
§ 4.11. КОРОТКОЗАМКНУТЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ С ПОВЫШЕННЫМ ПУСКОВЫМ МОМЕНТОМ
Типы двигателей. Стремление повысить пусковой момент короткозамкнутых асинхронных двигателей без увеличения активного сопротивления обмотки ротора (а следовательно, и потерь энергии в нем) привело к появлению специальных конструкций двигателей, называемых двигателями с повышенным пусковым моментом. К ним относятся двигатели с двойной беличьей клеткой и с ротором, имеющим глубокие пазы (глубокопазные двигатели).
Двигатель с двойной беличьей клеткой (рис. 4.32, а). Ротор этого двигателя имеет две короткозамкнутые обмотки. Наружная клетка является пусковой; она выполнена из стержней малого поперечного сечения и поэтому обладает повышенным активным сопротивлением R2п . Внутренняя клетка является основной рабочей обмоткой двигателя; она выполнена из стержней сравнительно большого поперечного сечения и обладает малым активным сопротивлением R2p .
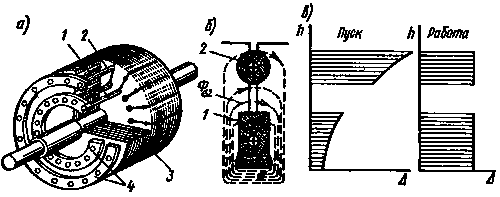 |
Рис. 4.32. Общий вид (с), разрез паза (б) ротора двигателя с двойной беличьей клеткой и распреде- ление плотности тока Δ по высоте А в клетках при пуске и работе двигателя (в): 1 - рабочая клетка; 2 - пусковая клетка; 3 - сердечник ротора; 4 - короткозамыка- ющие кольца |
Индуктивные сопротивления клеток определяются значениями потоков рассеяния Фσ2, сцепленных с их стержнями. Так как пусковая клетка расположена близко к поверхности ротора, то сцепленные с ее стержнями потоки рассеяния Фσ2 (рис. 4.32,6) сравнительно невелики, и она обладает малым реактивным сопротивлением Х2п . Рабочая клетка, наоборот, удалена от поверхности ротора, поэтому она имеет большое реактивное сопротивление Х2р . Увеличение реактивного сопротивления рабочей клетки обеспечивается благодаря соответствующему выбору ширины и высоты паза ротора, а также выбору щели между стержнями обеих клеток. Для повышения активного сопротивления пусковой клетки стержни обычно изготовляют из марганцовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди. Торцовые короткозамыкающие кольца делают медными. В некоторых случаях обе обмотки объединяют и выполняют литыми из алюминия. В электрическом отношении обе клетки включены параллельно, вследствие чего ток ротора распределяется между ними обратно пропорционально их полным сопротивлениям z2п и z2р :
I2п /I2р = Z2p /Z2п = √R22p + X22p /√R22п + X22п .
