
ГЛАВА XXIX
СИНХРОННО-ИНДУКЦИОННЫЕ ДВИГАТЕЛИ
§ 262. Индукционная машина двойного питания.
Можно получить машину с синхронной скоростью и не пропуская в обмотку ротора постоянного тока, как было описано выше. Для этой цели необходимо осуществить соединение обмоток машины согласно схеме фиг. 305.
 |
 |
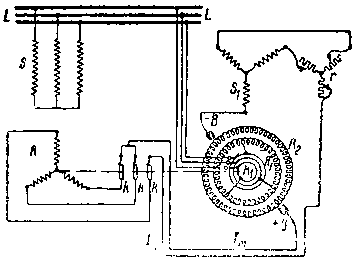
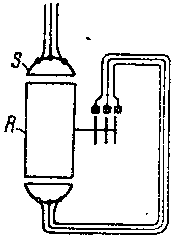
| Фиг. 303. Синхронно-индукционный двигатель S — R с преобразователем-возбудителем S1— R1 — R2 (схема автора). | Фиг. 304 |
На этой фиг. 305 показана индукционная машина, у которой статорная обмотка S и роторная R через посредство контактных колец присоединены к общей сети.
Машина в такой схеме соединения, когда статор и ротор получают питание непосредственно от сети, носит название машины двойного питания.
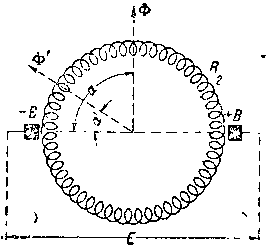
Для выяснения принципа действия такой машины обратимся к фиг. 306, где схематически показан статор S и ротор R такой индукционной машины двойного питания.
Предположим, что многофазная статорная обмотка создает вращающееся поле F1, делающее n1 оборотов в минуту и вращающееся по стрелке часов, как показано на фиг. 306.
Обмотку ротора через посредство контактных колец соединим с сетью таким образом, чтобы вращение поля ротора F2 относительно проводов этого ротора было направлено против стрелки часов.
Для такой машины возможны два режима работы: первый режим характеризуется неподвижным ротором, когда n2 = 0. В этом случае поля F1 и F2 будут вращаться в пространстве в разные стороны и машина не будет создавать никакого вращающего момента.
Второй режим работы получится, если привести ротор каким-либо вспомогательным двигателем во вращение в направлении, обратном вращению м. д. с. F2 с числом оборотов в минуту n2, равным двойному синхронному, т. е. со скоростью n2 = 2n1.
В этом случае магнитное поле ротора F2 будет в пространстве вращаться в ту же сторону, что и поле статора F1 (т. е. по стрелке часов), и с такой же скоростью.
При таких условиях поле ротора F2 будет взаимодействовать с полем статора Fl, в результате чего машина начнет развивать вращающий момент.
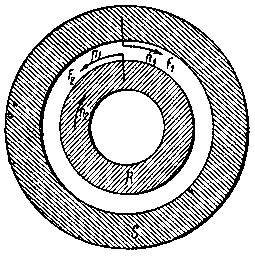
При этом машина все время будет вращаться с постоянной (двойной синхронной) скоростью независимо от нагрузки. Таким образом с этой точки зрения машина двойного питания ведет себя как синхронная машина. Вместо параллельного соединения обмоток статора S и ротора R их можно соединить последовательно, как показано на фиг. 307.
 |
 |
 |
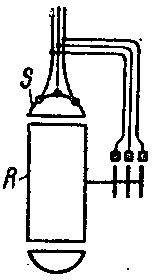
| Фиг. 305. Двигатель двойного питания. | Фиг. 306. | Фиг. 307. Двигатель двойного питания |
При перегрузках выше предельного момента машина двойного питания "выпадает из синхронизма" и останавливается, это является существенным недостатком такой машины. Вторым недостатком машины двойного питания является ее наклонность к "качаниям".
Поэтому машины этого типа не нашли распространения на практике.
Как было сказано выше, машина двойного питания не может самостоятельно развернуть свой ротор до двойной синхронной скорости и требует небольшого вспомогательного двигателя для пуска в ход.
Пуск в ход машины двойного питания может быть осуществлен также и по-другому.
При пуске в ход можно ротор машины двойного питания приключить к вспомогательному преобразователю частоты, изменяющему постепенно частоту питающего потока от нуля до двойной частоты сети.
В этом случае ротор машины двойного питания постепенно самостоятельно раскручивается до двойной синхронной скорости, после чего его контактные кольца могут быть приключены к сети.
При помощи такого преобразователя частоты можно также осуществить регулирование скорости машины двойного питания. Машина двойного питания может устойчиво работать, как показал проф. В. А. Толвинский,1 также и в асинхронном режиме вблизи скорости вращения вращающегося поля машины.
В этом случае мы имеем как бы совмещение в одном корпусе двух асинхронных двигателей. Один из таких двух двигателей состоит из статора, получающего питание из сети, и из ротора, замкнутого не на короткое, как обычно, а на ту же сеть, которая может быть рассматриваема как своего рода реостат, включенный в цепь ротора машины.
Другой двигатель имеет первичной своей цепью ротор той же машины, получающий питание из сети, а вторичной цепью является статор, замкнутый на сопротивление сети. При таких условиях в обмотках статора и ротора будут протекать токи двух частот — частоты сети и скольжения. При этом токи частоты скольжения будут протекать по проводам сети, что может создать затруднения в работе других приемников электроэнергии, приключенных к сети. Это обстоятельство ограничивает возможность распространения машин этого типа.