
ГЛАВА XXV
КАСКАДНОЕ СОЕДИНЕНИЕ ДВУХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
§ 219. Регулирование скорости асинхронного двигателя путем включения в цепь ротора реостата
(фиг. 163). Это весьма распространенный метод регулирования скорости; он отличается крайней простотой и заключается в том, что с целью понижения скорости двигателя включается в каждую фазу обмотки ротора добавочное омическое сопротивление R2 (фиг. 163).
Для того чтобы выяснить, как будет влиять на работу двигателя добавочное сопротивление R2, рассмотрим фиг. 258.
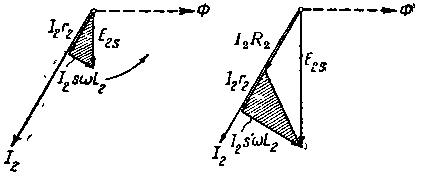
На левом чертеже этой фигуры изображена векторная диаграмма токов и напряжений в роторе нормально работающего двигателя; на правом чертеже изображена векторная диаграмма для того случая, когда в цепь ротора включено сопротивление R2; при построении этих диаграмм сделано предположение, что сила тока в роторе I2 в обоих случаях (фиг. 258) имеет одну и ту же величину.
Сравнивая между собой обе векторные диаграммы, мы видим, что вектор э. д. с. ротора E2s , на правой диаграмме больше, чем на левой. Последнее вызвано тем обстоятельством, что э. д. с. ротора E2s , при включенном сопротивлении R2 (правый чертеж фиг. 258) должна уравновесить не только омическое падение напряжения в самой обмотке ротора I2r2, но еще вдобавок — падение напряжения I2R2 в регулирующем реостате.
Так как величина э. д. с. ротора пропорциональна скольжению (E2s = s), то отсюда следует, что при условиях правой диаграммы на фиг. 258 (когда в цепь ротора включено сопротивление R2) двигатель будет работать с большим скольжением, т. е. будет вращаться медленнее, чем при данных левой диаграммы этой фигуры.
 |
| Фиг. 258. Диаграмма при разном скольжении ротора. |
Чем больше будет включено сопротивление R2 в цепь ротора, тем больше будет вектор I2R2 (при том же токе I2), что повлечет за собой соответственное увеличение э. д. с. E2s , и, следовательно, увеличение скольжения.
Описанный здесь метод регулирования скорости обладает большим недостатком: вследствие включения в цепь ротора сопротивления R2 к. п. д. двигателя сильно понижается.