
§ 4.10. ПУСК АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Способы пуска. При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи - по возможности малыми. Иногда к этим требованиям добавляют и другие, обусловленные особенностями конкретных приводов, в которых используют двигатели: необходимость плавного пуска, максимального пускового момента и пр.
Практически используют следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к обмотке статора при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точки Р, соответствующей условию М = Мст. Ускорение при разгоне определяется разностью абсцисс кривых М и Мст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска Мп < Мст , двигатель разогнаться не сможет.
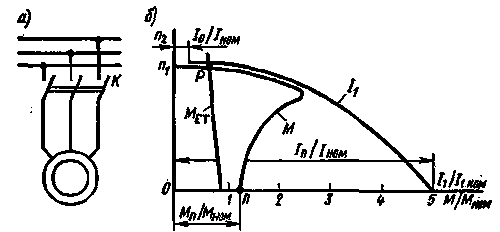 |
Рис. 4.27. Схема прямого пуска асинхронного двигателя и графики изменения моментов и тока |
Значение начального пускового момента можно получить из формулы (4.46а), приняв s = 1:
Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6—100 кВт ГОСТом установлено kп.м = 1,0÷2,0; мощностью 100-1000 кВт - kп.м = 0,7÷1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя.
Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять — семь раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором — низкой стоимости и высоким энергетическим показателям (η, cos φ1, kм и др.).
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3 раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
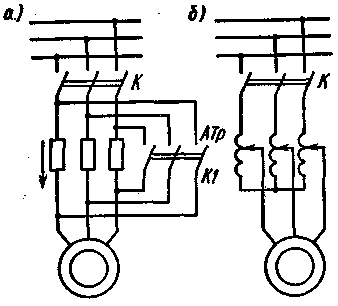 |
| Рис. 4.28. Схемы включения асинхронного двигателя при пуске с понижением напряжения |
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 4.28, а). При этом на указанных сопротив лениях создаются некоторые падения напряжения ΔUдоб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДС Е2s , индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ;
в) подключением двигателя к сети через понижающий автотрансформатор АТр (рис. 4.28,6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
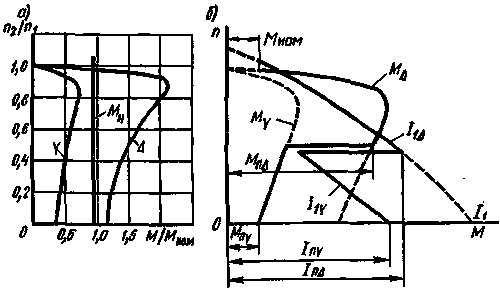 |
Рис. 4.29. Механические характеристики при включении обмотки |
На рис. 4.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Y и Δ, а также графики изменения тока I1 и момента М при пуске двигателя путем переключения обмотки статора со Y на Δ. При соединении по схеме Y максимальный и пусковой момент уменьшаются в три раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом Мн.
Пуск с помощью реостата в цепи ротора. Этот способ применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат Rп, то активное сопротивление цепи ротора увеличится, вследствие чего точка К на круговой диаграмме (рис. 4.30, а) сместится ближе к точке О (точка К'). При этом максимальный момент (отрезок АмЕм) не изменяется, а пусковой момент возрастает от значения Мп до М'п, так как увеличивается отрезок КЕп, пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость М =f(s) сдвигается в область больших скольжений, а зависимость п2= f(М) — в область меньших частот вращения (рис. 4.30,6 и в, кривые 1—4).
Для того чтобы пусковой момент был равен максимальному, необходимо так подобрать сопротивление пускового реостата Rп, чтобы точка К' находилась вблизи точки Ам. Это условие выполняется при R'п + R'2 + R1 ≈ X1 + X'2 . Включение сопротивления R пуменьшает также и пусковой ток двигателя, так как в этом случае
In = U1 /√(R'n + R'2+ R1 )2 + (X1 + Х'2 )2.
Пусковой реостат имеет обычно три — шесть ступеней (рис. 4.31, а), что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, поддерживая высокое значение пуско-вого момента двигателя. Сначала двигатель пускается по характеристике 4 (рис. 4.31,6), соответствующей сопротивлению
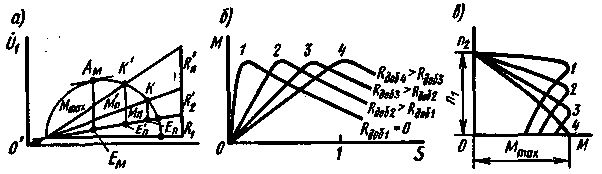 |
| Рис. 4.30. Круговая диаграмма при включении реостата в цепь ротора асинхронного двигателя и получаемые при этом механические характеристики |
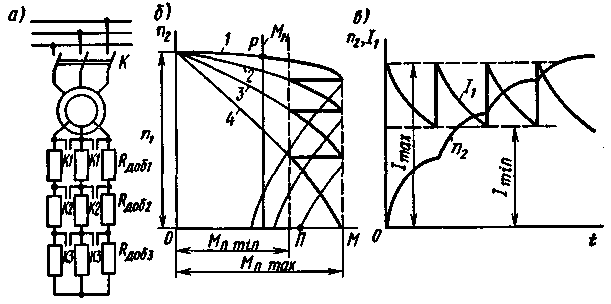 |
| Рис. 4.31. Схема реостатного пуска асинхронного двигателя |
На рис. 4.31, в показан характер изменения тока I1 и частоты вращения n2 при пуске двигателя рассматриваемым способом. Ток также изменяется по ломаной кривой между двумя крайними значениями Imах и Imin.
Недостатком данного способа является его относительная сложность и необходимость применения более дорогих двигателей с фазным ротором. Кроме того, указанные двигатели имеют несколько худшие рабочие характеристики, чем двигатели с короткозамкнутым ротором такой же мощности (кривые η и cos φ1 проходят ниже). В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска, когда необходимо развивать максимально возможный пусковой момент.