
§ 4.22. РАБОТА АСИНХРОННОГО ДВИГАТЕЛЯ ПРИ НЕНОМИНАЛЬНЫХ УСЛОВИЯХ
Изменение частоты. При питании асинхронного двигателя от автономного источника электроэнергии небольшой мощности (транспортные установки, передвижные электростанции) частота и напряжение сети, к которой подключают двигатель, могут отличаться от номинальных. Рассмотрим влияние изменения частоты на работу двигателя при условии, чтонапряжение U1 = Uном = const.
Если принять U1 ≈ Еl , то согласно (4.2)
Фm = U1 /(4,44f1 w1 ko61 ).
Из (4.29) имеем, что
I2 = М/(см Фт cos ψ2).
Следовательно, изменение частоты f1 приводит к изменению потока Фт и соответствующему изменению тока ротора I2 и нагрузочной составляющей I'2 тока статора. При уменьшении частоты магнитный поток и ток холостого хода I0 увеличиваются, причем ток I0 из-за насыщения стали магнитопровода возрастает быстрее, чем магнитный поток. Обычно уменьшение частоты f1 на 10 % вызывает увеличение тока I0 на 20—30%. Поскольку ток I0 является практически реактивным, это приводит к снижению коэффициента мощности двигателя.
При увеличении частоты f1 пропорционально возрастает частота вращения п2 . Если нагрузка двигателя имеет «вентиляторную» характеристику, то нагрузочный момент возрастает пропорционально квадрату или кубу частоты вращения, т. е. частоты f1. Кроме того, магнитный поток Фт уменьшается обратно пропорционально изменению частоты. Все это, согласно (4.106), приводит к резкому увеличению тока I2. При возрастании частоты на 10% ток ротора двигателя, вращающего вентилятор, увеличивается примерно в 1,5 раза, что может привести к перегреву двигателя.
При неизменном нагрузочном моменте увеличение частоты повышает опасность нарушения устойчивости двигателя, так как снижается максимальный момент двигателя пропорционально f12. Таким образом, отклонение частоты f1 от номинального значения приводит к ухудшению условий работы двигателей и поэтому частота не должна отличаться (согласно ГОСТу) от номинальной более чем на 5%.
Изменение напряжения. Обычно асинхронные двигатели рассчитывают так, чтобы при номинальном режиме они имели КПД и cos φ1 , близкие к максимальным. Кроме того, максимум КПД достигается, когда постоянные потери — механические и в стали равны переменным потерям в обмотках (см. § 4.9). Поэтому влияние изменения напряжения является неоднозначным и зависит от нагрузки на валу двигателя.
При увеличении напряжения возрастает магнитный поток и, следовательно, увеличиваются ток холостого хода и магнитные потери в стали магнитопровода. Вследствие этого КПД и cos φ1 двигателя уменьшаются. Уменьшение напряжения опасно тем, что пропорционально квадрату напряжения изменяется максимальный вращающий момент двигателя и при большом моменте нагрузки может произойти нарушение устойчивости двигателя.
Однако при частичной нагрузке, когда нет угрозы нарушения устойчивости, уменьшение напряжения может оказаться благоприятным, так как пропорционально напряжению уменьшаются магнитный поток Фm , ток холостого хода и магнитные потери в стали магнитопровода, вследствие чего КПД и cos φ1 могут возрасти.
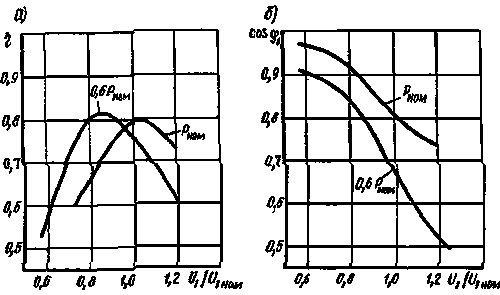 |
Рис. 4.72. Зависимости КПД и cos φ1 асинхронного двигателя от питающего напряжения |
На рис. 4.72, а показаны кривые зависимости КПД от напряжения сети для двух значений мощности двигателя Р = Рном и 0,6Рном . Каждой нагрузке соответствует оптимальное напряжение, при котором постоянные потери равны переменным. Чем меньше нагрузка, тем меньше оптимальное значение напряжения. Коэффициент мощности двигателя при нагрузках, меньших номинальной, также может возрастать с уменьшением напряжения и для каждой нагрузки существует напряжение, при котором коэффициент мощности имеет максимум (рис. 4.72,б). Таким образом, желательно при частичных нагрузках снижать напряжение питания, для того чтобы КПД и cos φ1 поддерживались на высоком уровне.
