
§ 4.6. КРУГОВАЯ ДИАГРАММА
Обоснование круговой диаграммы. Наглядное представление. о количественных и качественных соотношениях токов, мощностей и напряжений в отдельных элементах асинхронной машины дает круговая диаграмма. Она является векторной диаграммой схемы замещения асинхронной машины с некоторыми дополнительными построениями. Круговая диаграмма позволяет определить графически все величины, необходимые для построения рабочих и пусковых характеристик двигателя.
В основу построения этой диаграммы положена упрощенная схема замещения с вынесенным намагничивающим контуром (рис. 4.16,6), для которой ток в обмотке статора
В данной схеме ток намагничивающего контура неизменен:
Í0 = Úl /(Zm + Z1) ≈ const,
tg φ0 = (Хт + X1 )/(Rm + R1 ).
Поскольку Хт + X1 > Rm + R1 угол φ0 близок к π/2.
Ток I'2 замыкается по контуру, называемому рабочим (см. рис. 4.16,6). В этом контуре индуктивные сопротивления
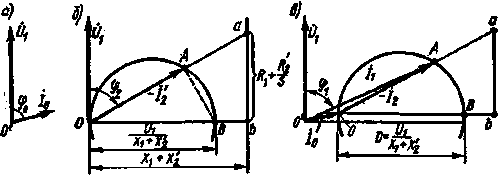 |
Рис. 4.17. Упрощенные векторные диаграммы асинхронной машины |
I'2 max = U1 /(X1 + X'2 ).
Можно доказать, что при изменении активного сопротивления рабочего контура конец вектора тока -Í'2 перемещается по окружности ОАВ, диаметр которой ОВ (рис. 4.17,6) в масштабе тока mi соответствует максимальному значению тока I'2 max. Отложим на оси абсцисс отрезок Ob, равный в масштабе сопротивлений mz реактивному сопротивлению рабочего контура (X1 + X'2), а из точки b перпендикулярно оси абсцисс отрезок bа, равный в том же масштабе активному сопротивлению (R1 + R'2 /s) этого контура при заданном скольжении. Отрезок
| Oa = √ | Ob2 + ba2 |
Zр.к = √(X1 + X'2)2 + (R1 + R'2 /s)2.
Из подобия прямоугольных треугольников Оbа и ОВА можно найти, что Ob/Оа = ОА/ОВ, откуда
|
Тангенс угла между осью ординат и отрезком ОА
tg φ2 = Оb/аb = (X1 + X'2 /R1 + R'2 /s).
Таким образом, отрезок ОА и по величине, и по направлению соответствует вектору тока - I'2. Построение выполнено при произвольном значении скольжения s, поэтому можно утверждать, что конец вектора тока — I'2 при изменении режима работы перемещается по окружности ОАВ диаметром D = U1 /(X1+ Х'2 ).
Совместив начало вектора тока - I'2 с концом вектора I0 , получим векторную диаграмму для упрощенной схемы замещения с вынесенным намагничивающим контуром (см. рис. 4.16,6), которую называют круговой диаграммой асинхронной машины (рис. 4.17, в). В этой диаграмме ток I1 в масштабе mi равен отрезку О'А, ток I'2 — отрезку ОА, а годографом векторов этих токов является окружность диаметром ОВ.
Определение величин, характеризующих работу машины по круговой диаграмме. Кроме токов по круговой диаграмме можно определить также мощности, вращающий момент и другие величины, для чего следует сделать ряд дополнительных построений (рис. 4.18).
Мощность Р1, проводимая из сети к обмотке статора, пропорциональна активной составляющей тока статора I1a = I1cos φ1 , поэтому в масштабе мощностей тр она изображается отрезком АС, перпендикулярным линии O'G, т. е. Р1 = АС • тр . В соответствии с изложенным линию O'G называют иногда линией подведенной мощности.
