
ГЛАВА XXIX
СИНХРОННО-ИНДУКЦИОННЫЕ ДВИГАТЕЛИ
§ 260. Различные способы соединения обмотки ротора с возбудителем.
 |
 |
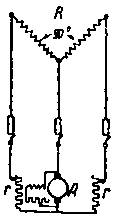 |
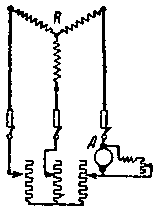
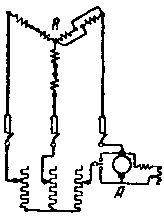
| Фиг. 297. | Фиг. 298. Схемы включения возбудителя А в цепь ротора. | Фиг. 299. Схема с двухфазным ротором. |
Разные фирмы, строящие эти двигатели, применяют различные способы соединения обмотки ротора с возбудителем.
На фиг. 297—299 показано несколько схем таких соединений. На всех этих фигурах обозначают:
R — ротор;
А — якорь возбудителя;
r — пусковой реостат;
статор асинхронного двигателя на фиг. 297—299 не показан.На фиг. 297 изображена весьма часто применяемая простейшая схема соединения обмотки ротора R с возбудителем А; из этой фигуры видно, что ток возбуждения подводится к одной фазе ротора и затем разветвляется между двумя остальными фазами, которые оказываются, таким образом, соединенными друг с другом параллельно.
Для того чтобы избежать неравномерной нагрузки отдельных фаз, получаемых при этом, иногда одна из фаз ротора разбивается на 2 параллельные ветви, как это показано на фиг. 298.
При этом, конечно, приходится считаться с несимметричностью обмотки при пуске в ход, пока двигатель работает как асинхронный. На фиг. 299 показана схема с двухфазной обмоткой в роторе. На фиг. 300 показана другая схема соединений. По окончании процесса пуска в ход здесь возбудитель А включается в цепь ротора так же, как это было показано на одной из предыдущих схем (фиг. 297).
Оригинальность этой схемы заключается в том, что постоянный ток включается в цепь ротора как раз в тот момент, когда условия вхождения в синхронизм получаются наилучшими.
Опыты и теоретические рассмотрения приводят к тому, что самосинхронизация происходит скорее и лучше всего при условии, что цепь реостатов замыкается, и включается постоянный ток в фазу а (фиг. 300), когда мгновенное значение переменного тока в этой фазе равно нулю. Операции переключения должны быть начаты немного раньше этого момента времени, так как самый процесс переключения и нарастания тока требует некоторого времени; опыты показали, что операция переключения должна быть начата примерно на 1/4 периода скольжения раньше, чем ток упадет в фазе а до нуля, т. е. в тот момент, когда ток скольжения в фазе а проходит через максимальное свое значение и имеет противоположное направление тому постоянному току, который должен будет установиться в фазе а после того, как будет приключен возбудитель А.
При малых частотах скольжения этот момент времени без большого труда можно уловить, включив в цепь ротора амперметр постоянного тока.
На схеме фиг. 300 этот момент улавливается автоматически, и возбудитель включается как раз в надлежащий момент при помощи специального реле. Это реле имеет две катушки, из которых одна обтекается переменным током фазы а, а другая же может получать постоянный ток от зажимов возбудителя в том случае, если переключатель реле 4 поставлен в правое положение (контакт b).
Ни одна из вышеописанных катушек реле в отдельности не в состоянии преодолеть действия пружины и привести в действие главный переключатель; последний приводится в действие только при условии включения обеих катушек в тот момент, когда переменный ток фазы а проходит через свой максимум, причем магнитный поток, создаваемый катушкой переменного тока, совпадает по направлению с потоком, создаваемым катушкой 5.
На фиг. 301 и 302 приведены кривые тока статора, ротора и скольжения, иллюстрирующие явления, происходящие при синхронизации одного синхронноиндукционного двигателя Эрликон мощностью в 100 kW. Фиг. 301 относится к тому случаю, когда переключение производится в наивыгоднейший момент; из фигуры видно, что переход из асинхронной на синхронную работу происходит плавно, без качаний.
Фиг. 302 иллюстрирует явления, происходящие в том случае, когда включение возбудителя в цепь ротора происходит в невыгодный момент времени; из фигуры видно, что при этих условиях возникают сильные колебания и толчки тока в статоре.