеет общий характер для большинства электрических машин.
При изменении нагрузки электрической машины отдельные виды потерь изменяются по-разному: электрические потери ΔРэл в обмотках статора и ротора, а также добавочные потери ΔРдоб изменяются пропорционально квадрату тока нагрузки; электрические потери в щеточном контакте ΔРщ . элизменяются пропорционально току в первой степени; механические ΔРт и магнитные ΔРм потери остаются практически постоянными - такими же, как при холостом ходе, если напряжение машины U1 и частота ее вращения п2 не изменяются. По этому признаку все виды потерь можно разделить на две группы: постоянные потери ΔРпост = ΔРм + ΔРт и переменные потери ΔРпер = ΔРэл + ΔРщ. эл + Рдоб , которые можно приближенно считать пропорциональными квадрату тока нагрузки (обычно потери ΔРщ. эл малы по сравнению с ΔРэл ). Мощность Р2 ,отдаваемая машиной (Рэл в генераторах и Рмех в двигателях), пропорциональна току нагрузки I в первой степени, поэтому зависимость КПД от тока нагрузки
η = Р2 /Р1 = Р2 /(Р2 + ΔРпост + ΔРпер ) = АI/(АI + В + СI2),
Из (4.57) следует, что при изменении нагрузки электрической машины ее КПД изменяется, как показано на рис. 4.25,6. При холостом ходе η = 0, так как полезная мощность Р2 отсутствует. При увеличении нагрузки КПД возрастает за счет увеличения Р2 , но одновременно быстрее, чем Р2 , возрастают переменные потери ΔРпер , поэтому при некотором токе Iкр увеличение КПД прекращается и в дальнейшем начинает уменьшаться. Если взять производную dη/dt и приравнять ее нулю, то можно получить условие максимума КПД — это наблюдается при такой нагрузке, при которой ΔРпер = ΔРпост.
При проектировании электрической машины обычно так распределяют потери мощности, что указанное условие выполняется при наиболее вероятной нагрузке машины, несколько меньшей номинальной. Во вращающихся электрических машинах средней и большой мощности это условие выполняется при нагрузках примерно 60% от номинальной.
При увеличении номинальной мощности относительная величина суммарных потерь уменьшается. Следовательно, должен возрастать и КПД машины. Эта закономерность проявляется во всех типах вращающихся электрических машин и в трансформаторах — машины большей номинальной мощности всегда имеют соответственно и больший КПД, и, наоборот, КПД машин малой мощности и микромашин обычно невелик. Так, например, КПД вращающихся электрических машин мощностью свыше 100 кВт составляет 0,92 — 0,96, мощностью 1 — 100 кВт — 0,7—0,9, а микромашин — 0,4—0,6.
КПД асинхронного двигателя можно определить из круговой диаграммы как отношение отрезков AF : АС (на упрощенной диаграмме, см. рис. 4.18,а) или AM : АС (на уточненной диаграмме, см. рис. 4.18,6). Однако для получения более точных результатов КПД рекомендуется определять путем расчета отдельных видов потерь.