Мощность, поступающая к намагничивающему контуру,
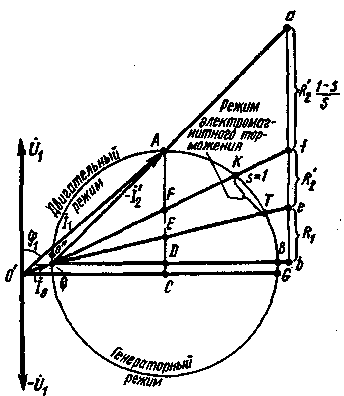 |
Рис. 4.18. Круговая диаграмма асинхронной машины |
Мощность, поступающая к рабочему контуру Рр.к, пропорциональна активной составляющей тока I'2 ; следовательно, она изображается отрезком AD, т. е. Рр.к = ADmp . Эту мощность целесообразно разделить на отдельные составляющие, которые можно определить из схемы замещения:
Рр.к = m1 I'22 [R1 + R'2 + R'2 (1- s)/s],
ΔРэл1 = mp DE; ΔРэл2 = тр ЕF; Рмех = mp FA.
Очевидно, что расположение прямых Of и Ое не зависит от режима работы машины, поэтому они являются неотъемлемой частью круговой диаграммы. Обычно на диаграмме линию ab и ее составляющие отрезки не показывают, а ограничиваются тем, что доводят линии Of и Ое до пересечения с окружностью токов, получая точки К и Т. Линию ОК, до которой измеряется механическая мощность, называют линией механической мощности, а линию ОТ— линией электромагнитной мощности, так как отрезок АЕ характеризует электромагнитную мощность, подводимую к ротору:
Рэм = Рмех + ΔРэл2 = AEmp .
Электромагнитный момент двигателя пропорционален электромагнитной мощности Рэм = Мω1, так как угловая частота вращения магнитного поля ω1 постоянна. Следовательно,
М = Рэм /ω1 = AE(mp /ω1 ) = АEтМ ,
Скольжение двигателя численно равно отношению потерь в роторе к электромагнитной мощности:
s = ΔРэл2 /Рэм = EF/AE .
Приведенные на рис. 4.18 построения являются основными, позволяющими анализировать работу асинхронного двигателя по круговой диаграмме. Часто выполняют также дополнительные построения, которые дают возможность определять по круговой диаграмме скольжение и КПД.
Характерные точки круговой диаграммы. Найдем скольжение для некоторых характерных точек круговой диаграммы. В точке О, определяющей режим холостого хода при идеализированных условиях (когда ток ротора равен нулю), скольжение s = 0. При реальном холостом ходе машина потребляет из сети некоторую мощность для покрытия механических потерь. При этом скольжение отлично от нуля и точка реального холостого хода О" располагается на круговой диаграмме несколько выше точки О.
В точке К скольжение можно определить из условия, что результирующее активное сопротивление цепи рабочего контура равно R1 + R'2:
Rр.к = R1 + R'2 + R'2(1 - sк )/sк = R1 + R'2.
Решая уравнение (4.43), найдем, что sк = 1. Следовательно, точка К соответствует неподвижному ротору, т. е. режиму пуска (начальному моменту пуска) или короткого замыкания. Отрезок ОК представляет собой ток ротора I'2к в режиме короткого замыкания, а отрезок О'К — ток статора I'1к в том же режиме.
В точке Т результирующее сопротивление рабочего контура равно Rl:
Rр.к = R1 + R'2 + R'2 (1 - sт)/sт = R1 ,
Таким образом, режим работы машины, соответствующий точке Т, можно представить только теоретически. Точки О, К и Т делят окружность токов на три части, соответствующие работе машины в режимах: двигательном (часть OAK), генераторном (часть ОВТ) и электромагнитного торможения (часть КТ). В двигательном режиме, когда 0 < п2 < п1 , скольжение изменяется от s = 1 до s = 0, т. е. конец вектора тока I1 перемещается по окружности от точки К до точки О. В генераторном режиме, когда п2 > п1 , конец вектора I1 перемещается по окружности ниже прямой O'G, т. е. активная составляющая тока является отрицательной - мощность отдается в сеть. В режиме электромагнитного торможения, когда п2 < 0, скольжение изменяется от s = 1 до s = + ∞, т. е. конец вектора I1 перемещается по окружности от точки К до точки Т.
