
ГЛАВА XXVII
КОМПЕНСАТОРЫ СДВИГА ФАЗ
§ 252. Компенсаторы сдвига фаз с самовозбуждением
(фиг. 286). В случае асинхронных двигателей большой мощности введение коллектора в ротор наталкивается на затруднения, связанные с коммутацией; в этих случаях может быть с выгодой применено каскадное соединение асинхронного двигателя с особой компенсирующей машиной или с так называемым "компенсатором сдвига фаз"; последнее соединение удобно и в том отношении, что в случае какойлибо порчи коллектора компенсационной машины последняя может быть выключена, после чего асинхронный двигатель может продолжать работать как некомпенсированный.
"Компенсатор" сдвига фаз, предложенный впервые Лебланом (Le-blanc), по своему устройству сходен с рассмотренным выше преобразователем частоты, но не имеющим контактных колец; он состоит из ротора, снабженного обмоткой постоянного тока и коллектором, и статора, лишенного обмотки (фиг. 286); если к коллектору такого компенсатора подвести многофазный ток, то обмотка ротора создаст магнитный поток, вращающийся в пространстве со скоростью n3, зависящий только от числа периодов питающего тока f2 и от числа пар полюсов обмотки р2 и не зависящий от скорости вращения самого ротора:
| n3 = | 60 f2 | об/мин. |
| р2 |
Если привести ротор компенсатора во вращение со скоростью n4 в ту же сторону, в какую вращается магнитный поток, то последний относительно обмотки ротора будет перемещаться со скоростью скольжения n3 — n4 = s2n3 и вызовет в обмотке э. д. с.
Ek = 4 • 44 • k3w3 • s2f2 Ф3 •10-8,
где k3w3— обмоточный коэфициент и число витков одной фазы обмотки ротора компенсатора;
Ф3 — амплитуда вращающегося потока компенсатора; э. д. с. Еk смещена по фазе относительно Ф3 (а следовательно, и относительно тока I2, вызывающего этот магнитный поток) на 90°.
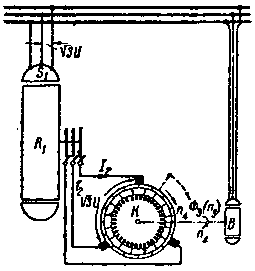 |
| Фиг. 286. Схема соединения асинхронного двигателя S1 — R1 с компенсатором сдвига фаз К. |
Как показывает уравнение (252,1), при скорости компенсатора ниже синхронной (s2 > 0), э. д. с. Ek2 положительна; Еk2 отстает по фазе от Ф3 на 90°, при синхронной скорости Ek2 = 0, так как при этом условии провода ротора компенсатора совсем не пересекаются силовыми линиями вращающегося потока; при скорости компенсатора выше синхронной (s2 < 0) Ek2 делается отрицательной величиной: Ek2 опережает по фазе Ф3 на 90°; последним обстоятельством и пользуются для компенсации сдвига фаз асинхронного двигателя, присоединяя ротор последнего к коллектору компенсатора, вращающегося сверхсинхронно.
На фиг. 286 показана схема соединения асинхронного двигателя с "компенсатором"; S1 и R1 — статор и ротор главного асинхронного двигателя, К— компенсатор, приключенный со стороны коллектора к ротору асинхронного двигателя; В — небольшой асинхронный двигатель, сидящий на одном валу с компенсатором и приводящий его во вращение.
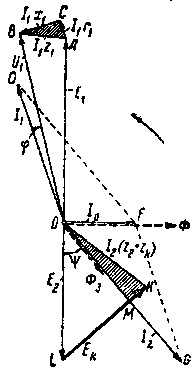
На фиг. 287 изображена векторная диаграмма асинхронного двигателя, соединенного с компенсатором.
Здесь ОА = — Е1 слагающая, уравновешивающая э. д. с., индуктированную в статоре асинхронного двигателя вращающимся потоком;
АВ = I1z1— слагающая, уравновешивающая падение напряжения в обмотке статора;
 |
| Фиг. 287. Векторная диаграмма асинхронного двигателя, соединенного с компенсатором. |
ОВ = Ek1— напряжение у зажимов статора; OL = E2 — э. д. с, индуктированная вращающимся потоком Ф в роторе двигателя 1;
1 Всюду для простоты предполагаем k1w1= k2w2, так что
Е2 = Е2 и I'2 = I2.
LK = Ek2— э. д. с., индуктированная в якоре компенсатора, опережающая по фазе ток ротора I2 на 90°;
ОМ = I2(r2 + rk) и МК= I2 (х2 + хk) — уравновешивающие падения напряжения омическое и индуктивное (вызванное потоками рассеяния) в обмотках ротора главного двигателя и якоря компенсатора;
ОК = I2 (z2 + zk) — уравновешивающая суммарное падение напряжения в обмотках ротора главного двигателя и компенсатора.
Векторная диаграмма фиг. 287 выясняет значение э. д. с. Ek, индуктированной в якоре компенсатора; благодаря наличию Ek вектор тока в роторе OG = I2 опережает Е2 по фазе ∕—) ψ (а не отстает от E2, как это имело бы место в некомпенсированном асинхронном двигателе). Благодаря этому ток статора OD = I1 (представляющий собой геометрическую сумму намагничивающего тока OF = I0 и обратной величины вторичного тока FD) приближается к совпадению по фазе с напряжением U; I1 может даже опережать по фазе U на ∕—) φ, как это показано на фиг. 287.
Изменяя соответственным образом скорость вспомогательного двигателя В (фиг. 286), а следовательно, и величину э. д. с. Ek, мы можем компенсировать сдвиг фаз при разных режимах работы главного двигателя.