
ВВЕДЕНИЕ
§ 4. Вращающееся магнитное поле (двухфазное).
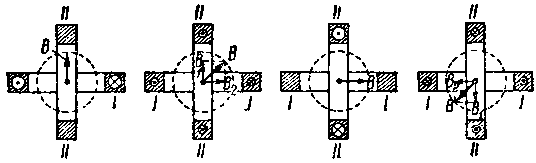
Для того чтобы понять механизм образования вращающегося магнитного поля, рассмотрим следующий примитивный опыт согласно фиг. 9,b.
На этой фигуре изображены две с одинаковым числом витков катушки I и II, оси которых расположены в пространстве перпендикулярно друг к другу. Как видно из этой фигуры, катушка I обтекается током i1 ,а катушка II — током i2 .
 |
| Фиг. 9. Образование вращавшегося двухфазного магнитного поля. |
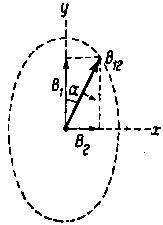
Предположим сначала, что токи i1 и i2 — постоянны и что ток i1 , проходящий по катушке I, создает внутри этой катушки магнитную индукцию В1 , а ток, текущий в катушке II, — индукцию В2 (фиг. 9,а).
Результирующая величина магнитной индукции В в точке О получится путем геометрического суммирования отдельных величин В1 и В2 , согласно фиг. 9,а.
Как видно из этой фигуры, угол наклона а зависит от относительной величины векторов В1 и В2 ; угол α будет сохранять постоянную величину при постоянном значении векторов В1 и В2 .
Теперь посмотрим, что получится, если токи i1 и i2 , питающие катушки I и II, будут переменными.
Предположим вначале, что катушки будут питаться двухфазным током, так что ток в катушке I будет
i1 = Im • sin ωt,
i2 = Im • sin (ωt - π/2).
Тогда в какой-нибудь момент времени магнитная индукция в середине первой катушки будет
В1 = Вт sin ωt,
В2 = Bm sin (ωt - π/2),
Результирующая величина В12 получится путем геометрического сложения векторов В1 и В2 :
В12 = √В12 + В22 = √Bm2 • sin2ωt + Bm2 sin2 (ωt - π/2) =
=Вm√sin2ωt + sin2 (ωt - π/2) = Bm • √sin2ωt + cos2ωt = Bm = const.
Таким образом мы видим, что результирующий вектор В12, полученный путем геометрического сложения двух переменных векторов В1 и В2 , остается все время постоянным:
В12 = Вт = const.
Посмотрим, как будет при этом меняться его направление, определяемое углом α на фиг. 9, а.
Из прямоугольного треугольника (фиг. 9, а), имеем
| tg α = | B2 | = | Bm sin(ωt - π/2) | = | sin(ωt - π/2) | = | sin(ωt - π/2) | = tg(ωt - π/2). |
| B1 | Bm sinωt | sinωt | cos(ωt - π/2) |
 |
| Фиг. 10. Вращение результирующего вектора В. |
Отсюда мы видим, что
α = (ωt - π/2),
Таким образом α на фиг. 9,а с течением времени непрерывно возрастает, т. е. это значит, что результирующий вектор В12 вращается с равномерной угловой скоростью, равной со, причем конец этого вектора В12 описывает окружность (фиг. 9,а), в результате чего получается вращающееся магнитное поле.
 |
| Фиг. 11. Эллиптическое вращающееся магнитное поле |
На фиг. 10 показано геометрическое построение для разных моментных значений магнитных индукций В1 и В2 , причем моментное значение тока, текущего в катушках I и II, показано условно кружками разного диаметра, Как видно из фиг. 10, результирующий вектор В при обтекании катушки I и II двухфазным током, вращается в пространстве с постоянной скоростью.
Все приведенные выше выводы были сделаны в предположении, что число витков в катушках I и II и эффективное значение напряжений на зажимах этих катушек одинаковы. Если числа витков в катушках I и II неодинаковы, то можно доказать, что конец результирующего вектора В12 будет перемещаться не по окружности, а по эллипсу, в этом случае получается так называемое эллиптическое вращающееся магнитное поле (фиг. 11).