Построение круговой диаграммы по экспериментальным данным. Круговую диаграмму можно построить по данным, полученным из опытов холостого хода и короткого замыкания.
Опыт холостого хода проводят при номинальном напряжении U1ном и работе двигателя без нагрузки. При этом измеряют ток холостого хода I0, напряжение U1 и мощность Р0, потребляемую машиной, после чего вычисляют cos φ0.
Опыт короткого замыкания проводят при заторможенном роторе и номинальном (для машин мощностью до 100 кВт) или пониженном (для машин мощностью свыше 100 кВт) Напряжении, которое устанавливают таким, чтобы ток к. з. Iк был не меньше (2,5 ÷ 3) Iном. При этом измеряют напряжение Uк ток Iк и потребляемую машиной мощность Рк, после чего вычисляют ток к. з. при номинальном напряжении Iк.ном = Iк (U1ном/Uк ), cos φк , полные активное Rк = R1 + R'2 и реактивное Хк = X1 + Х2 сопротивления машины. Все вычисления проводят так же, как при опытах холостого хода и короткого замыкания для трансформатора (см. § 2.8).
Для построения упрощенной круговой диаграммы в выбранном масштабе токов miоткладывают векторы токов Í0 и Íк.ном и устанавливают положения точек О и К (рис. 4.19, а); при этом принимают, что при опыте холостого хода ток I0 и угол φ0 соответствуют идеальному холостому ходу. Соединив точки О и К прямой ОК и восставив из ее середины перпендикуляр HO1 до пересечения с линией ОВ, находят центр O1 окружности токов. Линию электромагнитной мощности ОT (линию моментов) определяют, разделив отрезок KB1 в отношении KTl/T1B1 = R'2/R1. При этом сопротивление обмотки статора R1 измеряют во время проведения указанных опытов, а сопротивление R'2 определяют по формуле R'2 = Rк — R1.
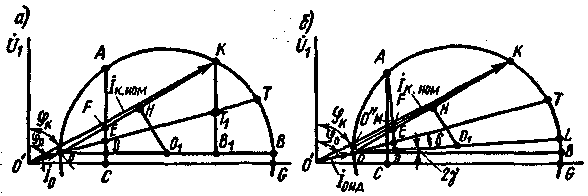 |
Рис. 4.19. Построение упрощенной (а) и уточненной (б) круговых диаграмм по данным опытов холостого хода и короткого замыкания |
Отдельные составляющие энергетического баланса для некоторого режима работы электродвигателя, соответствующего точке А, находят, как показано на рис. 4.18.
Для получения более точных результатов ГОСТ рекомендует строить круговую диаграмму несколько измененным способом - по данным идеального холостого хода и с учетом пренебрегаемого ранее комплекса Ć1 в схеме замещения (см. рис. 4.16, а). При этом способе построение окружности токов производят по точкам О и К, соответствующим режиму идеального холостого хода и короткого замыкания (рис. 4.19,6). Центр этой окружности О1 находят путем пересечения перпендикуляра НО1 не с линией ОВ, как в диаграмме (рис. 4.19, а), а с линией OL, являющейся диаметром окружности токов. Эту линию проводят под углом 2γ к горизонтали, который определяют по приближенной формуле sin2γ ≈ 2I0идR1/U1. Угол γ является аргументом комплекса Ć1 = С1е-jγ и физически представляет собой угол сдвига фаз между векторами напряжения Ú1 и ЭДС É1.
Для определения точки Т, соответствующей s = ± ∞, проводят прямую ОТ под углом δ к линии OL. При этом tgδ = DR1/U1, где D = mi OL — диаметр окружности токов в амперах.
