
ПРИМЕР РАСЧЕТА ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С ГЛУБОКИМИ ПАЗАМИ В РОТОРЕ
§ 342. Задание.
Необходимо спроектировать асинхронный двигатель с короткозамкнутым ротором на 15 kW, 750 об/мин (синхр.), 220/380 V 50 герц. Для получения высокого пускового момента вращения ротор двигателя в виде беличьей клетки должен быть выполнен с глубокими пазами. Потери и перегрев должны удовлетворять условиям ОСТ.
I. Главные размеры
1) Число пар полюсов находим по формуле
| р = | 60f | = | 60 • 50 | = 4 |
| п | 750 |
2) Согласно OCT 678 принимаем
η = 0,86; cos φ = 0,83.
3) Кажущаяся подведенная мощность в kVA будет
| kVA = | kW | = | 15 | = 21. |
| η cos φ | 0,86 • 0,83 |
4) Предполагая статор соединенным в Y, найдем фазный ток в статоре
| Il = | kVA 1 000 | = | 21 • 1 000 | = 32 A. |
| √3U | √3 • 380 |
5) Мощность на 1 полюс
| kVA | = | 21 | = 2,62. |
| 2p | 8 |
6) По кривым находим для машины данной мощности величину машинной постоянной
С ≈ 36 • 104.
Задаемся предварительно величинами Bl = 7 200 и AS = 330. Найдем для разных вариантов диаметр D и длину li машины. Ниже приводятся данные выбранного варианта:
ТАБЛИЦА 44
| D cm | τ cm | AS | Bl | D2li | li cm | l1 | ns х bs | liτ |
| 26 | 10,2 | 330 | 7 200 | 9 440 | 13,9 | 14,9 | l x l | 1,36 |
7) Окончательно принимаем:
li = 145 mm.
Число железных пакетов 2.
Длина железного пакета 7 cm.
Длина железа l = 2 • 7 = 14 cm.
Число вентиляционных каналов ns = 1.
Ширина вентиляционных каналов bs = 1.
Общая длина железа
Расчетная длина
8) Воздушный зазор согласно ОСТ 678 возьмем
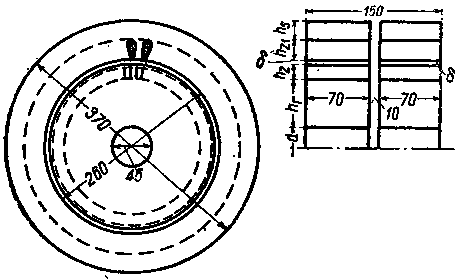 |
| Фиг. 386. |
II. Обмотка, пазы, ярмо статора
9) Число пазов на полюс и фазу выбираем из такого расчета, чтобы ширина паза bn получилась в допустимых пределах (в среднем от 0,6 cm до 1,3 cm).
Выбираем q= 2.
10) Число пазов статора
11) Зубцовое деление статора
| ts = | nD | = | n • 260 | = 17 mm. |
| z1 | 48 |
12) Принимаем для статора двухслойную американскую обмотку. Находим число проводов в пазу
| sn = | t1AS | = | 1,7 • 330 | = 17,5. |
| I1 | 32 |
13) Округляя, принимаем окончательно
14) Число витков в фазе статора
| w1 = | snpq | = | 18 • 4 • 2 | = 144. |
| a | 1 |
15) Выбираем для статорной обмотки укороченный шаг у ≈ 0,8t. Таким
образом шаг обмотки по пазам будет
Округляя до целого числа, получаем окончательно
16) Шаг в долях полюсного деления
| β = | y | = | 5 | = | 5 | . |
| 3q | 3•2 | 6 |
17) Обмоточный коэфициент распределения
| sin | π | sin | 180 | |||||
| kр = | 2m | = | 2 • 3 | = | sin 30° | = 0, 963. | ||
| q1sin | π | 2 sin | 180 | 2 sin 15° | ||||
| 2mq | 2•3•2 |
18) Коэфициент укорочения шага
| kу = sin (β • 90°) = sin | 5 | 90° sin 75° = 0,966. |
| 6 |
19) Результирующий обмоточный коэфициент
20) Выбираем плотность тока статора
21) Сечение проводов статора
| qa1 = | I1 | = | 32 | 7,1 mm2. |
| Δ1 | 4.5 |
Согласно OCT 4123 выбираем медь с диаметром 3,05/3,35 и сечением
22) Чертим эскиз паза. По чертежу подсчитываем сечение паза θ = 318 mm2 (см. фиг. 387).
