
§ 4.20. ЭЛЕКТРОМАГНИТНЫЕ ИНДУКЦИОННЫЕ НАСОСЫ
Эти насосы применяют для перемещения жидких металлов в промышленных установках и в ядерных реакторах. Для приведения в движение металла используется бегущее или вращающееся магнитное поле, созданное трехфазной обмоткой переменного тока. В зависимости от формы канала, по которому перемещается жидкий металл, в магнитном поле электромагнитные насосы подразделяют на винтовые и линейные.
Винтовой индукционный насос (рис. 4.70,а) имеет два статора: внешний 1 и внутренний 2. На внешнем статоре расположена трехфазная обмотка, подключенная к сети трехфазного тока. В воздушном зазоре между двумя статорами расположена плоская труба 4 из немагнитной стали, в которой протекает жидкий металл 3. Труба с жидким металлом винтообразно обвивается вокруг внутреннего статора и может иметь один или несколько витков. При прохождении по обмотке статора трехфазного тока создается вращающееся магнитное поле, которое индуцирует в жидком металле вихревые токи. При взаимодействии этих токов с магнитным полем создается электромагнитная сила, заставляющая жидкий металл перемещаться с линейной скоростью в сторону вращения поля.
На жидкий металл действует сила Fэм = Рэм /V1 , где Рэм — электромагнитная мощность, передаваемая от статора Жидкому металлу; V1 = 2τ f1 — линейная скорость перемещения поля; т - полюсное деление. Напор, развиваемый насосом, H = Fэм /Δl, а его механическая мощность Рмех = Fэм V = HQ, аде Q = VlΔ — объемный расход насоса; V — линейная скорость перемещения металла; l — длина магнитопровода и внутренней полости трубы, заполненной металлом в осевом направлении; Δ — толщина слоя металла в радиальном направлении.
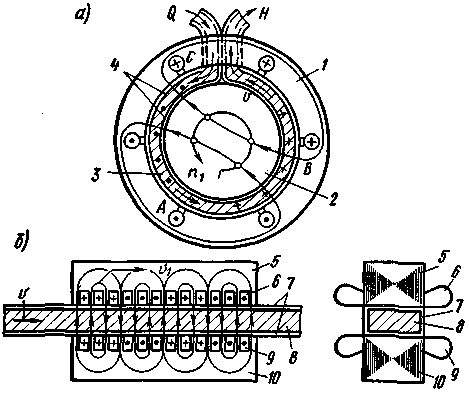 |
Рис. 4.70. Схемы винтового (а) и плоского (б) индукционных насосов |
Если труба охватывает внутренний статор п раз, то напор H увеличивается, а расход Q уменьшается в п раз. Плоский индукционный насос (рис. 4.70,б) состоит из двух плоских статоров 5 и 10, в которых расположены трехфазные многополюсные обмотки 6 и 9. Между статорами находится плоский канал 7 прямоугольного сечения, заполненный жидким металлом 8. При взаимодействии бегущего поля, созданного обмотками 6 и 9 с вихревыми токами, индуцированными им в жидком металле, возникают электромагнитные силы, под действием которых металл перемещается в направлении движения поля с некоторым скольжением (Vl — V)/Vl .