
§ 4.18. АСИНХРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ
Асинхронная машина с фазным ротором может служить преобразователем частоты, так как в ее роторе частота тока
f2 = f1 s = p(n1 ± n2 )/60.
При этом знак « - » соответствует вращению ротора в направлении вращения поля, а знак « + » — против вращения поля.
Асинхронный преобразователь частоты (рис. 4.66) состоит из асинхронной машины AM с фазным ротором и соединенного с ней приводного двигателя Д — асинхронного или синхронного. Одна из обмоток машины AM (например, обмотка статора) подключается к трехфазной сети с частотой f1 ; от другой обмотки (ротора) получают переменный ток с частотой f2 = f1 s.
Для получения частоты f2 > f1 ротор асинхронной машины приводят во вращение в направлении, противоположном вращению поля. При этом преобразователь частоты работает в
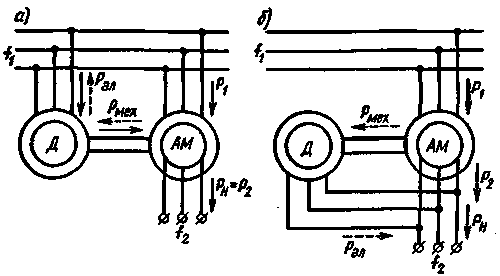 |
Рис. 4.66. Схемы асинхронного преобразователя частоты при |
Направления первичной P1 и вторичной Р2 мощностей преобразователя частоты, механической Рмех и электрической Рэл мощностей приводного двигателя и мощности Рн, подаваемой на нагрузку, для рассматриваемого режима показаны на рис. 4.66, а сплошными стрелками.
Для получения частоты f2 < f1 преобразователь частоты должен работать в режиме двигателя и вращаться в направлении вращения поля. При этом он тормозится электромагнитным моментом машины Д, работающей в генераторном режиме. Эта машина отдает электрическую энергию в ту же сеть, от которой питается преобразователь частоты AM (рис. 4.66, а) или цепь его ротора (рис. 4.66,б). Направления мощностей Рмех , Рэл и Рн для рассматриваемого режима показаны на рис. 4.66, а штриховыми стрелками.
Если приводным двигателем служит асинхронная машина (рис. 4.66, а), то частота выходного напряжения
f2 = (рд ± рпч )f1 /рд ,
Рн = Р2 = Р1 s ; Рмех = (1- s)P1 = [(1 - s )/s]Рн ,
Pн = Р2 + Рмех = Р1 ; Рмех = (1 - s)Р1 = (1 - s )Pн .
Для плавного регулирования частоты f2 необходимо регулировать частоту вращения приводного двигателя Д, например, используя двигатель постоянного тока.