Коэфициент заполнения паза
| qa1 • sn | = | 7,3 •18 | = 0,413, |
| θ | 318 |
23) Принимаем класс изоляции А. Проводники — с изоляцией ПБД. Пазовая изоляция "латероид" толщиной 2 • 0,5 mm. Прокладка между верхним и нижним слоями (между секциями) — промасленное полотно толщиной 2 • 0,5 mm.
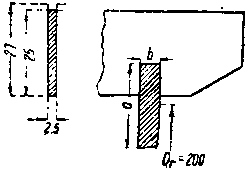
 |
| Фиг.387 |
Деревянный клин.
24) Проверяем нагрев обмотки.
а) Длина лобовой части
б) Длина полувитка
в) Активное сопротивление фазы, приведенное к 75° С:
| r1 = 1,24 | 2w1lа1 | = 1,24 | 2 • 144 • 30,3. | = 0,264 Ω. |
| 5 700 qа1 | 5 700 • 7,3 |
г) Нагрев обмотки
| Δt° = | 55 (1,05mr1I12 + VFe ) | . |
| (1 + 0,1ns ) A |
Подставляя в эту формулу значение найденного ниже
VFe = 340 и значение А (взятое по кривым 1 для диаметра D = 26), равное А = 1 700, найдем
| Δt° = | 55 (1,05 • 3 • 0,264 • 322 +340) | = 34,7° С.. |
| (1 + 0,1 • 1) 1700 |
25) Найдем магнитный поток при холостом ходе
| Ф = | U • 108 | = | 220 • 108. | = 0,74 • 106. |
| 4,44k1w1f | 4,44 • 0,93 • 144 • 50 |
26) При таком потоке максимальная индукция в воздушном зазоре получается
| Bl = | Ф | = | 0,74 • 106 | = 7 250. |
| aiτli | 0,69 • 10,2 • 14,5 |
27) Наименьшая ширина зубца статора:
Индукция в зубцах
| Bz max = | Blt1 | = | 7 250 • 1,7 | = 17 000. |
| z1min k2 | 0,8 • 0,91 |
Здесь k2 = 0,91 учитывает изоляцию прослоек при бумажной изоляции железных листов.
28) Найдем высоту ярма статора, задаваясь Bs = 13 200. Получим
| hs = | Ф | = | 0,74 • 106 | = 2,2 cm. |
| 2k2lBs | 2 • 0,91 • 14 • 13 |
Внешний диаметр статора
1 По В. А. Трапезникову "Основы проектирования серий асинхронных машин".
III. Обмотка, пазы и ярмо ротора
Ротор выполняем короткозамкнутым в форме беличьего колеса с "глубокими пазами".
29) Число пазов ротора выбираем
30) Ток в стержне ротора
| Is = | Р • 1 000 | , |
| z2E2 • 0,93 |
| E2 = | U | = | 220 | = 0,82 V, |
| 2w1k1 | 2 • 144 • 0,93 |
| Is = | 15 • 1 000 | = 333 A. |
| 59 • 0,82 • 0,93 |
31) Принимаем сечение меди ротора
Плотность тока будет
| s2 = | Is | = | 333 | = 6,65 A/mm2. |
| qа2 | 50 |
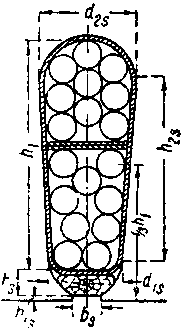
Размеры паза ротора будут (см. фиг. 388).