В начальный момент пуска, когда s = 1 и частота тока в роторе f2 максимальна, индуктивные сопротивления клеток во много раз больше их активных сопротивлений, поэтому
I2п /I2р ≈ Х2р /Х2п ,
По мере разгона ротора уменьшается скольжение s и частота f2 , а поэтому изменяются индуктивные сопротивления Х2р и Х2п и распределение тока между клетками. Из (4.60) следует, что ток начинает постепенно переходить из пусковой клетки в рабочую. По окончании процесса разгона величина s становится малой и роль реактивных сопротивлений в токораспределении оказывается незначительной. В этом случае распределение токов определяется отношением
I2п /I2р ≈ R2р /R2п ,
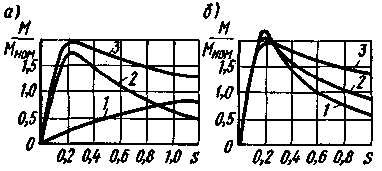 |
Рис. 4.33. Зависимости M=f(s)асинхронных |
Зависимость М = f(s) для двигателей с двойной беличьей клеткой можно построить, рассматривая действие пусковой и рабочей обмоток раздельно. Поскольку пусковая обмотка имеет повышенное сопротивление, максимум образуемого ею момента смещен в область больших скольжений (рис. 4.33, а, кривая 1). Характеристика М = f(s), создаваемая рабочей обмоткой (кривая 2), имеет такую же форму, как и характеристика короткозамкнутого двигателя нормального исполнения; у нее максимум момента соответствует скольжению sкp = 0,1÷0,2. Результирующую характеристику двигателя (кривая 3) можно получить путем суммирования ординат кривых 1 и 2. У двигателя с двойной беличьей клеткой пусковой момент значительно больше, чем у короткозамкнутого двигателя нормального исполнения. Кратность пускового момента этого двигателя Мп /Мном = 1,3 ÷ 1,7, а кратность пускового тока Iп /Iном = 4 ÷ 6.
Глубокопазный двигатель. Принцип действия этого двигателя основан также на явлении вытеснения тока. Беличья клетка выполнена из узких медных или алюминиевых стержней (рис. 4.34, а), заложенных в глубокие пазы ротора, высота которых в 6—12 раз больше ширины. Такие стержни можно рассматривать как проводники, разделенные на большое число слоев. Из рис. 4.34,б видно, что «нижние» слои проводников сцеплены с большей частью потока рассеяния Фσ2, чем «верхние», и имеют соответственно большую индуктивность. В начальный момент пуска при s = 1 частота изменения тока в роторе большая и распределение тока по параллельным слоям определяется в основном их индуктивным сопротивлением. Поэтому при пуске происходит вытеснение тока в
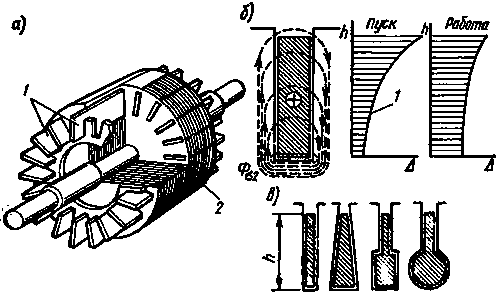 |
Рис. 4.34. Общий вид (а), разрез паза (б) ротора глубокопазного двигателя и разновидности пазов глубокопазных двигателей (в): 1 — стержни беличьей клетки; 2 — сердечник ротора |
Изменение параметров R'2 и Х'2 глубокопазного двигателя в зависимости от скольжения приводит к тому, что характеристика М = f(s) (см. рис. 4.33,б, кривая 2) близка к соответствующей характеристике двигателя с двойной беличьей клеткой (кривая 3). Здесь для сравнения показана характеристика М = f(s) для двигателя с короткозамкнутым ротором нормального исполнения (кривая 1). Существуют разновидности глубокопазных двигателей с трапецеидальной, двухступенчатой и колбообразной формой стержней (рис. 4.34, в).
Магнитный поток рассеяния ротора двигателя с повышенным пусковым моментом по сравнению с магнитным потоком рассеяния ротора двигателя нормального исполнения увеличен, а поэтому он имеет несколько уменьшенный cos φ1 при номинальном режиме и обладает пониженной перегрузочной способностью kм.
Явление вытеснения тока при пуске и связанное с этим увеличение активного и уменьшение индуктивного сопротивлений встречается (в меньшей степени) и у двигателей с короткозамкнутым ротором нормального исполнения. Чтобы усилить эффект вытеснения тока в короткозамкнутых двигателях мощностью до 100 кВт, пазам ротора и стержням придают специальную, сильно вытянутую в радиальном направлении форму (см. рис. 4.4, г). В микродвигателях размеры пазов ротора обычно настолько малы, что использование эффекта вытеснения тока оказывается невозможным.