
ГЛАВА XXXIII
ЖЕЛЕЗО И ОБМОТКИ СТАТОРА И РОТОРА
§ 302. Определение высоты железного сердечника статора и ротора.
Найдем величину магнитной индукции в сердечнике статора. При этом для упрощения задачи сделаем предположение, что величина магнитной индукции в железе сердечника статора всюду одинакова и равна Bas1.
Имея в виду, что магнитный поток в сердечнике статора разветвляется на две половины, найдем
| Bas = | Ф/2 | . |
| hs • l • k2 |
k2— коэфициент, учитывающий влияние изолирующих прослоек между железными листами, из которых набран статор (k2 = 0,91 для листов с бумажной изоляцией и
k2= 0,95 для лакированных листов);
hs — высота железного сердечника статора (фиг. 334).
Из формулы (302,1) найдем
| hs = | Ф | . |
| 2k2• l • Bar |
Величина средней магнитной индукции Bas , входящей в формулу (302,2) обычно выбирается в зависимости от числа периодов сети f1. Во избежание больших потерь железа в статоре обычно при относительно большой частоте тока сети f1 выбирают малое Bas и, наоборот, при малой частоте f1 можно Bas брать больше. Средние рекомендуемые значения Bas, которыми можно задаваться при расчете, приведены в нижеследующей таблице:
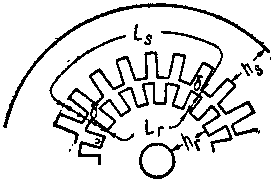 |
| Фиг. 334. Магнитная цепь асинхронного двигателя. |
ТАБЛИЦА 36
Средняя величина магнитной индукции в железе статора Bas и ротора Ваr
| f1 | Bas (статор) | Bar (ротор) |
| 50 | 13 000-15 000 | 10 000 - 16 000 |
Замечание. Обычно в быстроходных машинах (с малым числом полюсов 2р = 2) приходится выбирать меньшее значение магнитной индукции в воздушном зазоре βl по сравнению с машинами, имеющими 2р > 2. Причину этого можно уяснить, исследуя уравнение
| Bar = | Ф/2 | ≈ | Ф/2 | . |
| hrlk2 | hrl |
Подставляя сюда приближенно
hr ≈ D/2,
| Bar = | Ф/2 | = | Ф | , |
| D/2l | Dl |
после подстановки в последнее выражение
| Ф = Blαiτl = Blαi | πD | . |
| 2pl |
| Bar = | Blαiπ | . |
| 2p |
Отсюда видно, что при уменьшении числа полюсов 2р и при прочих равных условиях магнитная индукция в сердечнике ротора возрастает. Поэтому в быстроходных машинах приходится вообще выбирать меньшие значения индукций в зазоре Bl, что приводит к понижению степени использования машины.
Последнее наглядно иллюстрируют фиг. 327 и 328, из которых видно, что кривые σ для двухполюсных машин лежат ниже, чем кривые σ для многополюсных машин.
При выборе высоты железного сердечника ротора hr по вышеприведенной формуле (302,3) обычно задаются магнитными индукциями в железе ротора, имеющими более высокое значение, чем в статоре.
Ротор обычно вращается со скоростью, почти равной ско-рости вращающегося магнитного потока; вследствие этого число циклов перемагничивания железа ротора в единицу времени здесь очень невелико, и следовательно, потери железа в роторе обычно относительно невелики.
Поэтому величина магнитной индукции в железе ротора Вar и Вz вообще может быть допущена больше, чем в железе статора Bas .