32) Определяем ток в замыкающем кольце
| Iк = | Is | = | 333 | = | 333 | = | 333 | = 792 A. | ||||
| 2 sin | p | 180° | 2 sin | 4 | 180° | 2 sin 12,2° | 2 • 0,21 | |||||
| z2 | 59 | |||||||||||
 |
| Фиг. 388. |
33) Сечение кольца примем
Плотность тока в кольце будет
| sк = | Iк | = | 792 | = 5,3 A/mm2. |
| qк | 150 |
34) Зубцовое деление ротора
| tr = | πDr | = | 3,14 (260 — 2 • 0,5) | = 13,9 mm. |
| z2 | 59 |
35) Находим диаметр вала
| d = 14,4 • 3 | √ | л. с. | = 14,4 3 | √ | 15 • 1,36 | ≈ 45 mm. |
| n | 750 |
36) Определяем высоту "спинки" ротора
IV. Расчет магнитной цепи
37) Индукция в зубцах статора
По чертежу:
Наибольшая ширина зубца
Средняя ширина зубца
| Bz min = | Bl t1 | = | 7 250 • 1,7 | = 14 600, |
| k2 • zmax | 0,91 • 0,93 |
| Bz cp = | Bl t1 | = | 7 250 • 1,7 | = 15 500. |
| k2 • zср | 0,91 • 0,865 |
38) Находим ампервитки для зубцов статора. кривой намагничивания находим:
awz cp= 35,
awmin = 23.
Средние удельные ампервитки
| awzs = | 80 + 23 + 4 • 35 | = 40,5. |
| 6 |
Суммарные зубцовые ампервитки
39) Точно так же найдем для зубцов ротора awzr = 8,8
40) Ампервитки для воздушного зазора
| k0 = ( | ts + 10δ | )( | tr + 10δ | )= 1,37, |
| zs + 10δ | zr + 10δ |
41) Находим ампервитки в железе статора. о кривой намагничивания дли Bs = 13 200 найдем aws = 14.
42) Ампервитки железа ротора
| Br = | Ф | = | 0,74 • 106 | = 3 640. |
| 2hrkrl | 2 • 8 • 0,91 • 14 |
По кривой намагничивании находим awr = 1, AWr = awr Lr = 1 • 3,5 = 3,5
43) Суммарные ампервтки на полюс
AW0 = AWl + AWzs + AWzr + AWs + AWr =
= 400 + 134 + 24 + 95 + 3,5 ≈ 656.Найдем отношение
| AW0 | = | 656 | = 1,64. |
| AWl | 400 |
44) Намагничивающий ток
| Ior = | 2,22 • AW0 • p | = | 2,22• 656• 4 | = 14,5 A. |
| m • w1• k1 | 3 • 144• 0,93 |
45) Процентное значение намагничивающего тока
| Ior% = | Ioб | 100 = | 14,5 | 100 = 45,5%. |
| I | 32 |
V. Параметры двигателя
46) Реактивное сопротивление рассеяния статорной обмотки.
