
§ 4.16. ГЕНЕРАТОРНЫЙ РЕЖИМ И РЕЖИМЫ ЭЛЕКТРОМАГНИТНОГО И ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ
Асинхронная машина, статор которой подключен к трехфазной сети переменного тока, может работать не только в двигательном режиме, но и в генераторном, а также в режиме электромагнитного торможения (см. § 4.1).
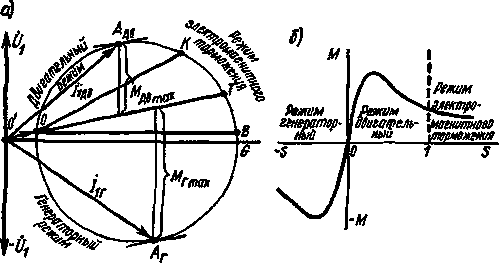
Генераторный режим. Генераторному режиму работы, при котором машина отдает электрическую энергию в сеть, на круговой диаграмме (рис. 4.58, я) соответствует часть окружности токов, лежащая ниже линии O'G. Механическую характеристику асинхронной машины в генераторном режиме (рис. 4.58, б)можно построить по круговой диаграмме или по формуле (4.46) при подстановке в нее отрицательных скольжений.
В генераторном режиме электромагнитный момент является тормозящим. Характер механической характеристики в генераторном режиме сходен с двигательным: по мере увеличения скольжения — s от точки, где s = 0, электромагнитный момент сначала возрастает, достигает максимума при каком-то скольжении, а затем уменьшается.
Из круговой диаграммы видно, что максимальный момент в генераторном режиме больше, чем в двигательном, на 30—50%. Это объясняется тем, что в генераторном режиме Е1 > U1, a следовательно, при равных напряжениях сети магнитный поток и максимальный момент больше, чем в двигательном.
Активная составляющая тока статора Í1г в генераторном режиме противоположна по фазе активной составляющей тока Í1дв в двигательном режиме, т. е. она сдвинута на 180° относительно вектора напряжения U1.Следовательно, машина отдает в сеть электрическую энергию.
Генераторный режим используют практически только для торможения механизмов, приводимых во вращение асинхронными двигателями. Этот способ торможения называют рекуперативным. Типичный пример — спуск груза краном, когда двигатель включается согласно с направлением спуска и
Рис. 4.58. Круговая диаграмма и механическая характеристика |
 |
Переход из двигательного режима в генераторный происходит автоматически, когда частота вращения ротора n2 превышает частоту вращения магнитного поля n1 . Это возможно при переходных режимах электропривода либо при изменении направления нагрузочного момента.
Режим электромагнитного торможения. Если при вращающемся роторе изменяется направление вращения поля асинхронной машины, то оно оказывает на ротор тормозящее действие. Такой режим работы машины называют режимом электромагнитного торможения. При этом частота вращения ротора n2 < 0 (частоту вращения n1 принимают положительной), а следовательно, скольжение s > 1. Рассматриваемому режиму на круговой диаграмме (рис. 4.58, а) соответствует часть окружности токов, расположенная между точками К и Т, а на механической характеристике — область, лежащая в диапазоне скольжений 1 < s < ∞ (рис. 4.58, б). В режиме электромагнитного торможения активная составляющая тока Í1 совпадает по фазе с напряжением Ú1. Следовательно, машина потребляет из сети электрическую мощность.
Чтобы перевести двигатель в режим электромагнитного торможения, следует изменить направление вращения магнитного поля (переключив два любых провода, присоединяющих фазы обмотки статора к сети трехфазного тока) и ввести в цепь ротора добавочное активное сопротивление. Увеличение сопротивления цепи ротора необходимо для ограничения силы тока машины, который при замкнутом накоротко роторе достигает большого значения. Кроме того, если машина работает на естественной характеристике, то режим, соответствую-щий s > 1, является неустойчивым (см. рис. 4.58, б); включение в цепь ротора добавочного активного сопротивления позволяет сдвинуть максимум момента в область скольжения s > 1 (обеспечив тем самым устойчивое электромагнитное торможение) и регулировать тормозной момент.
На рис. 4.59 приведены механические характеристики асинхронной машины в режиме электромагнитного торможения при различных значениях добавочного сопротивления Rдоб в цепи ротора. Чем больше сопротивление Rдоб, тем мягче механическая характеристика и тем дальше в область положительных значений s сдвигается максимум момента.
Практически режим электромагнитного торможения используют для быстрого останова механизмов. Его называют также торможением противовключением. Достоинством его является то, что он позволяет создавать большие тормозные моменты
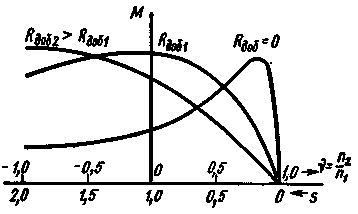 |
Рис. 4.59. Механическая характеристика асинхронной машины при работе ее в режиме электромагнитного торможения |
Следует отметить, что при уменьшении частоты вращения ротора до нуля необходимо отключить двигатель от сети, иначе ротор начнет вращаться в противоположном направлении.
Режим динамического торможения. В рассматриваемом режиме статор асинхронной машины отключают от сети переменного тока, а затем две его фазы подключают к источнику постоянного тока. При этом в машине появляется постоянный магнитный поток возбуждения, индуцирующий в обмотках ротора переменную ЭДС. Чтобы создать тормозной момент, к обмоткам ротора подключают активное сопротивление, в котором гасится энергия, возникающая в машине в результате торможения приводного механизма. В режиме динамического торможения асинхронная машина превращается в автономный синхронный генератор, работающий на реостат (см. гл. 6).