
ГЛАВА XIX
ДРУГИЕ МЕТОДЫ ПРОТИВОСОЕДИНЕНИЯ. КОРОТКОЗАМКНУТЫЙ ДВИГАТЕЛЬ КАК НАИБОЛЕЕ РАСПРОСТРАНЕННЫЙ ТИП
§ 183. Описание схемы противосоединения, предложенной автором.
Наиболее распространенный на практике метод пуска в ход асинхронных двигателей — реостатный — наряду со своими многими положительными качествами (плавный пуск в ход, высокий начальный момент) обладает, однако, тем недостатком, что удорожает конструкцию двигателя: требует наличия в двигателе контактных колец со щетками, приспособления для подъема щеток и, кроме того, наличия пускового реостата, стоимость которого для двигателей малой и средней мощности часто составляет 20—30% от стоимости всего двигателя.
В разное время был разработан целый ряд методов безреостатного пуска в ход асинхронных двигателей, предложенных Бушеро и Гергесом.
Из всех методов весьма простым и надежным является метод противосоединения Гергеса; этим объясняется его большое распространение на практике по сравнению с другими.
По сравнению с этим методом противосоединения Гергеса реостатный метод пуска в ход, однако, обладает большими преимуществами, так как при нем в момент пуска в ход ток в роторе может быть ограничен до любой величины и угол сдвига фаз между роторным током и э. д. с. может быть также сделан небольшим, благодаря чему получаются благоприятные условия для создания высокого начального момента вращения.
Автор настоящей книги разработал такую схему соединения обмотки ротора, которая в известной мере соединяет в себе достоинства обоих методов пуска в ход — метода противосоединения и реостатного. При новой схеме может быть получен высокий начальный момент при небольшом пусковом токе.
Автор нашел, что некоторые части самой обмотки ротора могут быть использованы в качестве пускового реостата.
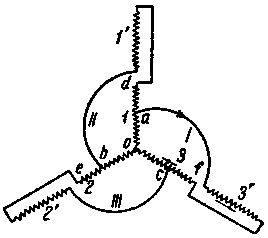
Для этой цели необходимо соединить эти части обмотки ротора друг против друга таким образом, чтобы в магнитном отношении они компенсировали друг друга; приключив полученное таким образом почти чистое омическое сопротивление к оставшимся частям фаз обмотки ротора, мы добьемся двух результатов: пусковой ток ротора понизится и его cos φ повысится, что в свою очередь создаст благоприятные условия для образования высокого начального момента вращения. На фиг. 204 показана в виде примера схема трехфазной обмотки ротора, где применен вышеупомянутый принцип.
 |
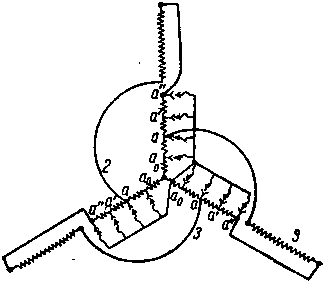 |
| Фиг. 204. Метод противосоединения (автора) — первый вариант. | Фиг. 205. Рабочее соединение обмотки ротора. |
Как видно из этой фигуры, при таком соединении обмотка каждой из трех фаз ротора разделена на две равных части:
вторая.......................................... 2 и 2',
третья............................................3 и 3'.
Для получения высокого начального момента, как будет выяснено ниже, необходимо, чтобы соответственные провода половин обмоток одной и той же фазы были расположены в общих пазах. Из фиг. 204 видно, что половины фаз 1, 2 и 3 соединены между собой в звезду, остальные же части фаз 1', 2' и 3' соединены с серединами обмоток 1, 2 и 3 в точках а — b — с так, что образуются следующие три замкнутые цепи:
оb — 1' — 1 (цепь II)
ос — 2' — 2 (цепь III)
В каждой из этих трех замкнутых цепей действует э. д. с., индуктированная в 1/4 части всей фазы. Так, например, в цепи оа — 3'—3 действует э. д. с, индуктированная в части обмотки оа, в то время как э. д. с. обмоток 3 и 3' взаимно уничтожаются; ток i, вызванный э. д. с. обмотки оа, обтекает обмотки 3' и 3 в обратном направлении, благодаря чему магнитные поля обмоток 3 и 3' являются почти целиком укомпенсированными (при условии, что провода обмоток 3 и 3' лежат в общих пазах); эти обмотки поэтому для тока i представляют собой почти чистое омическое сопротивление и являются, таким образом, как бы пусковым реостатом для обмотки оа, вследствие этого сдвиг фаз между током i и э. д. с, индуктированной в обмотке оа, уменьшается, и начальный момент вращения двигателя возрастает.
Все сказанное относительно цепи I одинаково приложимо к остальным цепям II и III.
Как будет показано ниже при соединении обмотки ротора согласно фиг. 204 пусковой ток двигателя в статоре будет составлять приблизительно 1/4 величины от тока короткого замыкания при рабочем соединении ротора.
Желая получить еще меньшую величину пускового тока, необходимо точки а — b — с переместить ближе к точке о; наоборот, постепенно удаляя точки присоединения а — b — с от точки о, мы будем получать все большую величину пускового тока.