| x1 = | 4πf1w12 | λ • li , |
| p • q1• 108 |
где
а) Магнитная проводимость паза статора
| λn = 1,25 • kn ( | h1 | + | h2 | + | 2h2 | + | h1s | ); |
| 3bn | bn | d1s + bs | bs |
| kn = | 3β + 1 | = | 3 • 0,833 + 1 | = 0,875, |
| 4 | 4 |
b) Магнитная проводимость для потоков рассеяния лобовых соединений (двухслойная обмотка с сокращенным шагом)
| λs = 0,4 | τq | = 0,4 | 10,2 • 2 | = 0,54. |
| li | 15 |
с) Магнитная проводимость между коронками зубцов
| λz = | tr | = | 13,9 | = 1,74. |
| 18δ | 18 • 0,5 |
d) Cуммарная магнитная проводимость
e) Реактивное сопротивление фазы статора
| x1 = | 4π • 50 • 1442 | 4,06 • 14,5 = 0,95 Ω. |
| 4 • 2 • 108 |
17) Активное сопротивление фазы статора
| r1 = k • | 2w1la1 (1 + 0,004T) | = 0,264 Ω.. |
| 5 700qa1 |
48) Активное и реактивное сопротивление ротора
а)
| r'2 = [rs + | 2rr | ] | 4m1(w1k1)2 | ; | ||
| (2sin | πp | )2 | z2 | |||
| z2 | ||||||
Активное сопротивление стержня
| rs = l | ρ | = 15,5 | 1 | . 1 |
| 100 • qa | 46 • 100 • 50 |
| rs = | 15,5 • 1 | = 6,73 • 10-5Ω |
| 46 • 100 • 50 |
(здесь 1/46 — удельное сопротивление меди).
1 Здесь l — длина стержня.
b) активное сопротивление части замыкающего кольца между стержнями ротора
| rr = | πDr ρ | = 15,5 | π • 200 • 0,0218 | = 0,155 • 10-5 Ω |
| z2 • 100 • q | 59 • 100 • 156 |
с)
| r2 = rs + | 2rr | = rs + Rr = 6,73 • 10-5 + | 2 • 0,155 • 10-5 | = | ||||
| (2sin | πр | )2 | (2sin | 180 • 4 | )2 | |||
| z2 | 59 | |||||||
d) Приведенное активное сопротивление ротора
| r'2 = r2• | 4m1 (w1k1)2 | = 8,49 • 10-5 • | 4 • 3 (144 • 0,93)2 | = 0,312 Ω. |
| z2 | 59 |
е) Найдем приведенное реактивное сопротивление ротора. Для этой цели сначала подсчитаем удельную магнитную проводимость паза ротора (открытого)
| λn2 = 1,25( | h1 | + | h2 | ) = 1,25 ( | 25 | + | 2 | ) = 5,17. |
| 3bn | bn | 3 • 2,5 | 2.5 |
f) Удельная магнитная проводимость головок зубцов ротора
| λzr = | ts | = | 17 | = 2,13. |
| 18δ | 18 • 0,5 |
g) Удельная проводимость торцевых колец ротора
| λzr = 2,5 | Dr | = 2,5 | 20 | = 0,55. |
| z2li | 59 • 15,5 |
h) Суммарная магнитная проводимость
i) Реактивное сопротивление ротора, приведенное к статорной цепи,
| х'2 = 377 | (w1k1)2 | liλ2 • 10-7, |
| z2 |
| х'2 = 377 | (144 • 0,93)2 | 14,5 • 7,85 • 10-7 = 1,3 Ω. |
| 59 |
49) Найдем данные короткого замыкания, которые получились бы, если бы, не было явления "вытеснения" тока.
хk = х1 + х'2 = 0,95 + 1,3 = 2,25 Ω;
zk = √хk2 +rk2 = √2,252 + 0,5762 = 2,28 Ω;
| cos φk = | rk | = | 0,576 | = 0,252; |
| zk | 2,28 |
| Ik = | U | = | 220 | = 96,5 A; |
| zk | 2,28 |
| Ik | = | 96,5 | = 3,02. |
| I1 | 32 |
VI. "Вытеснение" тока в стержне ротора
50) При пуске в ход активное и реактивное сопротивления стержня беличьей клетки могут быть выражены
xs = хв + kххn .