Чтобы определить положение точки О, для идеального холостого хода, ординату точки О" для реального холостого хода уменьшают на величину отрезка О"О (рис. 4.20, а), выражающего в масштабе мощности mр сумму потерь ΔРэл10 + ΔРτ . Соединив точку О с началом координат О", получают вектор тока Í0ид для идеального холостого хода. Для определения потерь ΔРм из мощности Р0, соответствующей реальному холостому ходу, вычитают электрические потери в обмотке статора ΔРэл10 = m1I02R1, возникающие при прохождении тока холостого хода, и механические потери мощности ΔРτ (от трения). Разделение суммы потерь ΔРм + ΔРτ на две части осуществляют путем построения снятой экспериментально зависимости (ΔРм + ΔРτ ) = f(U12); при этом потери ΔРτ = const, а ΔРм изменяются пропорционально U12 (рис. 4.20,6).
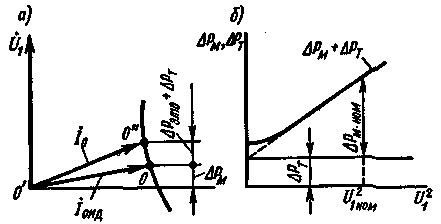 |
Рис. 4.20. Определение на круговой диаграмме |
Отдельные составляющие энергетического баланса для некоторого режима работы электродвигателя, соответствующего точке А, определяются по круговой диаграмме (см. рис. 4.19,6). На диаграмме подведенная мощность Р1 — отрезок АС, проводимый перпендикулярно линии подведенной мощности O'G; электромагнитная мощность Рэм (в масштабе тм - электромагнитный момент) — отрезок АЕ, проводимый перпендикулярно диаметру окружности OL до линии электромагнитной мощности ОТ (линии электромагнитного момента); механическая мощность Рмех — отрезок AF, проводимый перпендикулярно OL до линии механической мощности ОК; полезная мощность Р2 - отрезок AM, проводимый перпендикулярно OL до линии полезной мощности 0"К.
Причины погрешностей круговой диаграммы и области ее применения. Круговая диаграмма, построенная на основании упрощенной схемы замещения асинхронной машины, получила весьма широкое применение благодаря своей простоте и наглядности. Однако значения токов, моментов и других параметров, полученные из круговой диаграммы, могут иметь довольно большую погрешность, особенно в области токов, значительно превышающих номинальный, т. е. при скольжениях, близких к единице.
Применение более точных схем замещения и соответствующих им круговых диаграмм не может полностью устранить погрешность в определении характеристик двигателя при больших скольжениях. Это объясняется тем, что параметры схемы замещения не остаются неизменными, как при построении круговой диаграммы, а изменяются в зависимости от режима работы двигателя. При скольжении, близком к единице, частота тока в роторе увеличивается и ток в проводниках ротора вытесняется в «верхние» их части (см. более подробно в § 4.12). В связи с этим активное сопротивление ротора увеличивается, а его индуктивное сопротивление уменьшается. Насыщение стали зубцов, происходящее при больших токах (т. е. в области скольжений, близких к единице), при закрытых и полуоткрытых пазах также вызывает уменьшение потоков рассеяния, а следовательно, и индуктивного сопротивления ротора. Указанные причины приводят к тому, что по круговой диаграмме можно получать достоверные данные только для токов, не превышающих номинальный. По указанным причинам, очевидно, нецелесообразно при построении круговой диаграммы уточнять параметры схемы замещения путем учета комплекса Ć1.
Все изложенное выше относится только к машинам большой и средней мощности. В машинах малой мощности, и особенно в микромашинах, где ток холостого хода очень велик, все величины, необходимые для построения характеристик двигателя, определяют по точной схеме замещения (рис. 4.16, а). При этом параметры этой схемы из-за малых размеров проводников и небольшой индукции в зубцах остаются практически неизменными при разных токах нагрузки. Для асинхронных исполнительных двигателей круговые диаграммы обычно не применяют, так как точка К, соответствующая s = 1, лежит на диаграмме очень близко к точке холостого хода, и диаграмма утрачивает свою наглядность.