Рис. 4.73. Круговые диаграммы асинхронного двигателя при номинальном и пониженном напряжении |
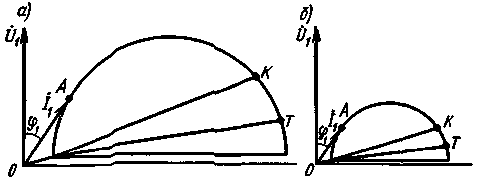 |
На рис. 4.73 показаны круговые диаграммы двигателя при номинальных напряжении и нагрузке (а) и при пониженном напряжении и частичной нагрузке (б). При понижении напряжения уменьшается ток холостого хода и диаметр окружности токов. В обоих случаях значение cos φ1 близко к максимальному, так как вектор тока Í1 расположен по касательной к окружности токов. Если двигатель длительное время работает с нагрузками менее 0,5Рном , то обычно бывает выгодным иметь устройство, регулирующее напряжение (например, трансформатор с регулированием под нагрузкой). В простейшем случае можно изменять фазное напряжение двигателя, переключая его обмотки с соединения Δ (при номинальной нагрузке) на Y (при малой нагрузке).
|
Рис. 4.74. Рабочие характеристики асинхронного двигателя при соединении обмотки статора по схемам Y и Δ |
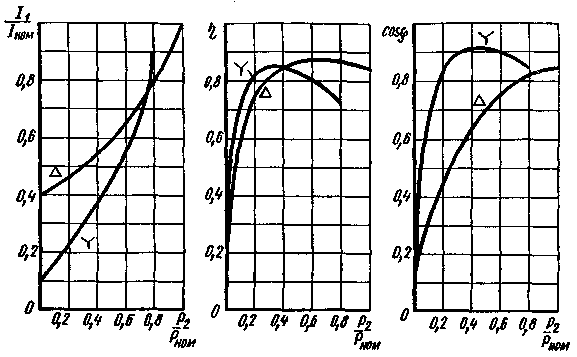
На рис. 4.74 показаны кривые относительных значений I1 , η и cos φ1 для двигателя мощностью 28 кВт при таком переключении. Недостатком такого метода является ступенчатое изменение напряжения. Следует иметь в виду, что при включении обмоток двигателя по схеме Y его максимальный момент, пропорциональный квадрату напряжения, уменьшается в три раза. Следовательно, такое переключение можно производить, если нагрузка двигателя равна или меньше 30% от номинальной.
Несимметрия напряжения. Несимметричную систему трехфазных напряжений можно разложить на симметричные составляющие прямой, обратной и нулевой последовательности (см. гл. 2) и проанализировать влияние каждой из них на работу двигателя. ГОСТ допускает несимметрию напряжения (отношение напряжения обратной последовательности к номинальному напряжению) до 2%.
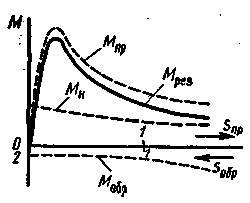 |
Рис. 4.75. Зависимости моментов асинхронного двигателя от скольжения |
Система напряжений обратной последовательности создает магнитное поле, вращающееся в противоположную относительно ротора сторону с частотой вращения nобр = 60f1 р = |n1 |.
Вследствие этого скольжение ротора относительно обратного поля sобр = (n1 - n2 )/n1 = [n1 + n1 (1 - s)]/n1 ≈ 2, так как скольжение асинхронного двигателя в установившемся режиме s ≈ (0,01 ÷ 0,05). Следовательно, обратное поле создает тормозящий момент Мобр, а токи обратной последовательности создают дополнительные потери, увеличивающие нагревание обмоток и снижающие КПД.
На рис. 4.75 показана зависимость моментов асинхронного двигателя от скольжения. Из нее следует, что под влиянием токов обратной последовательности результирующий момент двигателя Мрез снижается и скольжение при том же нагрузочном моменте Мн на валу возрастает.
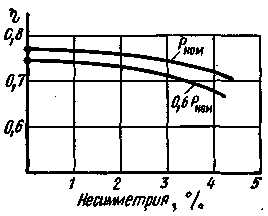 |
| Рис. 4.76. Зависимость КПД двигателя от несимметрии питающего напряжения |
На рис. 4.76 показаны зависимости КПД от асимметрии напряжения для одного из двигателей общего применения мощностью 5,5 кВт. При несимметрии напряжения 2% КПД снижается примерно на 2%, а при 4% почти на 5,5%. Следовательно, несимметрия питающего напряжения крайне нежелательна.
Обрыв фазы обмотки статора. При пуске трехфазного асинхронного двигателя с оборванной фазой создаются такие условия, как и в однофазном двигателе (см. § 4.17), т. е. его результирующий момент Мрез = Мпр — Мобр = 0. Если ротор двигателя в момент обрыва находится во вращении, то Мпр > Мо6р и при Мрез > Мн двигатель продолжает вращаться, однако максимальный момент Мmax оказывается существенно меньшим, чем при неповрежденной фазе. При переходе двигателя в однофазный режим частота вращения практически
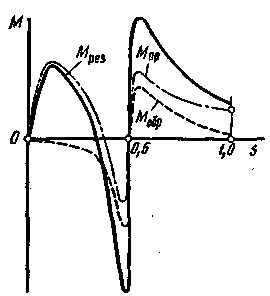 |
| Рис. 4.77. Зависимости моментов асинхронного двигателя от скольжения при обрыве фазы обмотки ротора |
Обрыв фазы обмотки ротора. При несимметрии сопротивлений фаз ротора возникает эффект одноосного демпфирования, подробно рассмотренный в § 6.14. В результате этого кривая момента двигателя в области s = 0,5 имеет провал. Значение этого провала может оказаться настолько большим, что двигатель при пуске под нагрузкой не достигает номинальной частоты вращения и «застревает» при n2 ≈ 0,5п1 . При обрыве одной из фаз ротора электромагнитный момент в области s = 0,5 отрицательный (рис. 4.77), вследствие чего двигатель не разгоняется до номинальной частоты вращения даже при пуске без нагрузки.