Коэфициенты, входящие в эти выражения, могут быть найдены из следующих выражений:
| kr = α • | sin h 2α + sin 2α | ; |
| cos h 2α — cos 2α |
| kх = | 3 | α• | sin h 2α + sin 2α | ; |
| 2 | cos h 2α — cos 2α |
Здесь
Если стержни в роторе медные высотой h, не превосходящей 5 cm, вышенаписанные выражения для kr и kх упрощаются и получают вид
| kr = α = h √s; kx = | 3 | = | 1,5 | ; kr = h; kx = | 1.5 | . |
| 2α | h √s | h |
Подставляя сюда h = 2,5 cm, найдем
| kr = 2,5; kx = | 1,5 | =0,6. |
| 2,5 |
Подсчитаем изменение (уменьшение магнитной проводимости паза ротора при пуске
Найдем полную магнитную проводимость рассеяния ротора при пуске
λ'2 = kх • λn + λz + λs = 3,1 + 2,13 + 0,55 = 5,78.
Реактивное сопротивление ротора при пуске:
| x'2k = x'2 | λ'2 | = 1,3 | 5,78 | = 0,95 Ω. |
| λ2 | 7,85 |
Общее реактивное сопротивление при пуске:
xk = x1 + x'2k = 0,95 + 0,95 = 1,9 Ω.
51) Найдем пусковое общее сопротивление двигателя с учетом влияния вытеснения тока
a) Как было найдено выше, активное сопротивление фазы беличьего ротора без учета влияния "вытеснения" равно
r2 = rs + Rr = 6,73 • 10-5 + 1,76 • 10-5 = 8,49 • 10-5 Ω.
b) Активное сопротивление фалы с учетом вытеснения
r2k = krrs + Rr = 16,8 • 10-5 + 1,76 • 10-5 = 18,6 • 10-5 Ω.
c) Коэфициент увеличения активного сопротивления ротора
| 18,6 • 10-5 | = 2,2. 1 |
| 8,49 • 10-5 |
1 Получилась величина, меньшая 2,5, вследствие влияния активного сопротивления торцевых частей беличьей клетки, в которых "вытеснение" тока невелико.
d) Приведенное активное сопротивление ротора с учетом „вытеснения"
| r'2k = r'2( | r2k | ) = 0,312 • 2,2 = 0,68 Ω. |
| r2 |
e) Пусковое суммарное активное сопротивление
rk = r1 + r'2k = 0,264 + 0,68 = 0,944.
f) Пусковое общее сопротивление (с учетом "вытеснения")
zk = хk2 + rk2 = √1,92 + 0,9442 = 2,12 Ω.
g)
| cos φk = | rk | = | 0,944 | = 0,45. |
| zk | 2,12 |
Таким образом видно, что "вытеснение" тока в стержнях ротора повышает коэфициент
| мощности при пуске в отношении | 0,45 | . |
| 0,252 |
52) Пусковые характеристики двигателя
а) Пусковой ток с учетом вытеснения;
| Ik = | U | = | 220 | = 104 A. |
| zk | 2,12 |
b) Кратность пускового тока
| Ik | = | 104 | = 3,24, |
| I | 32 |
с) Пусковой момент
| Mk = m1Ik2 r'2k( | 0,975 | ); |
| ns |
| Mk = 3 • 1042 • 0,68 ( | 0,975 | ) = 28,6 kgm. |
| 750 |
Если бы в двигателе отсутствовало явление "вытеснения" тока, то мы получили бы
| Mk = m1Ik2 r'2( | 0,975 | ) = 3 • 96,52 • 0,312 ( | 0,975 | ) = 11,3 kgm. |
| ns | 750 |
VII. Коэфициент полезного действия двигателя
53) Находим потери при номинальной нагрузке
Потери меди статора V1 = 890 W
Потери меди ротора V2 = 585 W "Добавочные" потери согласно нормам принимаем равными 0,5% or подведенной мощности V0 = 0,005 Р1 = 0,005 • 17,3 = 86 W.
Механические потери принимаем равными 3% от полезной мощности
Vρ = 0,03 • 15 000 = 450 W.
Потери железа VFe = 340 W.
Сумма всех потерь
V = V1 + V2 + Vd + Vρ = 2,35kW.
54) Находим к. п. д. при номинальной нагрузке
| η = | Р2 | = | 15 | = 0,86. |
| Р2 + V | 15 + 2,35. |