
§ 3.2. ОСНОВНЫЕ ПРИНЦИПЫ ВЫПОЛНЕНИЯ МНОГОФАЗНЫХ ОБМОТОК
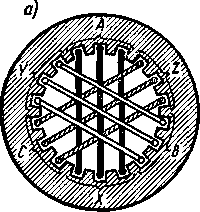
Основные элементы обмоток. В электрических машинах переменного тока обмотки размещают в пазах, расположенных на внутренней поверхности статора и на внешней поверхности ротора. Проводники, находящиеся в пазах, соединяют между собой, при этом образуется ряд катушек (рис. 3.6, а). Расположенные в соседних пазах катушки, соединенные последовательно и относящиеся к одной фазе и паре полюсов, образуют катушечную группу. Каждая фаза обмотки АХ, BY и CZ* в общем случае состоит из нескольких соединенных последовательно или параллельно катушечных групп. Параллельное их соединение применяют при больших фазных токах или при необходимости переключения отдельных катушечных групп.
Простейшим элементом обмотки является виток (рис. 3.6, б), состоящий из двух проводников 1 и 2, которые размещены в пазах, находящихся друг от друга на некотором расстоянии у. Это расстояние приблизительно равно одному полюсному делению τ, под которым понимают длину дуги, соответствующую одному полюсу:
τ = πD/(2p),
*При изложении теории электрических машин переменного тока по аналогии с трансформатором приняты следующие обозначения: А, В, С — начала фаз; X, Y, Z — концы фаз.
 |
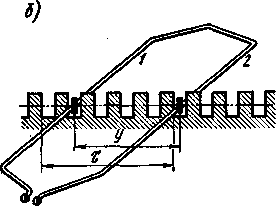 |
Рис. 3.6. Расположение катушек трехфазной обмотки на статоре и образование витка из двух проводников |
где D- диаметр ротора (для обмоток ротора) или внутренней расточки статора (для обмоток статора); 2р - число полюсов.
Полюсное деление т выражают не только через единицы длины, но и через число пазов:
τ = z/(2p),
где z — общее число пазов статора или ротора.
Если у = τ, шаг называют диаметральным или полным; при у < τ — укороченным, при у > τ - удлиненным. Разность τ - у называют укорочением. Часто шаг выражают в относительных единицах в виде у/τ, а укорочение как (1 - у/τ). Расположенные в соседних пазах стороны катушек одной катушечной группы занимают q пазов и образуют фазную зону с углом α = 2πpq/z
Эта величина представляет собой число пазов, приходящихся на полюс и фазу (т - число фаз).
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки (рис. 3.7); иногда их называют секциями. Катушки укладывают таким образом, чтобы в каждом пазу были размещены одна сторона катушки или две стороны разных катушек - одна над другой. В соответствии с этим различают одно-и двухслойные обмотки.
В обмотке статора, представленной на рис. 3.6, а, каждая фаза (АХ, BY и CZ) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. В общем случае в трехфазной обмотке на одном полюсном делении расположено 3q пазов. При q = 1 под каждым полюсом расположено только по одной катушке каждой фазы.
| Рис. 3.7. Устройство катушек обмотки статора при однослойной (а) и двухслойной (б) обмотках | 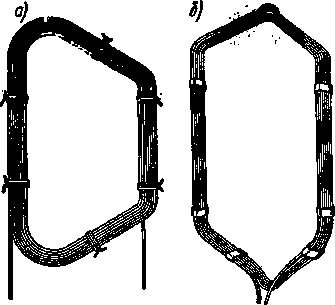 |
Такую обмотку называют сосредоточенной. Как показано ниже, обычно q > 1; при этом обмотку называют распределенной.
Обмотки в большинстве случаев выполняют с целым числом пазов на полюс и фазу. При дробном q фазные зоны только в среднем равны π/3 или 2π/3; в реальной машине часть фазных зон меньше, а часть больше этих значений.
Однофазные обмотки выполняют с фазной зоной а = 120°, т. е. с заполнением 2/3 пазов, а двухфазные обмотки с α = 90°.